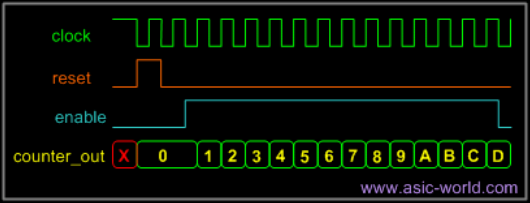
机械手臂系统
Shadow机械手臂系统是由美国Shadow Robot Company开发的一款高精度机械手臂系统,主要用于工业自动化、医疗器械、科学研究等领域。Shadow机械手臂系统采用了多自由度的设计,可以实现高精度的三维运动和灵活的操作,其控制系统还支持多种编程语言和软件平台,方便用户进行开发和定制。
Shadow机械手臂系统的核心部件是机械手臂,其设计基于人类手臂的结构,具有多个关节和自由度,可以实现各种复杂的运动。机械手臂采用了高精度的传感器和控制算法,可以实现毫米级的精度和微米级的分辨率,可以满足高精度操作的需求。
Shadow机械手臂系统还配备了控制器和软件平台,可以支持多种编程语言和操作系统,如C++、Python和ROS等。用户可以通过编写程序和调用API接口,实现机械手臂的自动化控制和定制化操作。此外,Shadow机械手臂系统还提供了可视化界面和远程控制功能,方便用户进行远程操作和监控。
总的来说,Shadow机械手臂系统是一款高精度、灵活、可定制的机械手臂系统,可以满足各种复杂的操作需求,广泛应用于工业自动化、医疗器械、科学研究等领域。
硬件平台主要由一套具有26个自由度的Shadow Robot公司的灵巧机械手臂操纵系统组成,该系统拥有类似人类上肢运动的功能,系统中的每个关节都有力控制和位置控制两种控制方式,每个关节都能够逆向驱动, 且能向主控制器提供力反馈信号。
硬件平台另外也包括一套能够捕捉当前场景色彩和深度图像信息的三维视觉传感器,它可以和用户的EEG控制信号一同使用,提供更佳的操作性能。这些组件将通过一台高性能计算机连接在一起,协同工作。
软件平台基于运行于Ubuntu linux之上的ROS (http://wiki.ros.org/,机器人操作系统) ,机械臂高级路径规划将使用MoveIt (https://moveit.ros.org/)。用户可以自主选择系统的某部分由自动控制完成还是由物体识别,机械臂运动规划及避障等分别完成。
ROS(robot operating system)是一款开源的、通用的机器人软件的开发平台,该机器人软件项目起源于2007年斯坦福大学人工智能实验室STAIR项目和机器人技术公司Willow Garage的个人机器人项目(Personal Robots Program)之间的合作.经过几年的发展,ROS已成为世界上应用范围最广的通用机器人软件开发平台。
该操作平台最大的特点是:
通用性:目前,世界上每年都有好几十家的机器人研发机构及机器人的制造公司宣布所开发的机器人支持ROS,这意味着全世界的越来越多的机器人设计者已把ROS做为标准的机器人的开发平台。
开源性:在ROS的官方网站上提供大量开源的机器人应用程序供使用者下载使用,机器人的开发者可以非常方便了解和从事机器人研究领域前沿课题。
复用性: ROS模块化开发环境使得程序的复用性成为可能,机器人开发者可以非常方便的复用前人已开发完成的程序,同时更能专注新增功能的开发。
社区性:目前在ROS官方论坛上已聚集了大量的全世界的机器人开发者,大家共同讨论,共同开发,使的机器人开发工作变得更为简单与方便。
硬件:Shadow灵巧手臂操作系统
Shadow灵巧手是一款先进的类人机械手系统,同时是世界上最灵巧的机械手,最大限度的再现人手的灵活。它能够提供和人手相媲美的力量输出和运动精度。
Shadow机械手系统已广泛用于抓取,操纵,神经控制,脑肌电接口,工业质量控制及危险物质处理等方面。Shadow灵巧手是一个自持系统,所有的执行和传感机构都集中在手和前臂里面。
Shadow所有类型的机械手都使用EtherCAT现场总线技术,提供基于以太网的高达100Mbps的全双工通讯,且此功能已集成进ROS。
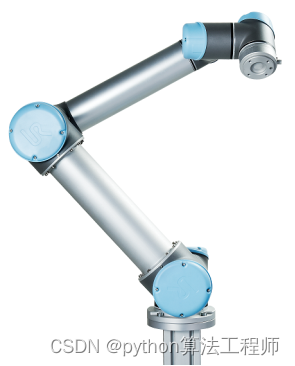
Shadow Robot公司的UR10机械臂是一款8自由度的轻量级、高精度并具有安全协作功能的机械臂,是Shadow灵巧手的理想平台。它内置关节力矩传感器,一旦碰到障碍物,能够立即自动停止,因此能够很安全的在人们身边工作。
通过MoveIt的先进路径规划技术, Shadow 的UR10 机械臂能够完成包括避障及动态安全配置在内的完整路径规划。
Xtion 3D彩色深度传感器能为系统提供高速率、高分辨率的三维数据,这些数据以点云的形式呈现,经处理后可以得到物体的位置和颜色信息,以供机器人的运动规划库使用。
系统参数
系统总自由度 26
手自由度 18
臂自由度 8
长度 1748mm
手指数量 5
指尖输出力
手指运动范围 270°
手关节角速度
传感器检测精度
抓取速度 1Hz
末端速度 1 m/s
末端精度 +/- 0.1 mm
最大负载 5kg
额定负载 2.5kg
重量 33.2kg
输入电源 220V AC/48V DC
传感器 关节位置传感器
指尖处决传感器
关节力传感器
电机温度
电机电流
手指关节位置精度 0.2°
驱动器 无刷直流电机
控制方式 位置、力
总线 Ethernet/EtherCAT
编程语言 C++, Python
视觉范围 0.8-3.5m
深度摄像头分辨率 VGA (640x480) : 30 fps
彩色摄像头分辨率 SXGA (1280*1024)
控制环境 机器人操作系统
系统实际图

部件实际图片


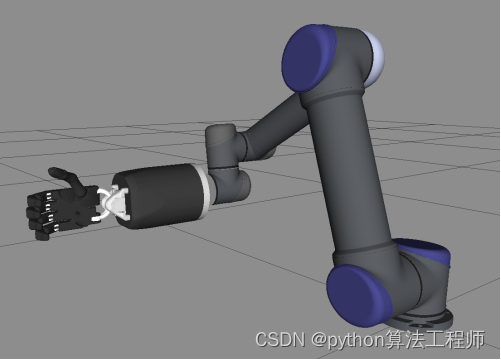
系统虚拟模型

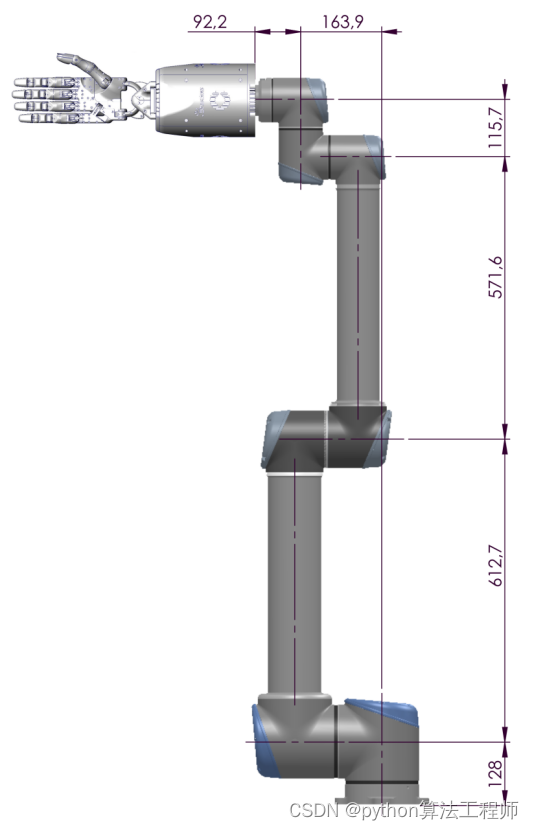
系统尺寸图(单位毫米)
灵巧手尺寸图(单位毫米)

灵巧手关节运动学图(单位毫米)

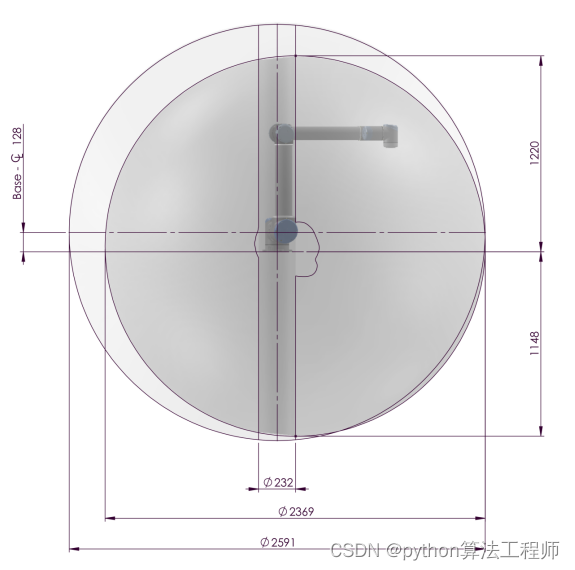
机械臂动作范围图
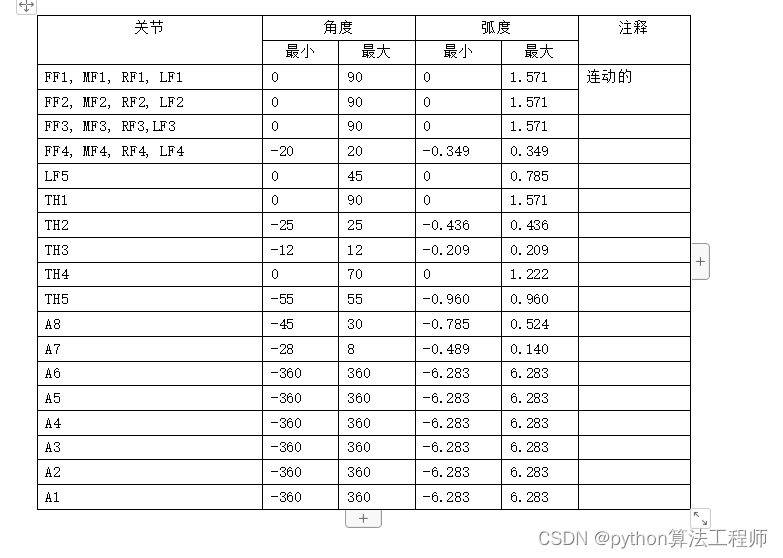
手部关节动作范围表格