文章目录
- 0、引言
- 1、rqt工具
- 2、RViz工具
- 3、Gazebo工具
0、引言
笔者因研究课题涉及ROS开发,学习了古月居出品的ROS入门21讲,为巩固可视化工具的知识,本文将ROS的常用可视化工具使用一讲内容进行总结。
1、rqt工具
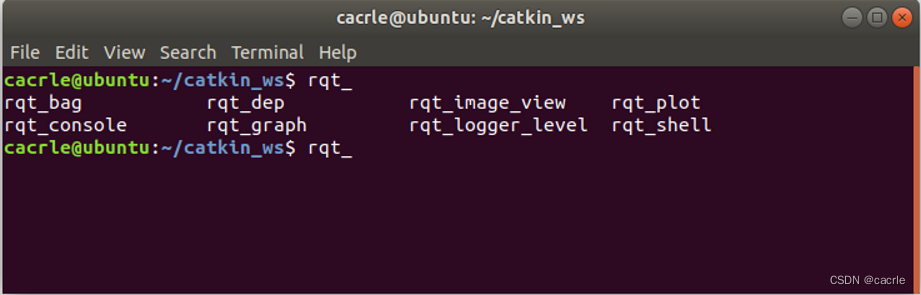
在终端输入:rqt_,再点击TAB键,可以查看包含该前缀的工具。
使用rqt工具需要先启动roscore,终端键入:roscore。
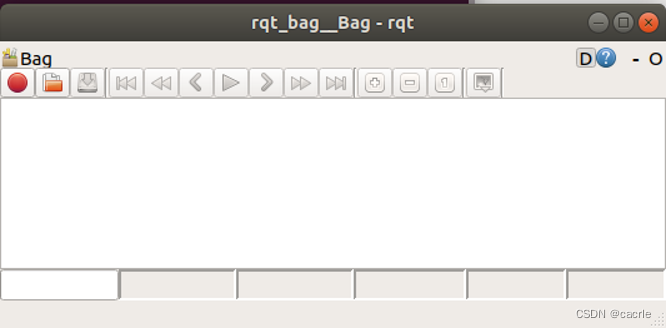
①rqt_bag:可以将数据记录并保存,在需要时重新发布数据。
②rqt_dep:查看ROS包依赖。
③rqt_image_view:用于图片显示。
④rqt_plot:将话题发布的消息进行可视化,但只能显示二维消息,比如物体在平面内的运动轨迹的坐标集,也就是xy坐标系。是ROS中专用于数据绘制的工具。
⑤rqt_console:属于ROS日志框架(logging framework)的一部分,用来显示节点的输出信息。
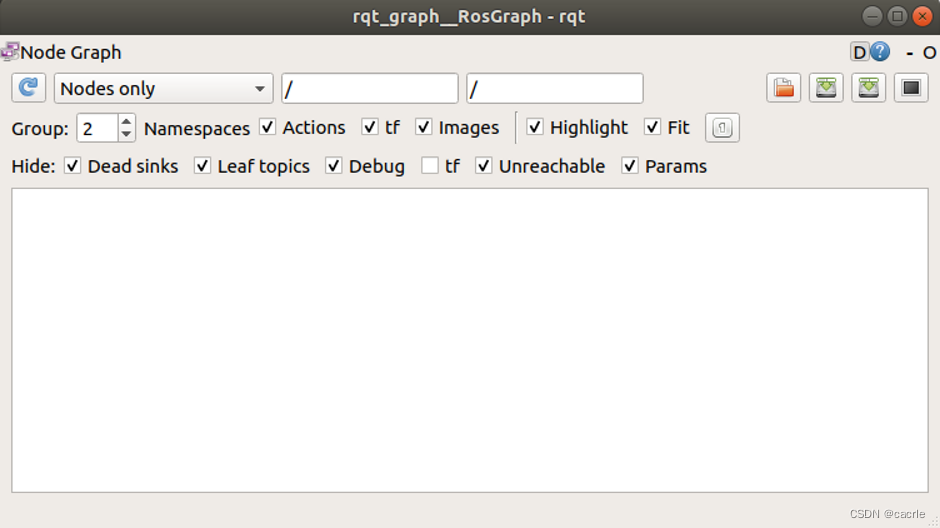
⑥rqt_graph:能够创建一个显示当前系统ROS程序运行情况的动态图形,ROS分布式系统中不同进程需要进行数据之间的交互,计算图可用点的网络形式表现数据交互过程。
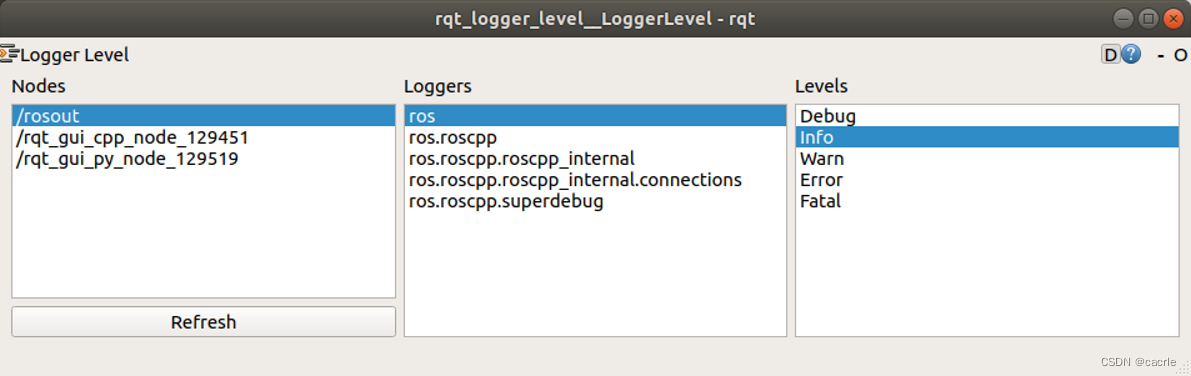
⑦rqt_logger_level:允许修改节点运行时输出信息的日志等级(logger levels)(包括 DEBUG、WARN、INFO和ERROR)。
⑧rqt_shell:用于输入shell命令进行控制。
2、RViz工具
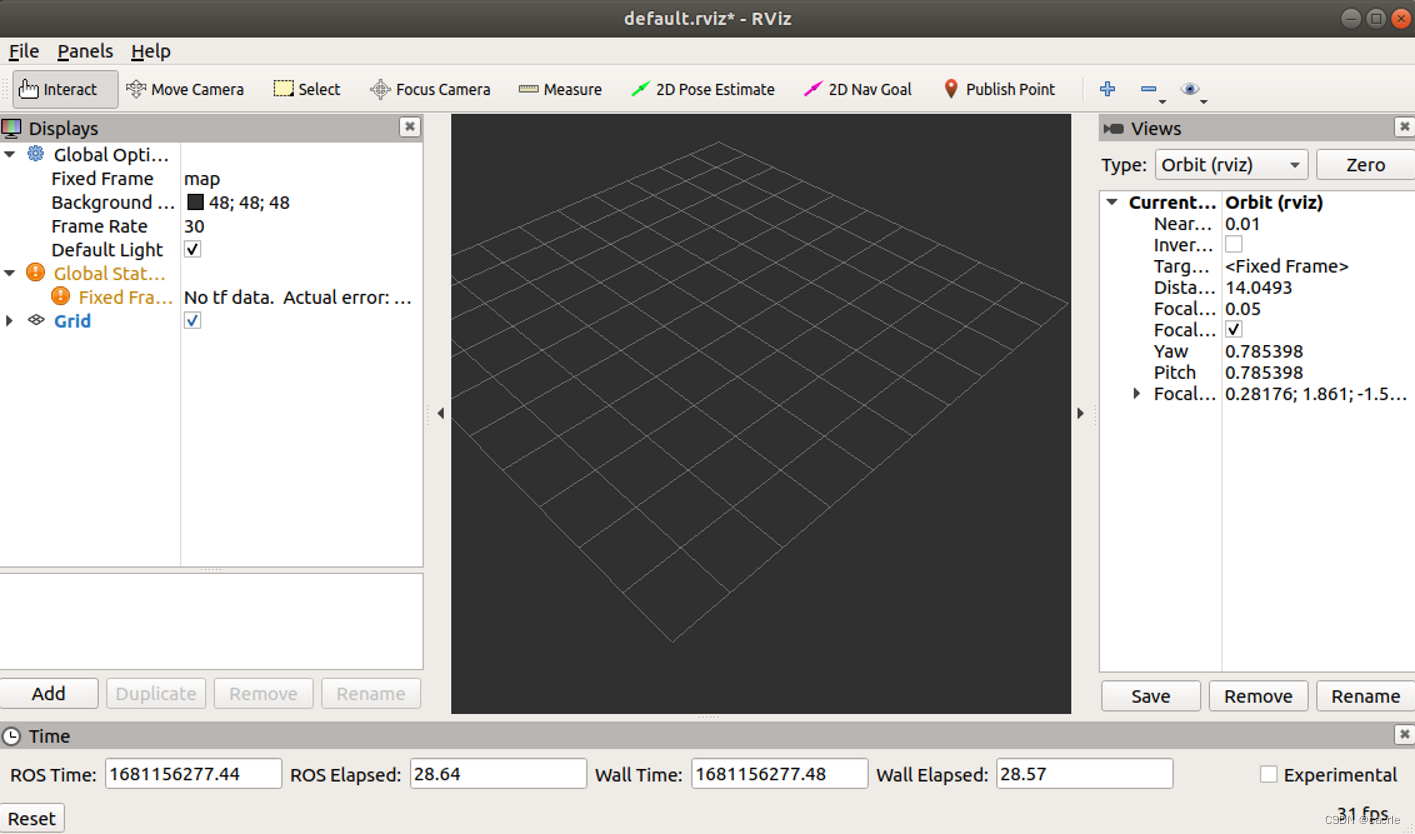
RViz是一款三维可视化工具,可以很好的兼容基于ROS软件框架的机器人平台。
特点:
①可以使用可扩展标记语言XML对机器人、周围物体等任何实物进行尺寸、质量、位置、材质、关节等属性的描述,并且在界面中呈现出来;
②可以通过图形化的方式,实时显示机器人传感器的信息、机器人的运动状态、周围环境的变化等信息。
一个终端键入:roscore,另外一个终端键入:rviz,打开该工具。
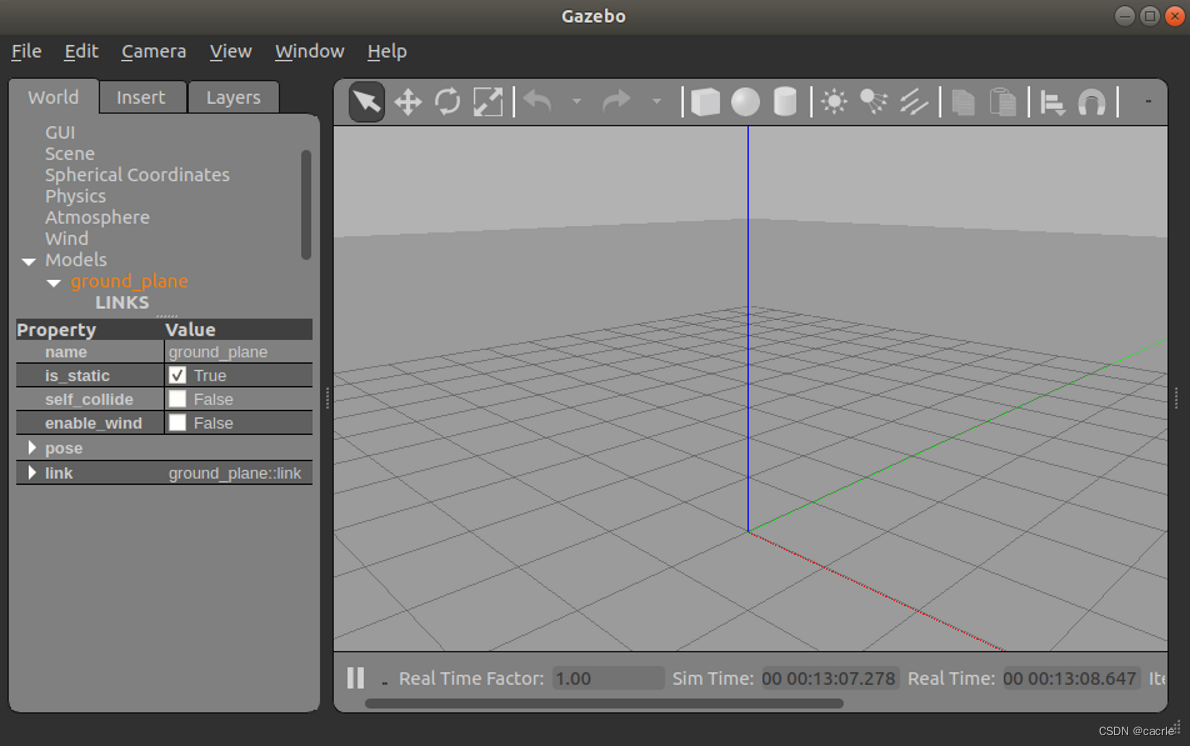
3、Gazebo工具
Gazebo是一款三维物理仿真平台,应用于测试机器人算法、机器人设计、现实情景下的回溯测试。
特点:
①具备强大的物理引擎;
②高质量的图形渲染;
③方便的编程与图形接口;
④开源免费。
终端键入:gazebo,打开该工具。
参考资料:
[1] 古月居GYH. 【古月居】古月·ROS入门21讲 | 一学就会的ROS机器人入门教程; 2019-07-16 [accessed 2023-04-11].
[2] 学无止境的小龟. ROS小工具学习与使用; 2022-11-06 [accessed 2023-04-11].
[3] 盒子君~. 第十一篇:ROS的rqt工具箱; 2022-12-14 [accessed 2023-04-11].
[4] Open-AI. ROS计算图——rqt_graph; 2022-08-02 [accessed 2023-04-11].
[5] 超爱嵌入式. ROS学习笔记-rqt_plot工具的使用; 2021-05-13 [accessed 2023-04-11].
[6] jcsm__. ROS学习笔记——rviz的基本介绍; 2020-03-28 [accessed 2023-04-11].
[7] kevin_chan04. 三 机器人仿真软件Gazebo介绍; 2017-11-07 [accessed 2023-04-11].