目录
前言
1. 1/4悬架系统
1.1数学模型
1.2仿真分析
2. 1/2悬架系统
2.1数学模型
2.2仿真模型
2.3仿真分析
3. 整车悬架系统
3.1数学模型
3.2仿真分析
参考文献
前言
前面几篇文章介绍了LQR、SkyHook、H2/H∞控制,接下来会继续介绍滑模、反步法、MPC、ADRC等等控制内容,以及结合模糊、神经网络、观测器等,并且将其贯穿2、4、7自由度的悬架系统,本篇先来简单介绍一下PID在整车悬架上的仿真分析。
1. 1/4悬架系统
1.1数学模型
![]()
![]()

这里不再做过多的介绍了,往期有一个合集文章介绍了:
半车(前后、左右)、整车悬架详细推导建模和simulink仿真分析_半车动力学模型_Mr. 邹的博客-CSDN博客
1.2仿真分析

2. 1/2悬架系统
2.1数学模型

2.2仿真模型
2.3仿真分析
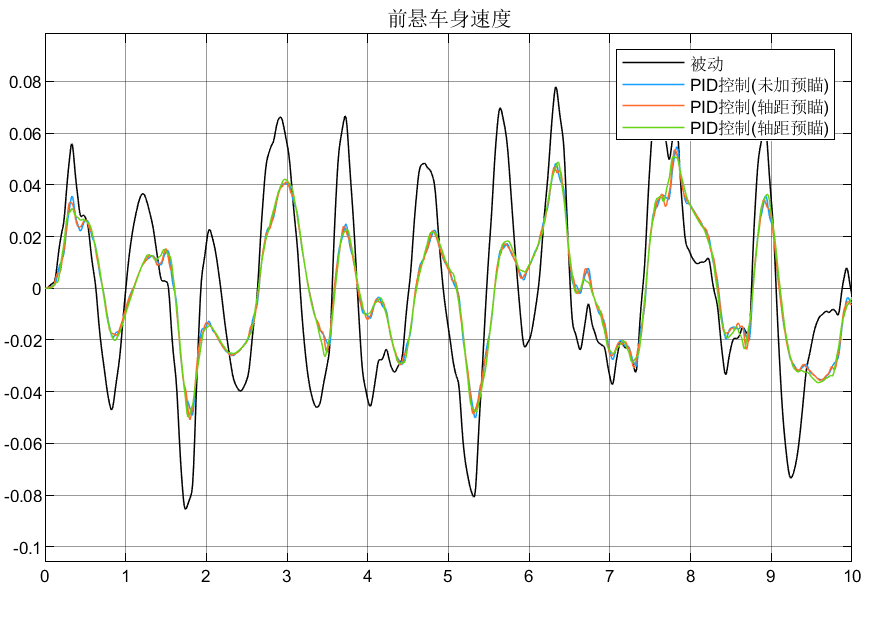
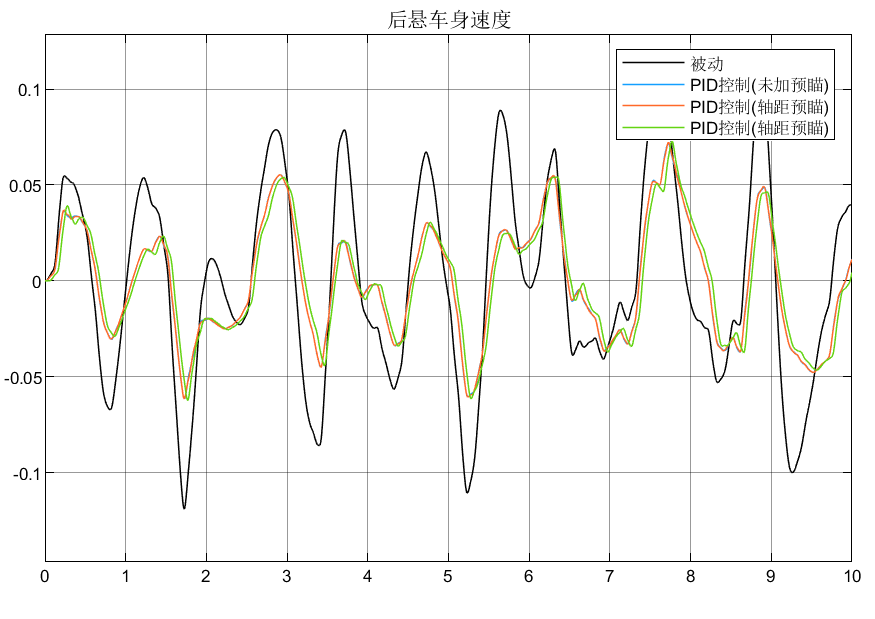
这里引入轴间预瞄和轴距预瞄进行优化:


3. 整车悬架系统
3.1数学模型
整车7自由度主动悬架数学模型

簧载垂向运动方程:
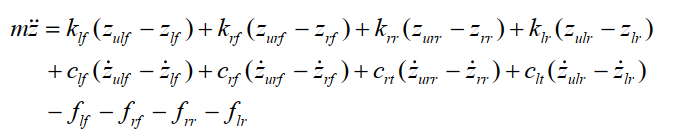
侧倾运动方程为:

俯仰运动方程为:

非簧载质量垂向运动方程为:

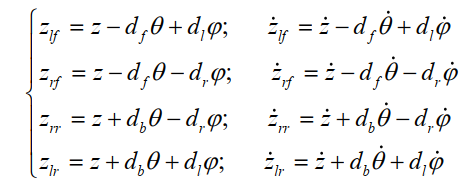
做出俯仰角θ和侧倾角φ很小的假设,所以有如下近似条件:
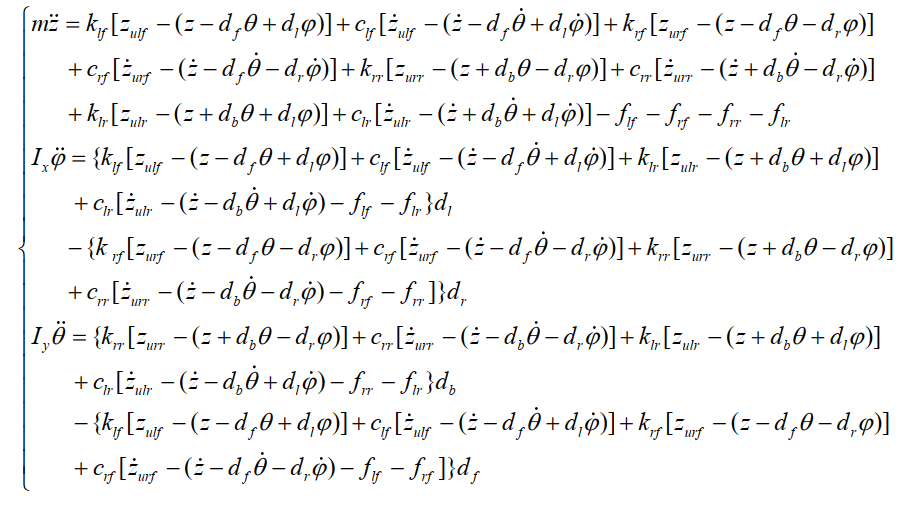
整理汇总得:

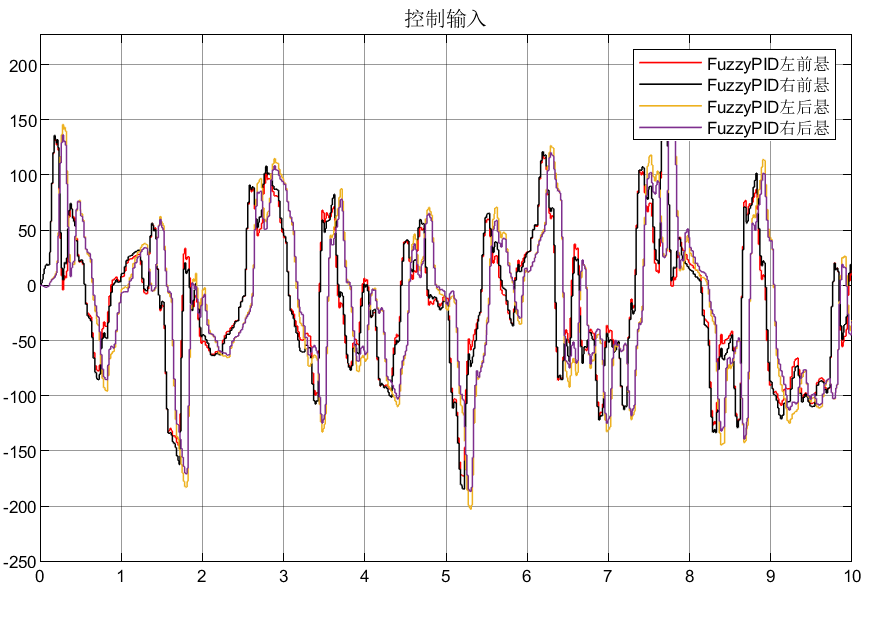
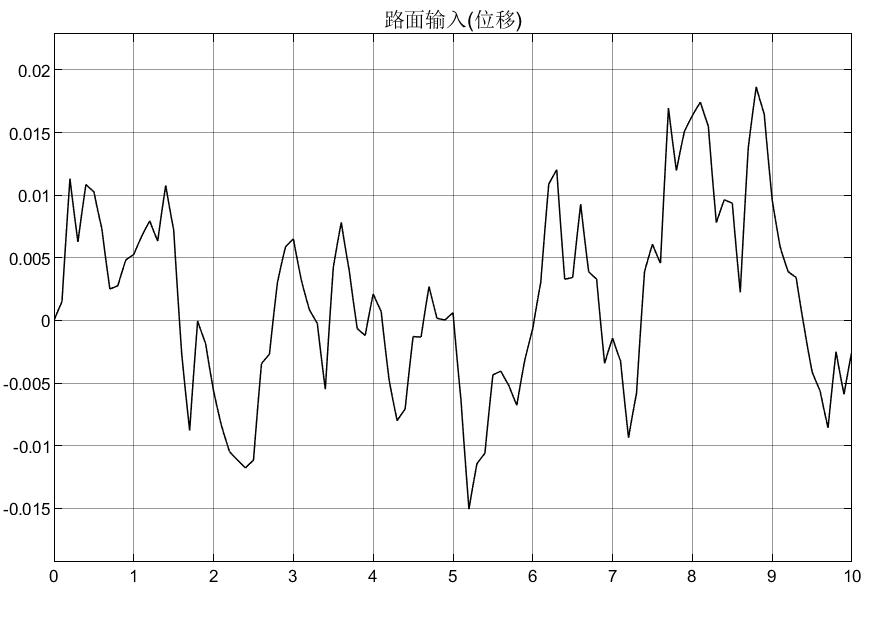
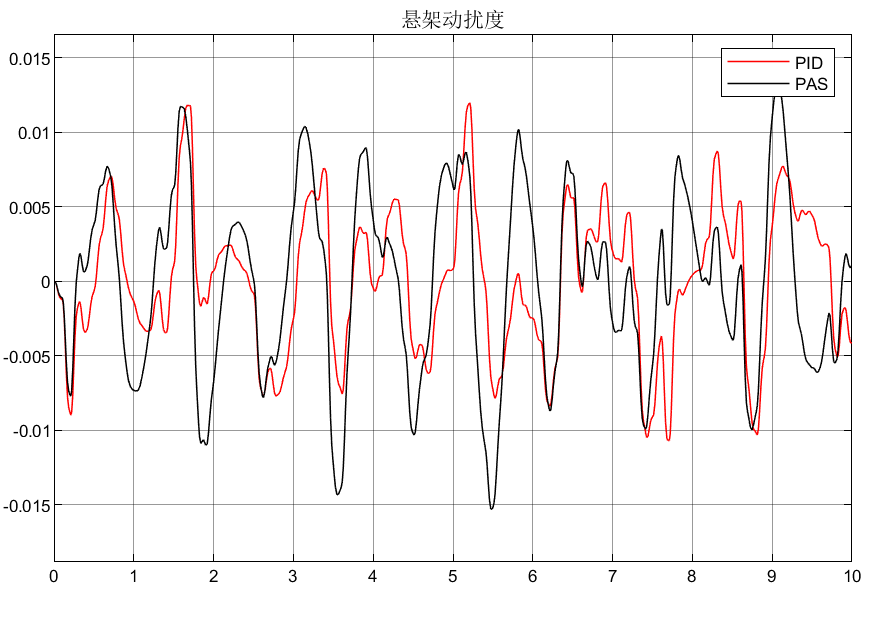
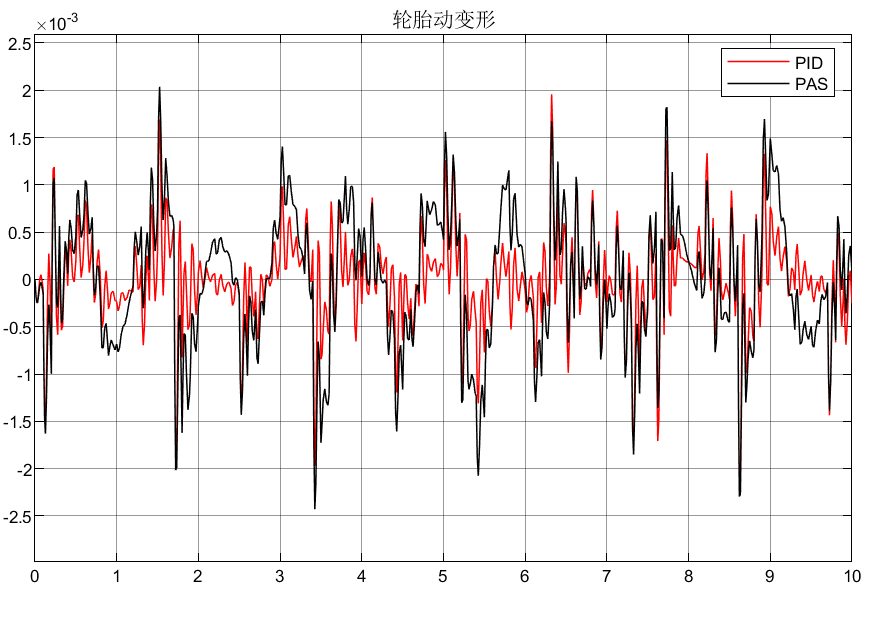
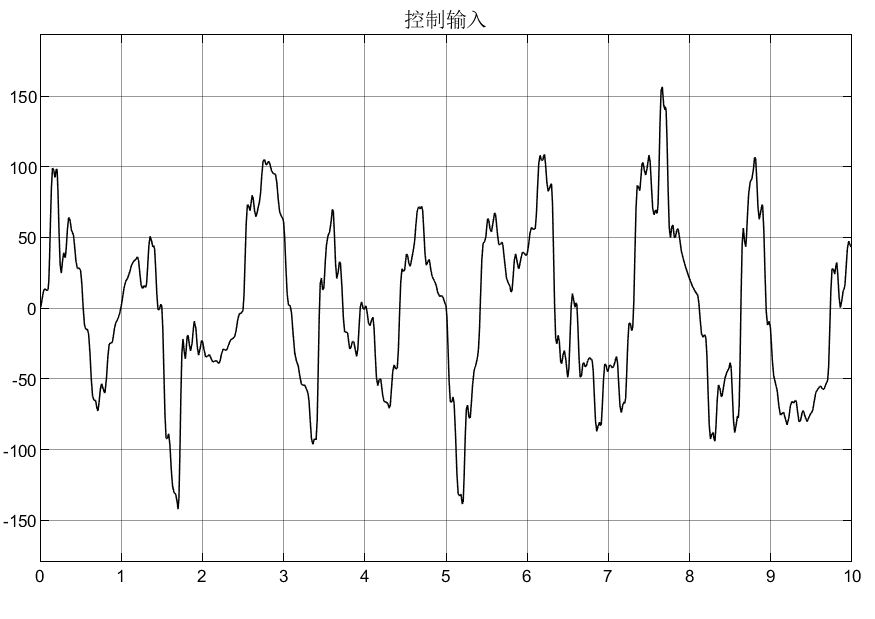
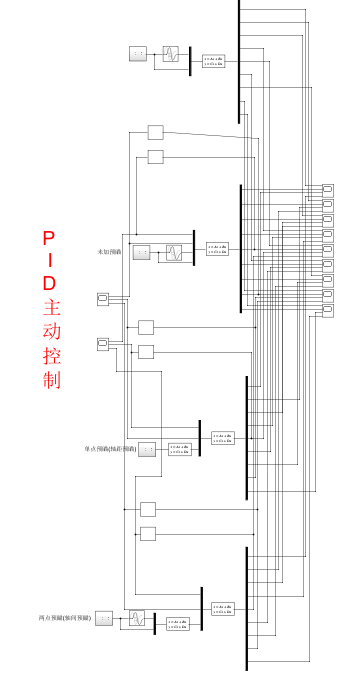
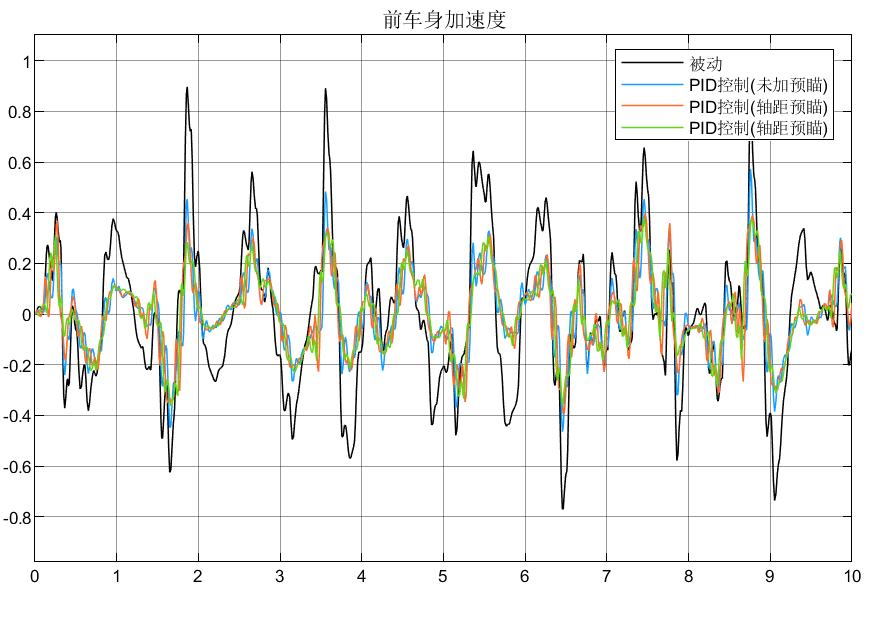
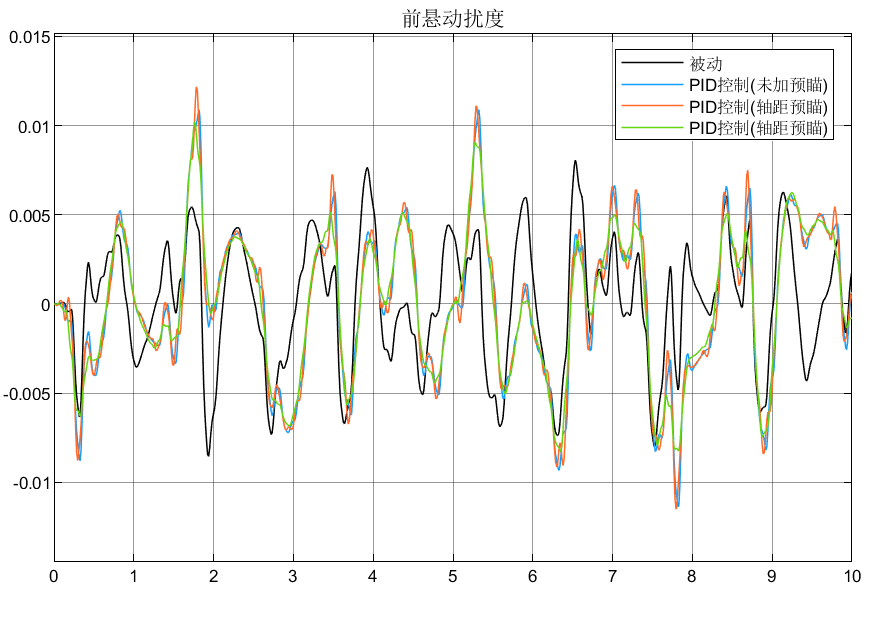
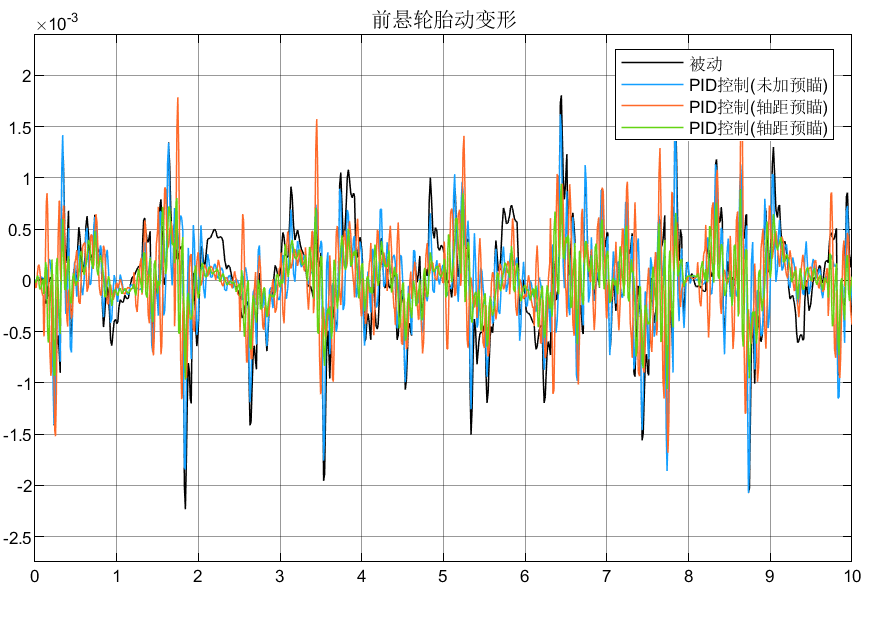
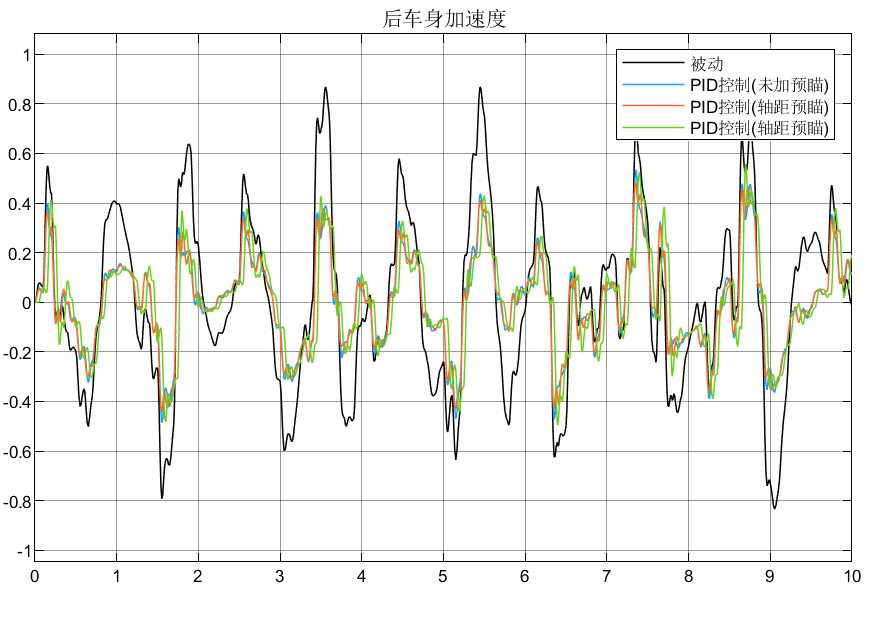
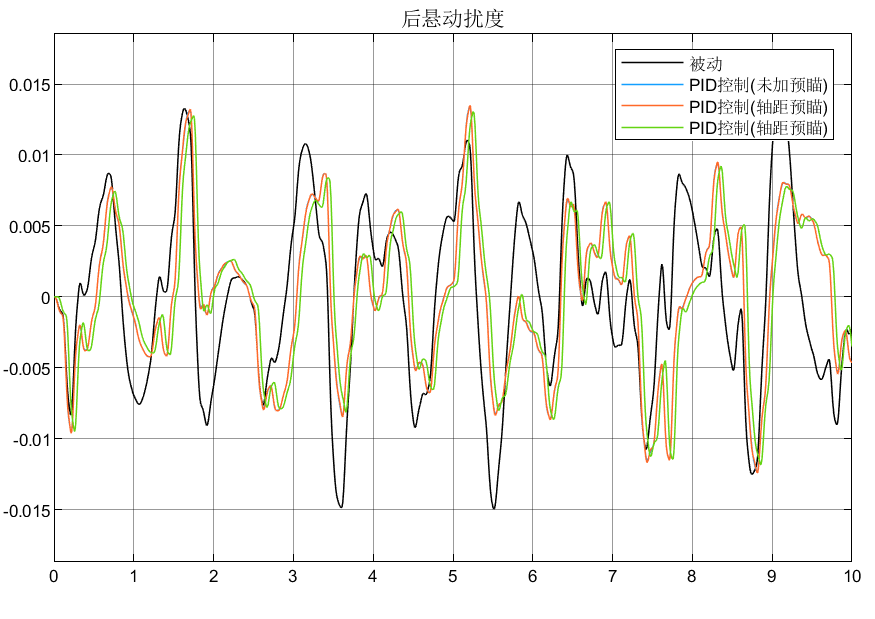
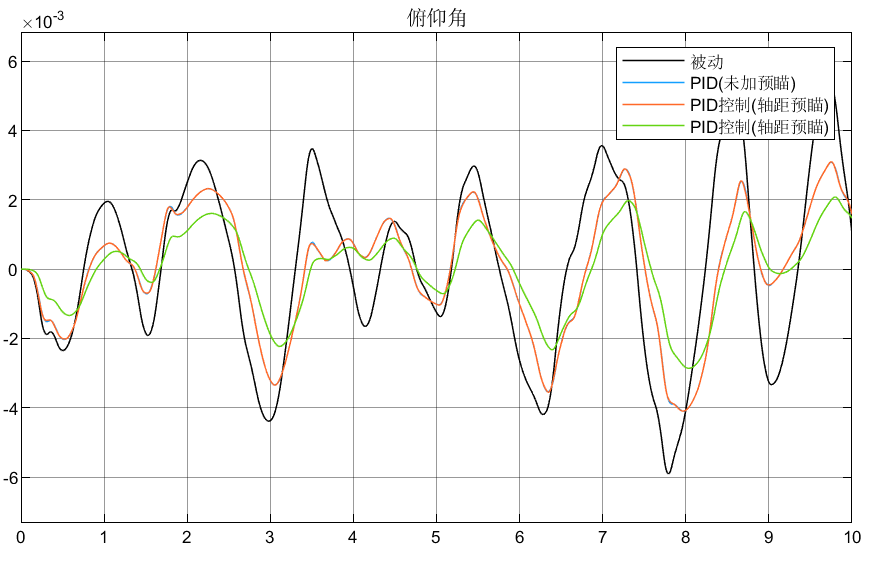
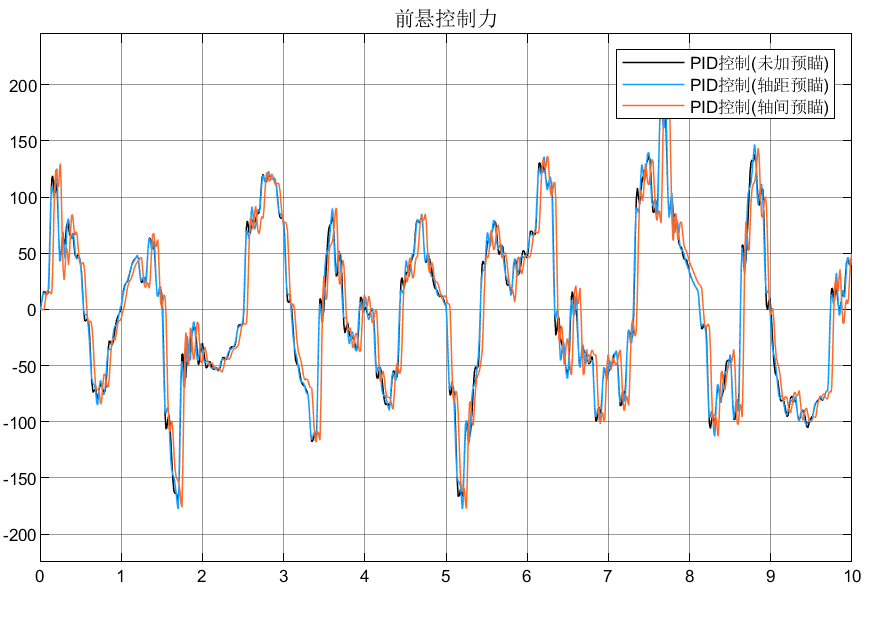
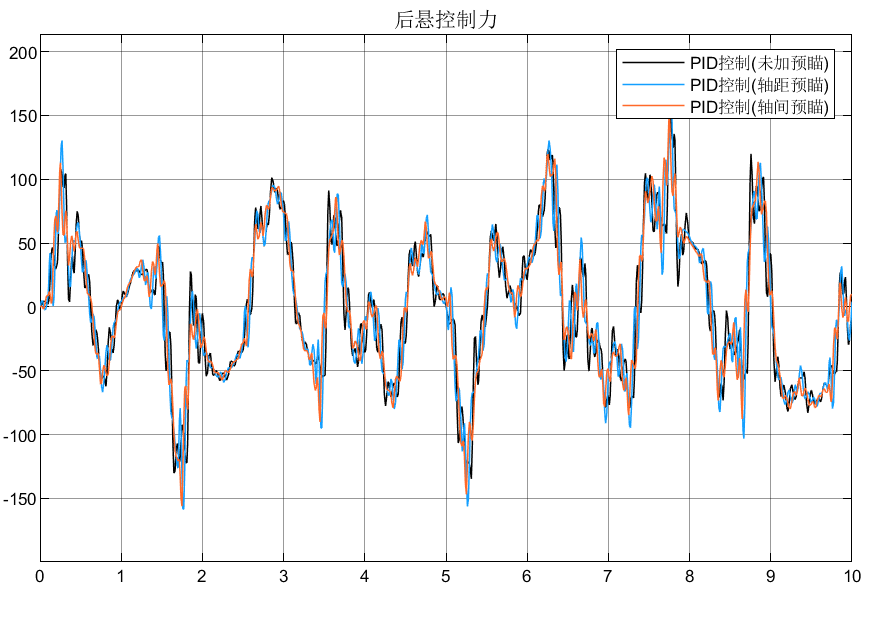
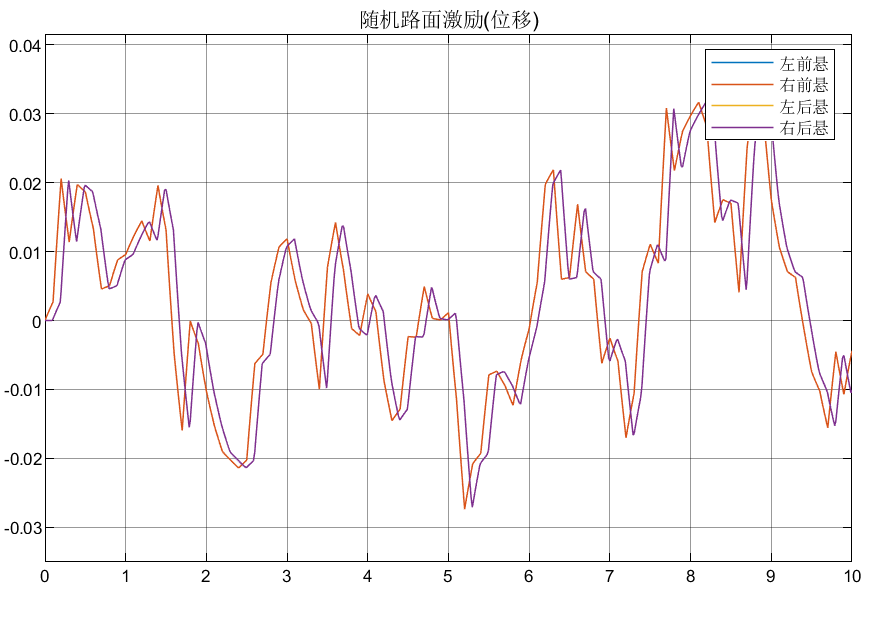
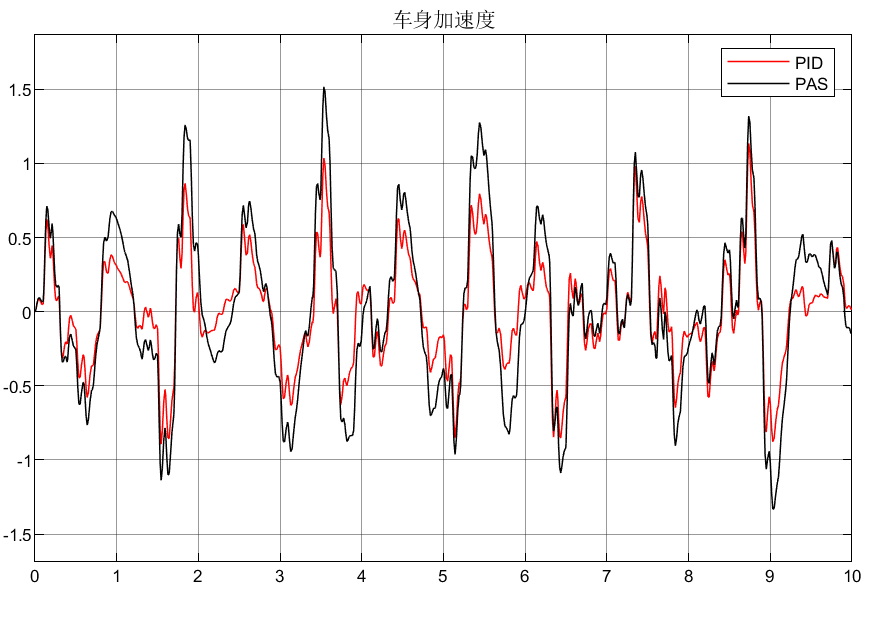
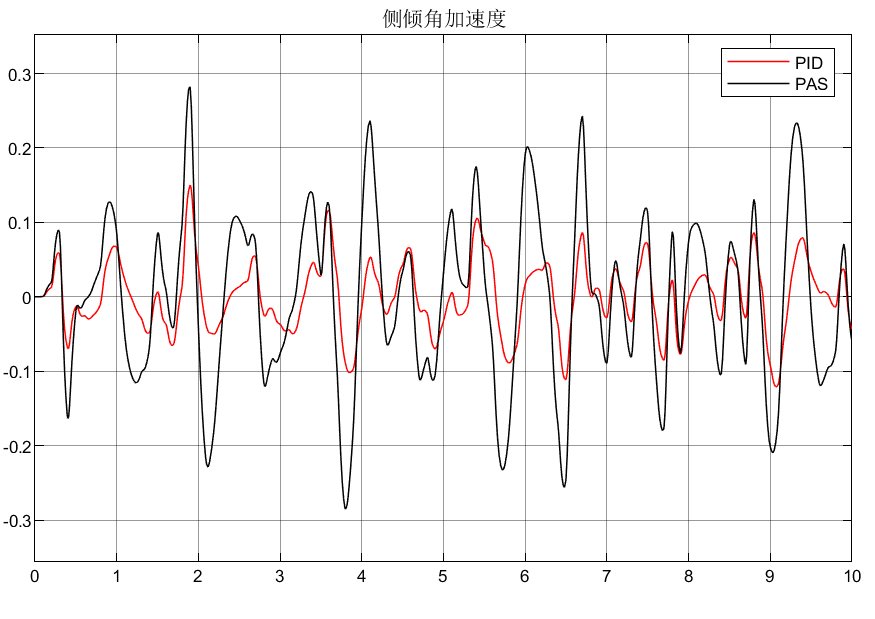
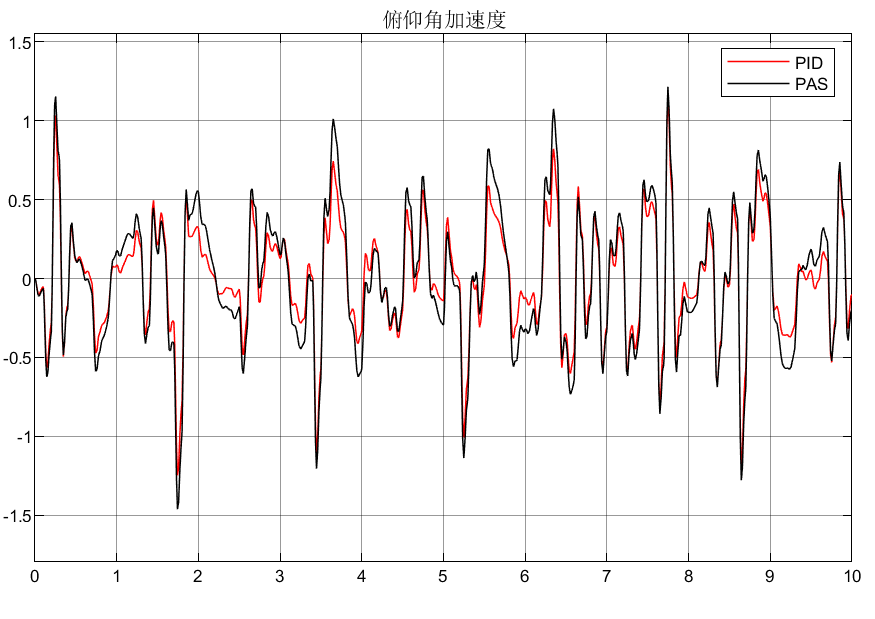
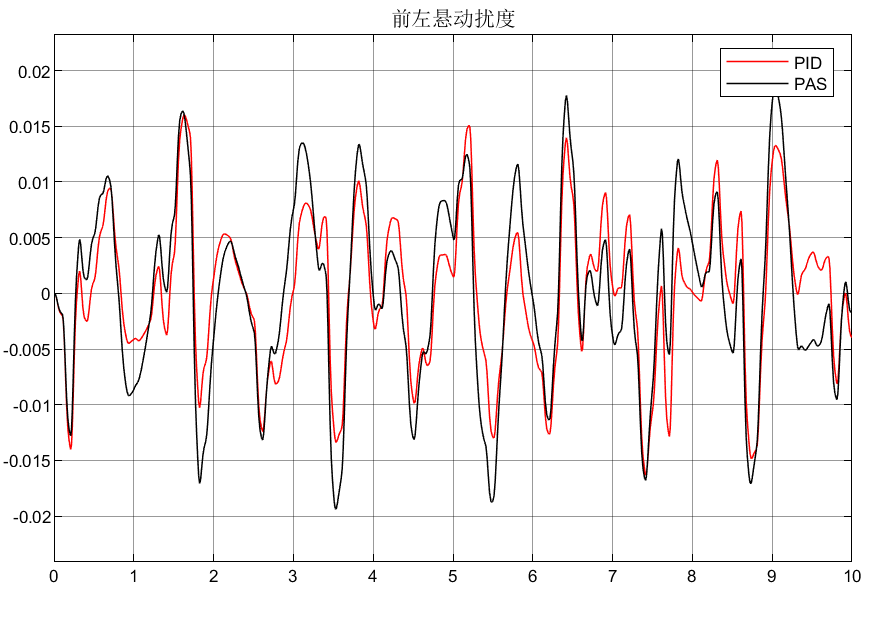
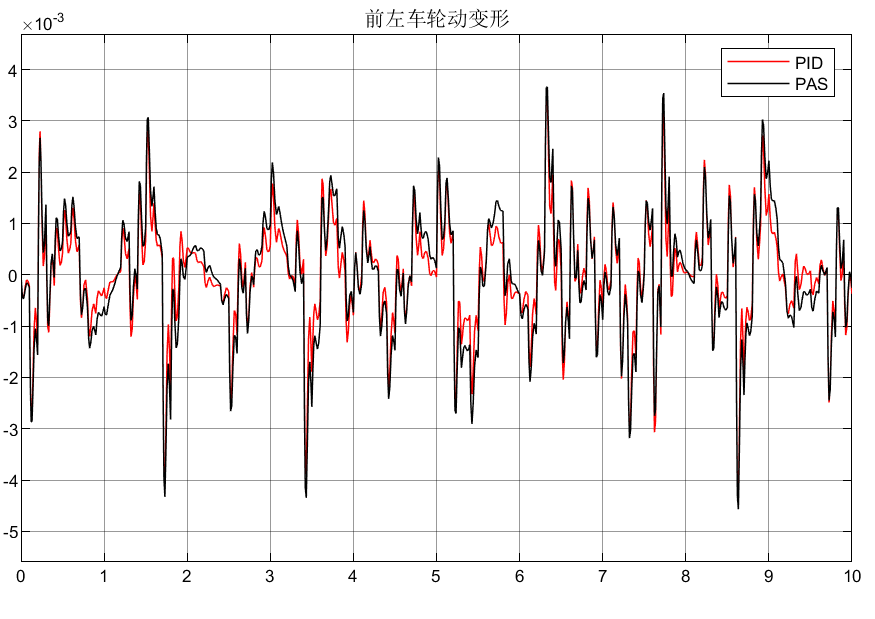
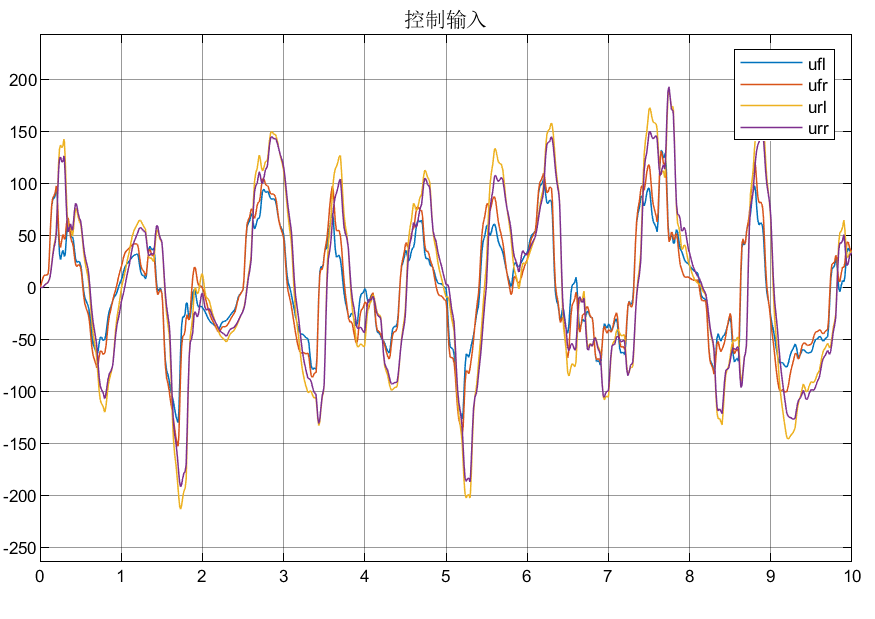
3.2仿真分析
参考文献
[1] 王孝鹏,吴晨雄,黄道进. 基于模糊PID控制器的1/2整车半主动悬架仿真研究[J]. 湖南工业大学学报,2017,31(6):54-59. DOI:10.3969/j.issn.1673-9833.2017.06.010.
[2] 王孝鹏,陈秀萍,马豪,等. 基于PID控制器的1/2整车半主动悬架仿真研究[J]. 太原科技大学学报,2017(5).
[3] 裴倩倩. 基于改进PID控制的汽车主动悬架系统研究[J]. 中国新技术新产品,2020(8):21-23. DOI:10.3969/j.issn.1673-9957.2020.08.011.
[4] 王登强,王锐,董正欣. 基于Sinmulik汽车主动悬架PID控制器设计与仿真[J]. 农机使用与维修,2019(4):15. DOI:10.14031/j.cnki.njwx.2019.04.008.
[5] 郭全民,张豪文,王言. 汽车半主动悬架整车协调控制策略[J]. 系统仿真学报,2020,32(4):700-708. DOI:10.16182/j.issn1004731x.joss.18-0506.
[6] 应艳杰. EPS与ASS整车系统的H<,∞>/PID集成控制研究[D]. 安徽:合肥工业大学,2005. DOI:10.7666/d.y720826.
[7] 钟汉文,卜继玲,姜其斌,等. 基于整车平顺性的主动悬架联合仿真研究[C]. //第八届中国CAE工程分析技术年会暨2012全国计算机辅助工程(CAE)技术与应用高级研讨会论文集. 2012.