一、自适应模糊PID控制
自适应模糊PID控制将模糊控制与传统PID控制相结合,将两种控制方式进行结合,取长补短,对传统的算法进行优化,形成一种新的控制算法,自适应模糊PID控制可以用于很多场景,比如温度控制,机器人控制,过程控制等等。本文将对自适应模糊PID控制算法原理进行叙述,并完成温度控制建模和仿真。
1.1 模糊自适应PID控制器设计
1.1.1 控制系统结构

上图中,系统的输入是控制变量的偏差和偏差的变化率,输出变量为,模糊控制器里面是模糊控制规则,根据模糊规则实时改变PID参数中的
的值,从而实现PID参数的自整定,使得被控对象具有更好的性能。设定PID控制器的参数初始值
可得
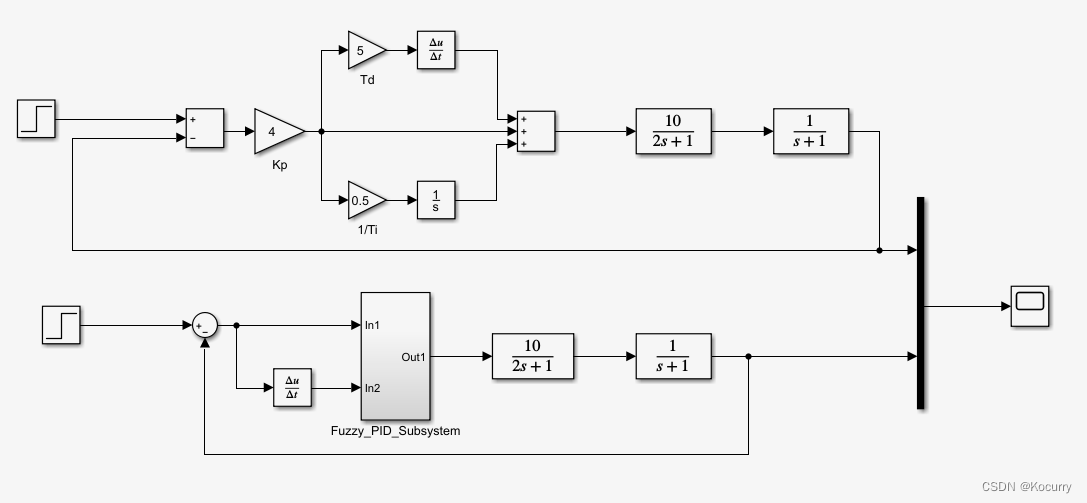
1.2 Simulink仿真
这里建立传递函数模型,对常规PID控制器和自适应模糊PID控制器进行建模,建模过程不再赘述。利用Simulink搭建模型进行仿真。模型如下:
仿真结果如下:
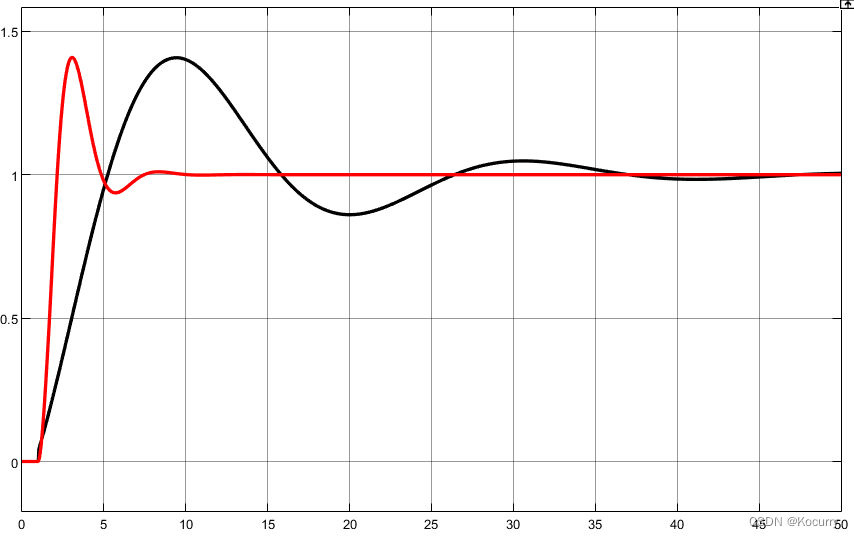
比较两种控制器仿真结果,红色曲线为自适应模糊PID控制方式的控制曲线,黑色曲线为常规PID控制方式的控制曲线,从曲线可以看出,自适应模糊PID控制方式在很短的时间内趋于稳定,效果更好。