文章目录
- 运行环境:
- 思路:
- 同步前和同步后效果对比
- 1.1创建工作空间
- 1.2创建功能包
- 2.1编写源文件
- 2.2编写头文件
- 2.3编写可执行文件
- 2.4配置文件
- 3.1编译运行
- 4.1录制时间同步后的rosbag
- 4.2rviz可视化rosbag
运行环境:
ubuntu20.04 noetic
usb_cam
速腾Robosense 16线
宏基暗影骑士笔记本
思路:
软同步:订阅相机和雷达原始数据,然后进行时间同步,最后将同步后的数据发布出去,通过rosbag record进行录制
同步前和同步后效果对比
同步前的话题:
/rslidar_packets
/usb_cam/image_raw
# 录制命令
rosbag record -O lidar_camera /usb_cam/image_raw /rslidar_points

同步后的话题:
/sync/img
/sync/lidar
# 录制命令
rosbag record -O lidar_camera_syn_time /sync/img /sync/lidar
1.1创建工作空间
mkdir -p sys_time_ws/src
cd sys_time_ws
catkin_make
code .
1.2创建功能包
1) 在工作空间src目录下创建功能包
sys_time
roscpp rospy std_msgs
2.1编写源文件
1)在 src 目录下新建文件 sub_and_pub.cpp
代码解释:
this 关键字指向类创建的对象
registerCallback 绑定回调函数,触发回调函数发布同步后的数据
#include "sys_time/sub_and_pub.h"
# 重写头文件中的构造函数subscriberANDpublisher()
# main函数初始化对象(subscriberANDpublisher sp)时自动调用构造函数
subscriberANDpublisher::subscriberANDpublisher()
{
//订阅话题
lidar_sub.subscribe(nh, "/rslidar_points", 1);
camera_sub.subscribe(nh, "/usb_cam/image_raw", 1);
//消息过滤器,使用 ApproximateTime 进行时间同步(允许一定程度的时间误差)
sync_.reset(new message_filters::Synchronizer<syncpolicy>(syncpolicy(10), camera_sub, lidar_sub));
sync_->registerCallback(boost::bind(&subscriberANDpublisher::callback, this, _1, _2));
//发布者
camera_pub = nh.advertise<sensor_msgs::Image>("sync/img", 10);
lidar_pub = nh.advertise<sensor_msgs::PointCloud2>("sync/lidar", 10);
}
void subscriberANDpublisher::callback(const sensor_msgs::ImageConstPtr& image, const sensor_msgs::PointCloud2ConstPtr& pointcloud) {
ROS_INFO("Received synchronized message!");
camera_pub.publish(image);
lidar_pub.publish(pointcloud);
}
2.2编写头文件
1)在功能包下的 include/功能包名 目录下新建头文件 sub_and_pub.h
2)配置 includepath 详情见
#ifndef SUB_AND_PUB_H
#define SUB_AND_PUB_H
//ros头文件
#include <ros/ros.h>
//时间同步
#include <message_filters/subscriber.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <message_filters/synchronizer.h>
//传感器消息
#include <sensor_msgs/Image.h>
#include <sensor_msgs/image_encodings.h>
#include <sensor_msgs/PointCloud2.h>
class subscriberANDpublisher{
public:
subscriberANDpublisher();
void callback(const sensor_msgs::ImageConstPtr &image, const sensor_msgs::PointCloud2ConstPtr &pointcloud);
private:
ros::NodeHandle nh;
ros::Publisher camera_pub;
ros::Publisher lidar_pub;
message_filters::Subscriber<sensor_msgs::PointCloud2> lidar_sub;//雷达订阅
message_filters::Subscriber<sensor_msgs::Image> camera_sub;//相机订阅
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::PointCloud2> syncpolicy;//时间戳对齐规则
typedef message_filters::Synchronizer<syncpolicy> Sync;
boost::shared_ptr<Sync> sync_;//时间同步器
};
#endif
2.3编写可执行文件
#include <ros/ros.h>
#include "sys_time/sub_and_pub.h"
int main(int argc, char **argv) {
ros::init(argc, argv, "node");
subscriberANDpublisher sp;
ROS_INFO("main done! ");
ros::spin();
}
2.4配置文件
1)修改CMakeLists.txt
# 添加message_filters ROS包依赖
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_filters
)
# 头文件路径
include_directories(
include
${catkin_INCLUDE_DIRS}
)
# 新建c++库,将头文件和源文件添加到新库里面
add_library(sys_time_lib
include/sys_time/sub_and_pub.h
src/sub_and_pub.cpp
)
# 将src目录下的main.cpp编译成可执行文件
add_executable(main.cpp src/main.cpp)
# 将新库和ros库链接起来
target_link_libraries(sys_time_lib
${catkin_LIBRARIES}
)
# 将可执行文件和新库链接起来
target_link_libraries(main.cpp
sys_time_lib
${catkin_LIBRARIES}
)
2)修改package.xml (实际上不修改也可以通过编译)
<exec_depend>message_filters</exec_depend>
3.1编译运行
1)运行时间同步节点
# 编译
ctrl+shift+b
roscore
source ./devel/setup.bash
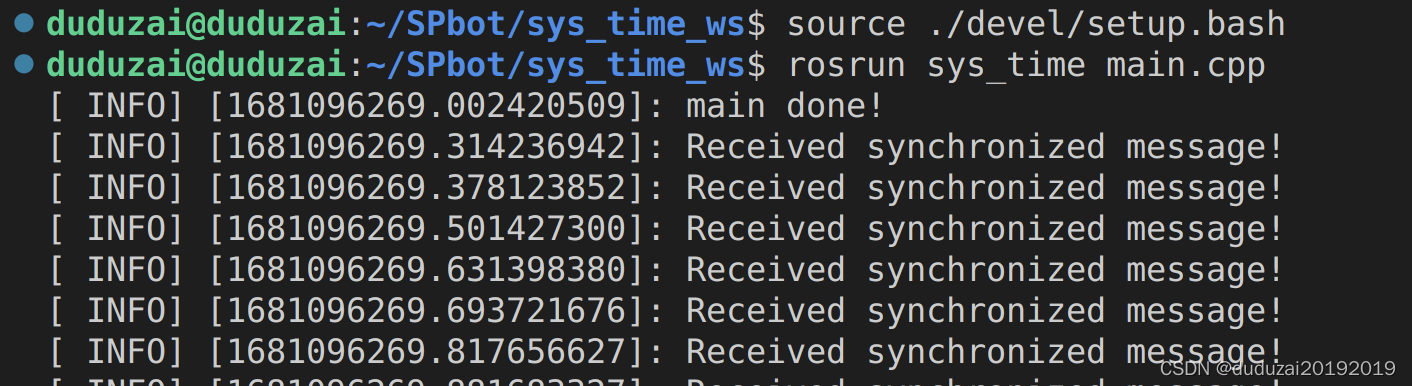
rosrun sys_time main.cpp

2)启动相机
cd usb_cam_ws
source ./devel/setup.bash
roslaunch usb_cam usb_cam-test.launch
3)启动雷达
cd robosense_ws
source ./devel/setup.bash
roslaunch rslidar_sdk start.launch
当相机雷达全部启动后,显示接受到时间同步消息
4.1录制时间同步后的rosbag
lidar_camera_syn_time 是保存的rosbag名称
/sync/img 和 /sync/lidar 是录制的话题名
rosbag record -O lidar_camera_syn_time /sync/img /sync/lidar
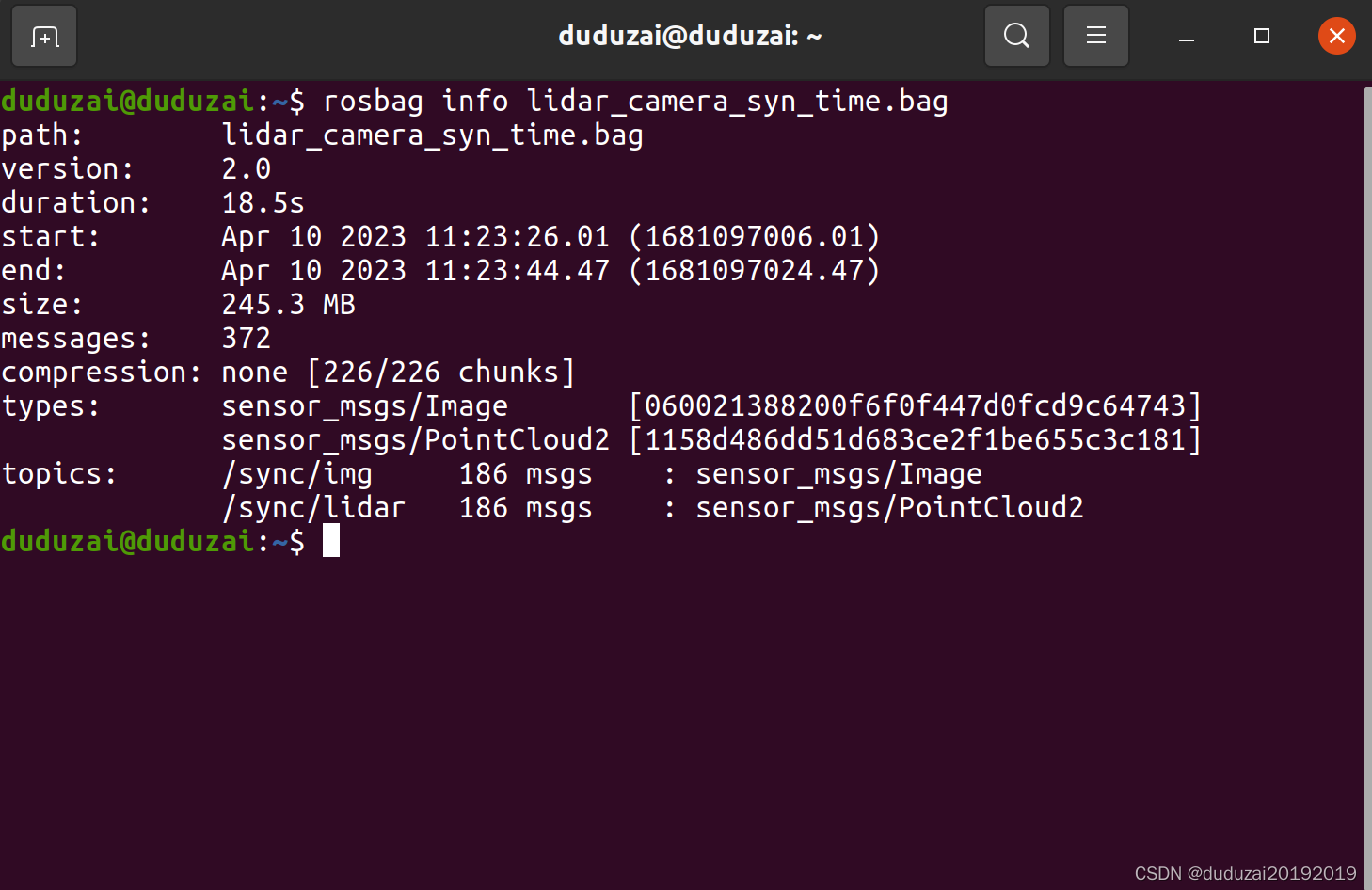
# 查看录制好的rosbag
rosbag info lidar_camera_syn_time.bag
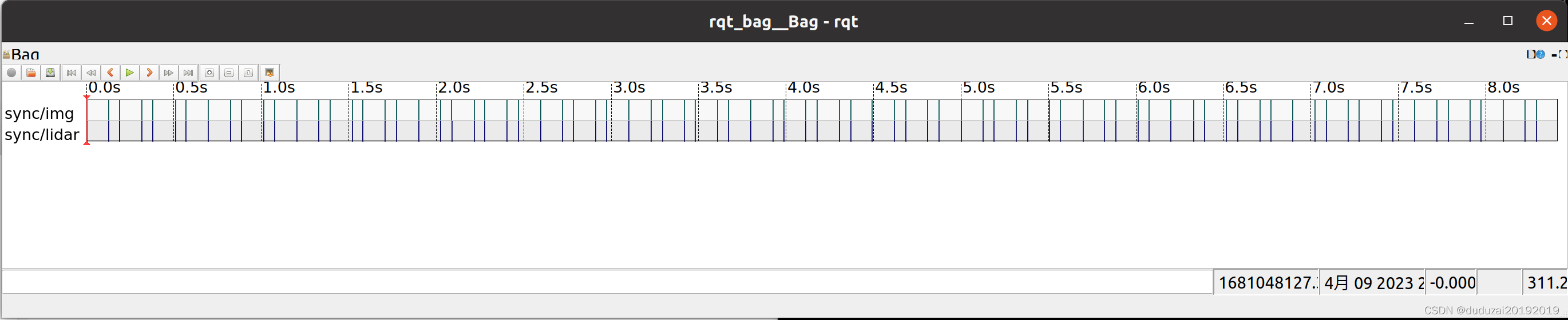
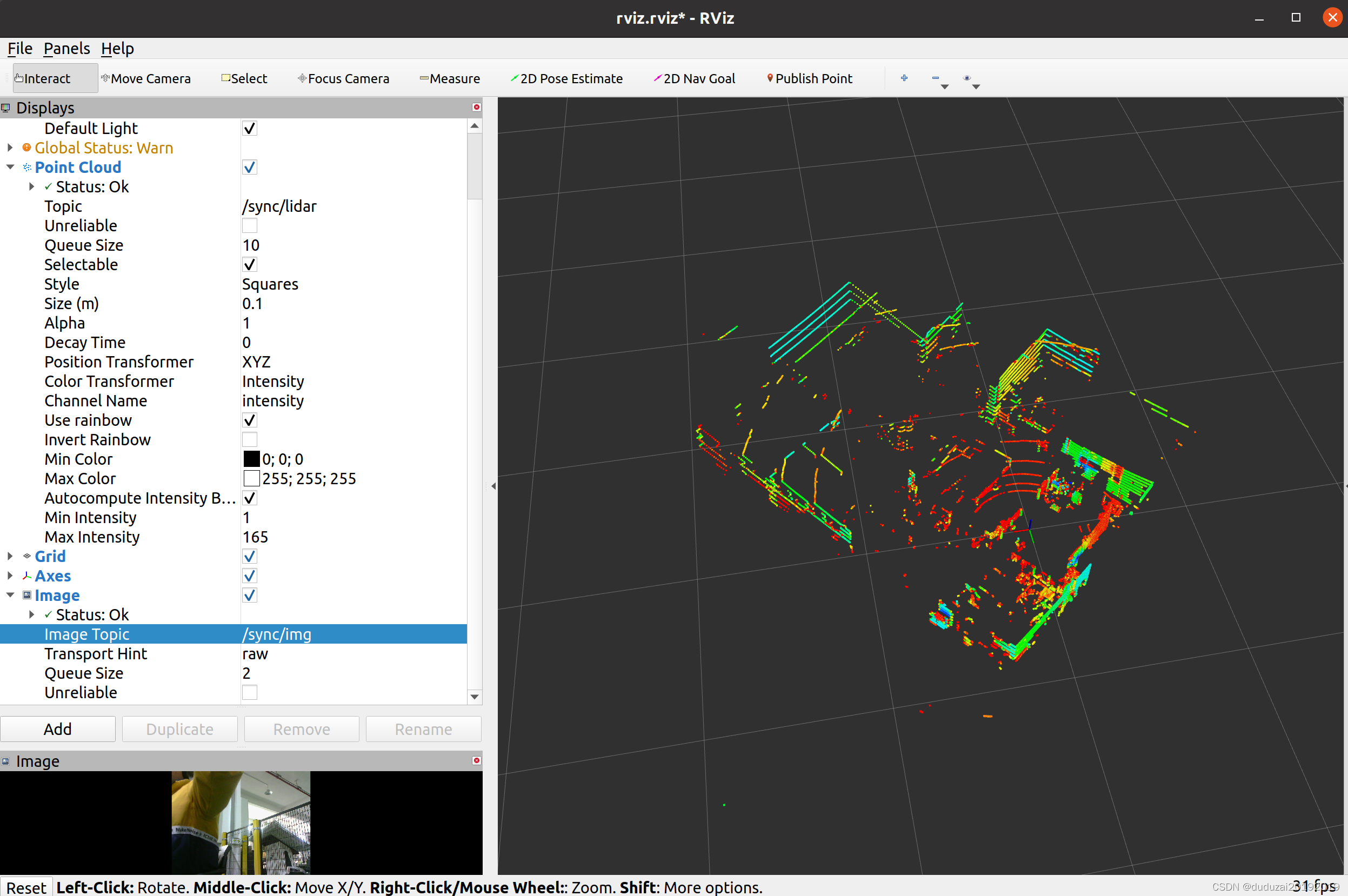
4.2rviz可视化rosbag
配置文件详细步骤见:Robosense激光雷达录制rosbag
1)打开rviz
rviz
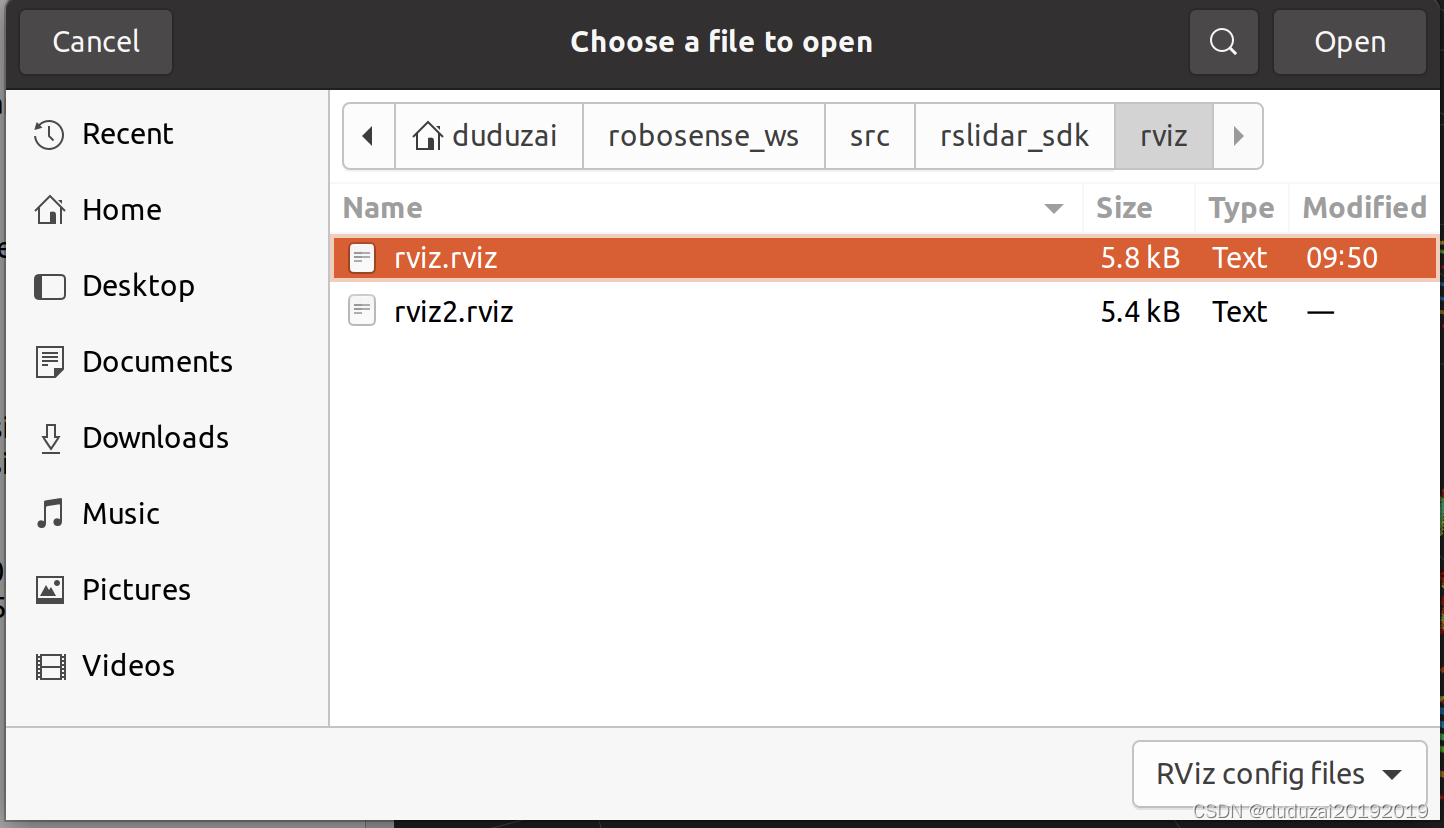
2)导入配置文件 file–open cofig
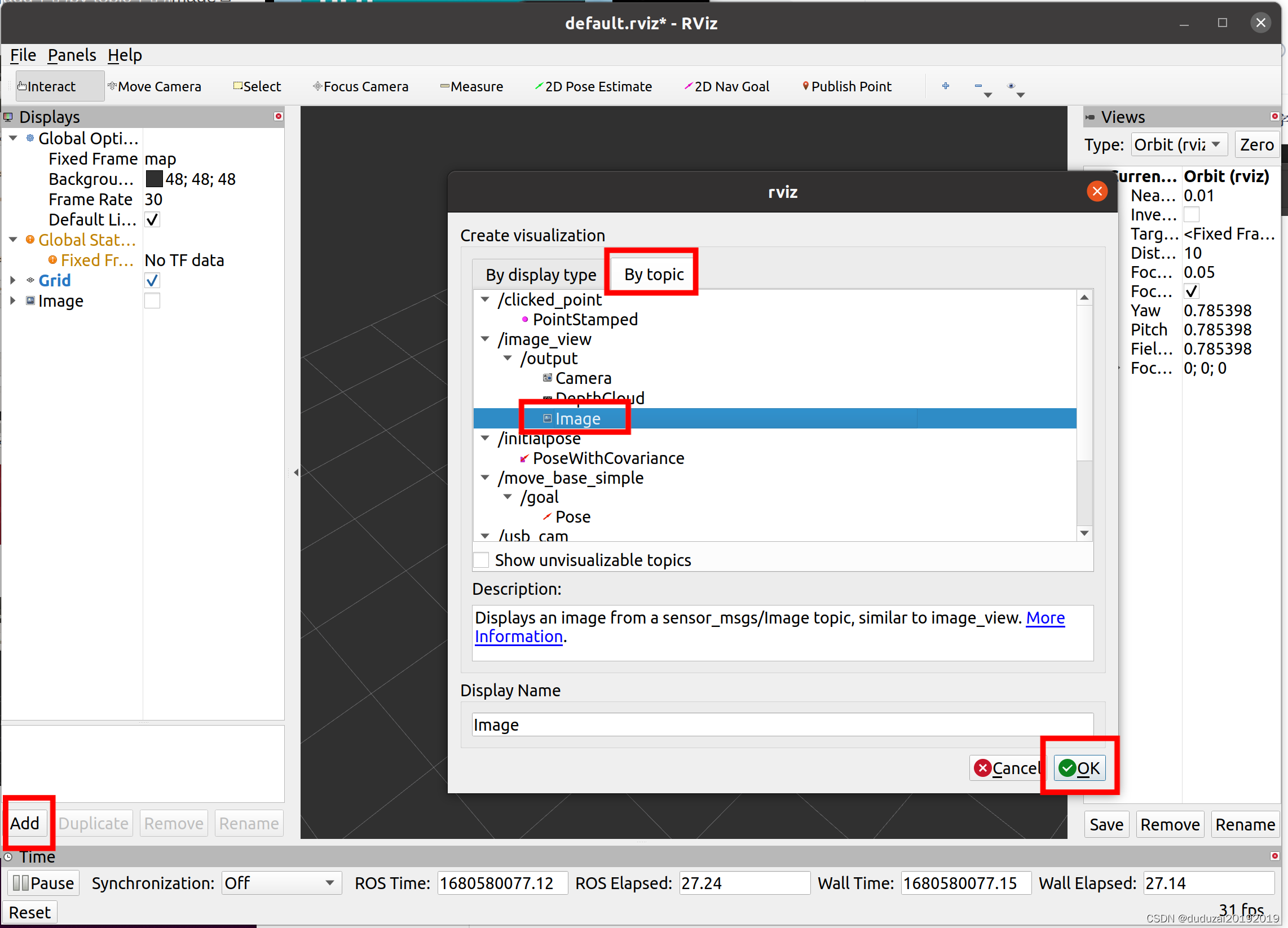
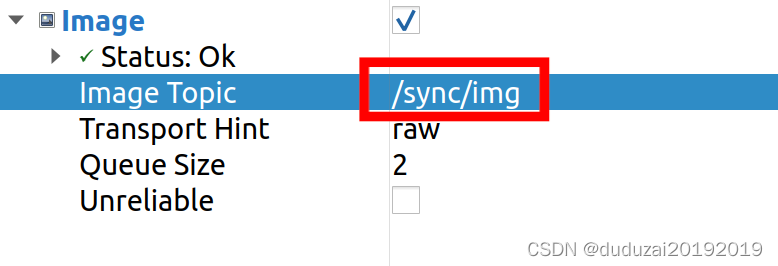
3)添加相机话题
4)播放rosbag
rosbag play lidar_camera_syn_time.bag







![[LeetCode解题报告] 1157. 子数组中占绝大多数的元素](https://img-blog.csdnimg.cn/b8d6f936e42c4123a6a04ea3303b15de.png)