无人车,要实现自动驾驶,首先要知道自己的的位置。更准确的说法是:相对某个坐标系,确定车辆的位置和姿态。
这个坐标系可以是局部的:

也可以是全局坐标系:
 这是更大维度上的坐标系。
这是更大维度上的坐标系。
坐标系确定之后,相对坐标原点和坐标轴,车上坐标系(本地坐标系),平移得到位置(x,y,z),旋转得到姿态(航向Yaw、横滚Roll、俯仰Pitch)。
有了局部和全局的认识后,看下怎么具体定义一个坐标系、有哪些坐标系。之所以有那么多坐标系,是因为有很多的场景,在不同的场景下去描述,就产生了不同的坐标系。
坐标系的建立或者说选择,应考虑两个方面的因素:
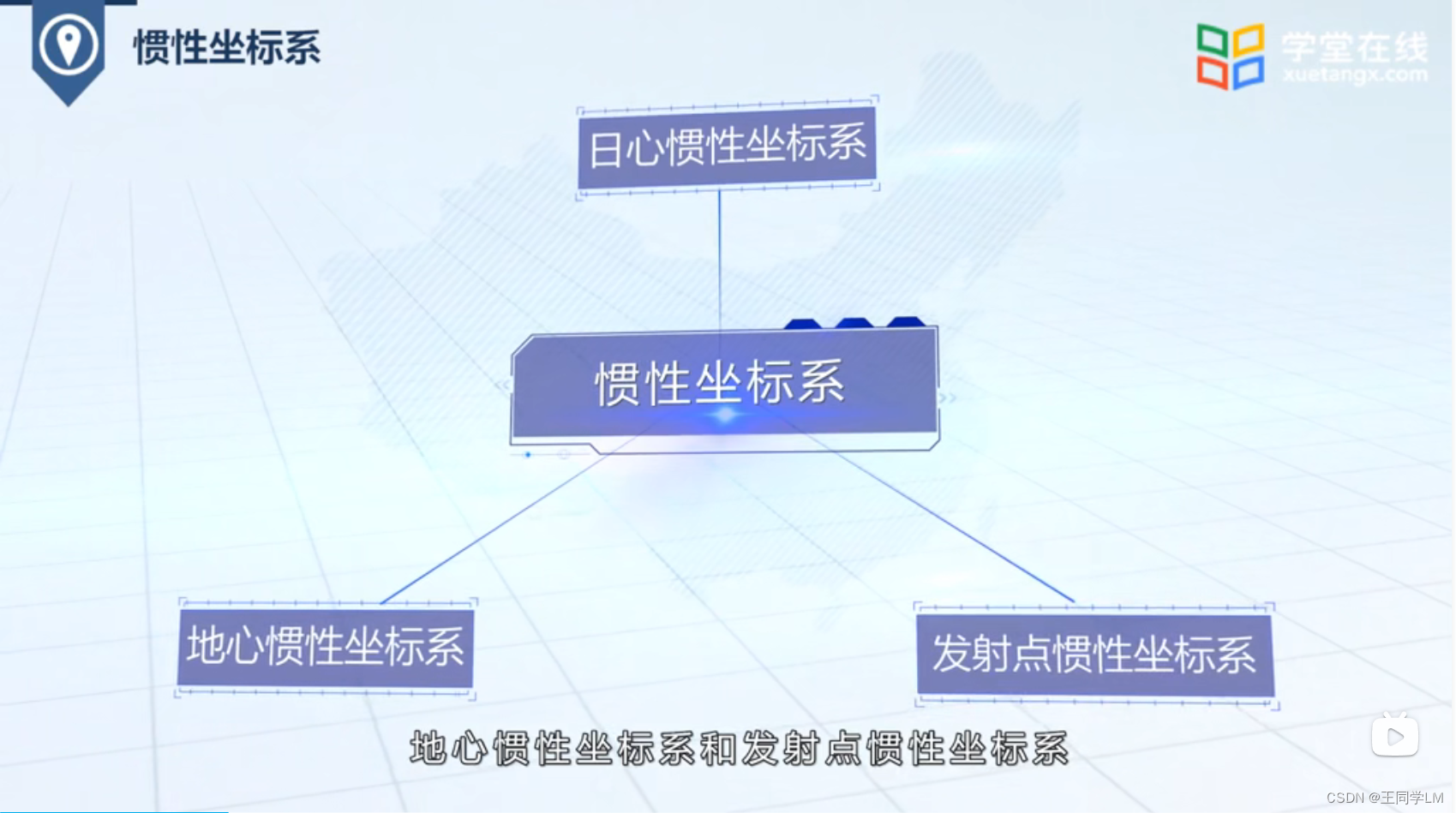
一、惯性系