参考B站古月居ROS入门21讲:tf坐标系广播与监听的编程实现
基于VMware Ubuntu 20.04 Noetic版本的环境
文章目录
- 一、创建功能包
- 二、创建代码
- 2.1 以C++为例
- 2.1.1 配置代码编译规则
- 2.1.2 编译整个工作空间
- 2.1.2 配置环境变量
- 2.1.4 执行代码
- 2.2 以Python为例
- 2.2.1 配置代码编译规则
- 2.2.2 编译整个工作空间
- 2.2.3 配置环境变量
- 2.2.4 执行代码
一、创建功能包
我们在src目录下创建learning_tf功能包:
cd ~/catkin_ws/src
catkin_create_pkg learning_tf roscpp rospy tf turtlesim
二、创建代码
如何实现一个TF广播器?
- 定义TF广播器(TransformBroadcaster)
- 创建坐标变换值
- 发布坐标变换(sendTransform)
如何实现一个TF监听器?
- 定义TF监听器(TransformListener)
- 查找坐标变换(waitForTransform、lookupTransform)
2.1 以C++为例
turtle_tf_broadcaster.cpp和turtle_tf_listener.cpp拷贝进src目录下,
turtle_tf_broadcaster.cpp代码为:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程产生tf数据,并计算、发布turtle2的速度指令
*/
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// 创建tf的广播器
static tf::TransformBroadcaster br;
// 初始化tf数据
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 广播world与海龟坐标系之间的tf数据
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_broadcaster");
// 输入参数作为海龟的名字
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
}
turtle_name = argv[1];
// 订阅海龟的位姿话题
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
};
turtle_tf_listener.cpp代码为:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程监听tf数据,并计算、发布turtle2的速度指令
*/
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_listener");
// 创建节点句柄
ros::NodeHandle node;
// 请求产生turtle2
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
// 创建发布turtle2速度控制指令的发布者
ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel", 10);
// 创建tf的监听器
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok())
{
// 获取turtle1与turtle2坐标系之间的tf数据
tf::StampedTransform transform;
try
{
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 根据turtle1与turtle2坐标系之间的位置关系,发布turtle2的速度控制指令
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
2.1.1 配置代码编译规则
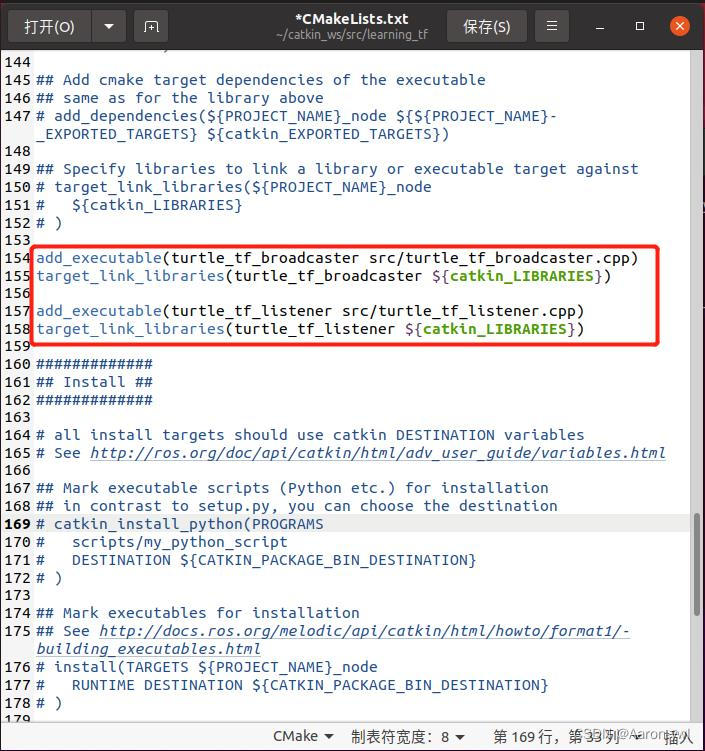
将以下代码拷贝CMakeLists.txt进指定位置:
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
2.1.2 编译整个工作空间
cd ~/catkin_ws
catkin_make
2.1.2 配置环境变量
之前已经配置过。
2.1.4 执行代码
roscore
rosrun turtlesim turtlesim_node
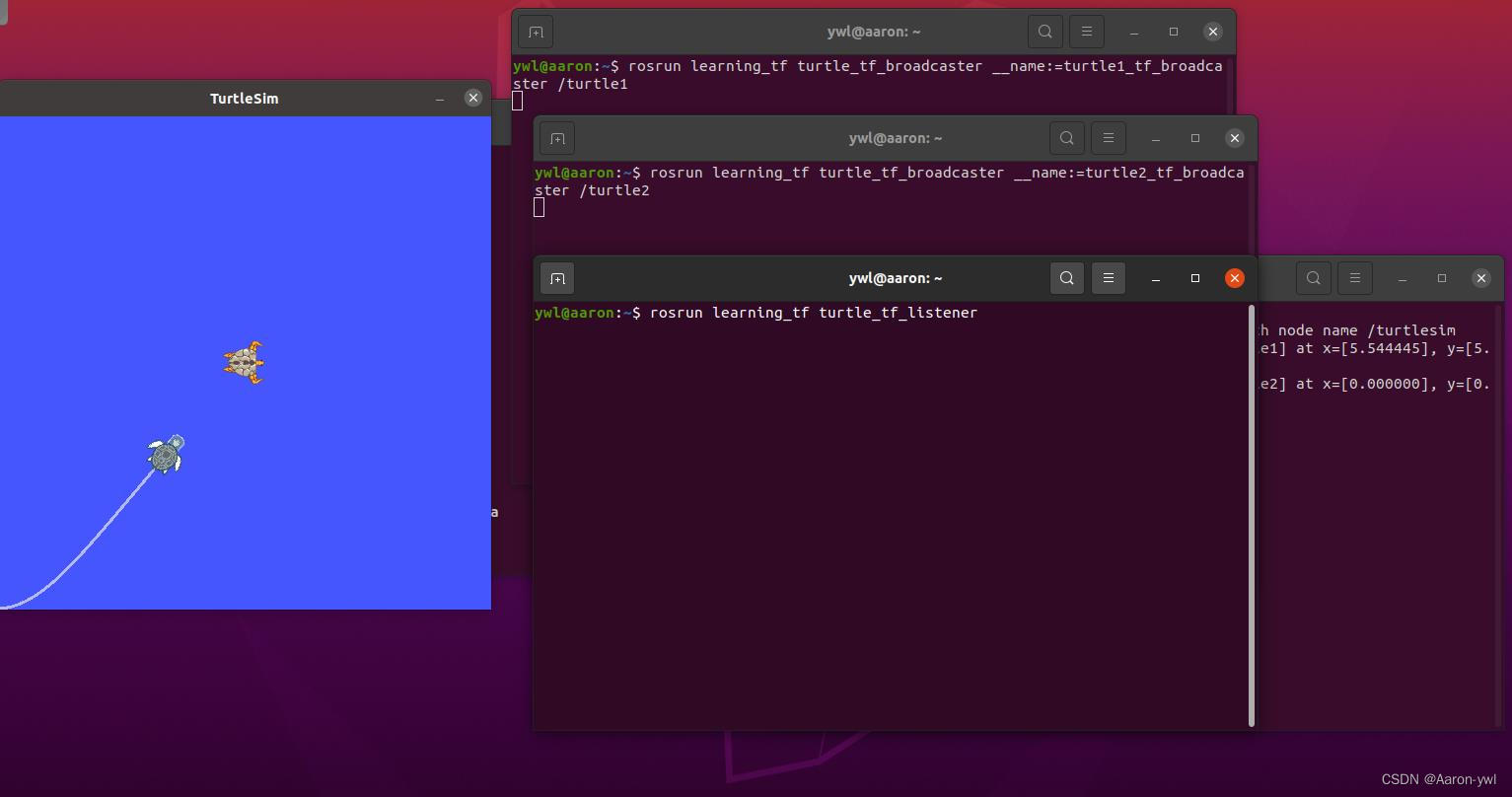
我们下面直接在命令行传入参数。
第1个参数:我们在turtle_tf_broadcaster.cpp定义节点时使用了"my_tf_broadcaster"的名字,我们使用__name:=传入新的名字取代"my_tf_broadcaster",这样避免名字重复(因为ROS中节点名字不能重复),这样就可以重复跑程序了。
第2个参数是turtle名称 turtle1 和 turtle2。
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
rosrun learning_tf turtle_tf_listener
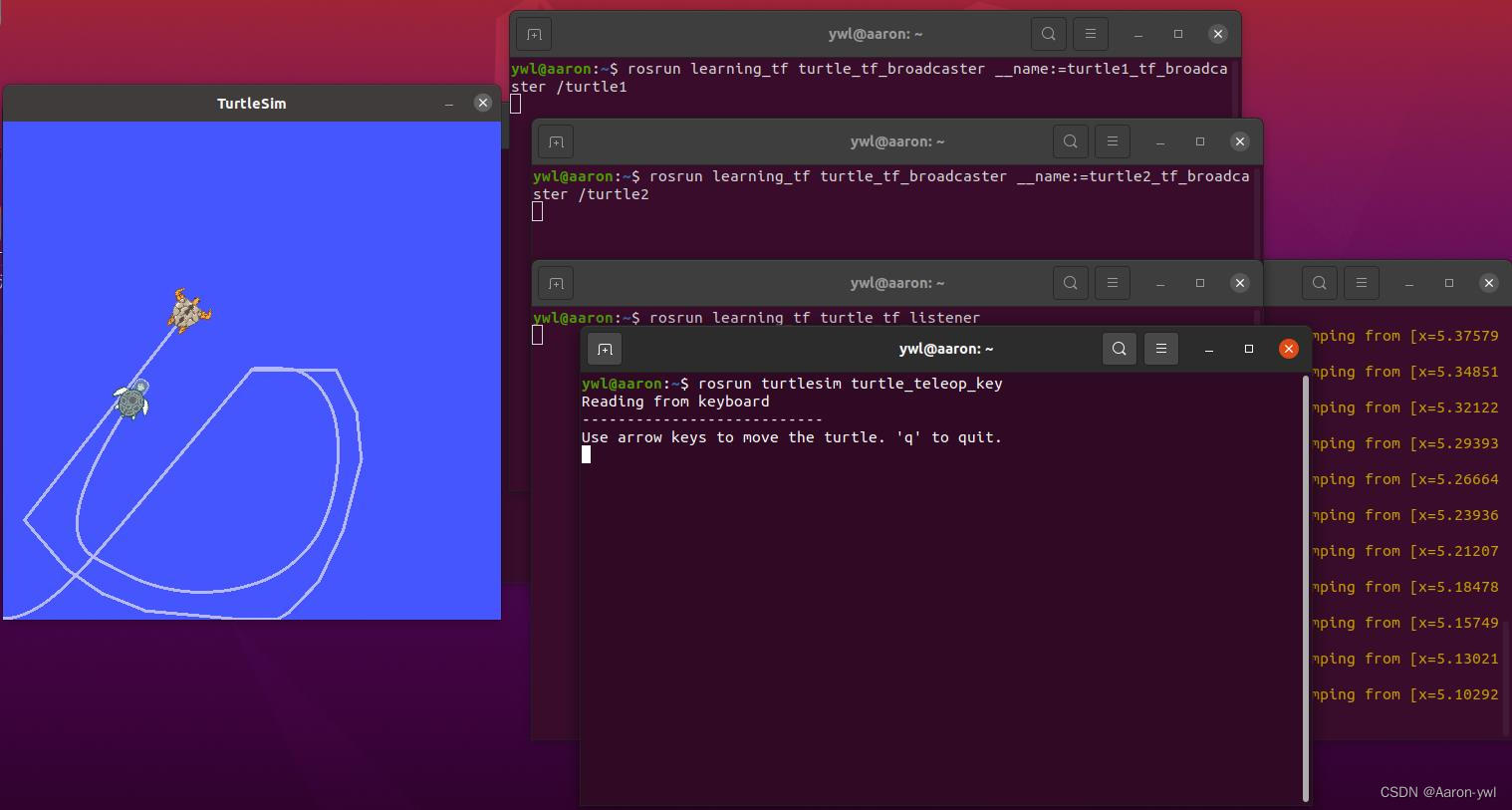
执行完后就会有一只小海龟生成并跑向中间的第1只小海龟。
我们可以用键盘控制小海龟,同样可以让第2只小海龟追着我们跑。
2.2 以Python为例
将turtle_tf_broadcaster.py和turtle_tf_listener.py拷贝进scripts文件夹下(打开执行权限)。
turtle_tf_broadcaster.py代码为:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将请求/show_person服务,服务数据类型learning_service::Person
import roslib
roslib.load_manifest('learning_tf')
import rospy
import tf
import turtlesim.msg
def handle_turtle_pose(msg, turtlename):
br = tf.TransformBroadcaster()
br.sendTransform((msg.x, msg.y, 0),
tf.transformations.quaternion_from_euler(0, 0, msg.theta),
rospy.Time.now(),
turtlename,
"world")
if __name__ == '__main__':
rospy.init_node('turtle_tf_broadcaster')
turtlename = rospy.get_param('~turtle')
rospy.Subscriber('/%s/pose' % turtlename,
turtlesim.msg.Pose,
handle_turtle_pose,
turtlename)
rospy.spin()
turtle_tf_listener.py代码为:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将请求/show_person服务,服务数据类型learning_service::Person
import roslib
roslib.load_manifest('learning_tf')
import rospy
import math
import tf
import geometry_msgs.msg
import turtlesim.srv
if __name__ == '__main__':
rospy.init_node('turtle_tf_listener')
listener = tf.TransformListener()
rospy.wait_for_service('spawn')
spawner = rospy.ServiceProxy('spawn', turtlesim.srv.Spawn)
spawner(4, 2, 0, 'turtle2')
turtle_vel = rospy.Publisher('turtle2/cmd_vel', geometry_msgs.msg.Twist,queue_size=1)
rate = rospy.Rate(10.0)
while not rospy.is_shutdown():
try:
(trans,rot) = listener.lookupTransform('/turtle2', '/turtle1', rospy.Time(0))
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
continue
angular = 4 * math.atan2(trans[1], trans[0])
linear = 0.5 * math.sqrt(trans[0] ** 2 + trans[1] ** 2)
cmd = geometry_msgs.msg.Twist()
cmd.linear.x = linear
cmd.angular.z = angular
turtle_vel.publish(cmd)
rate.sleep()
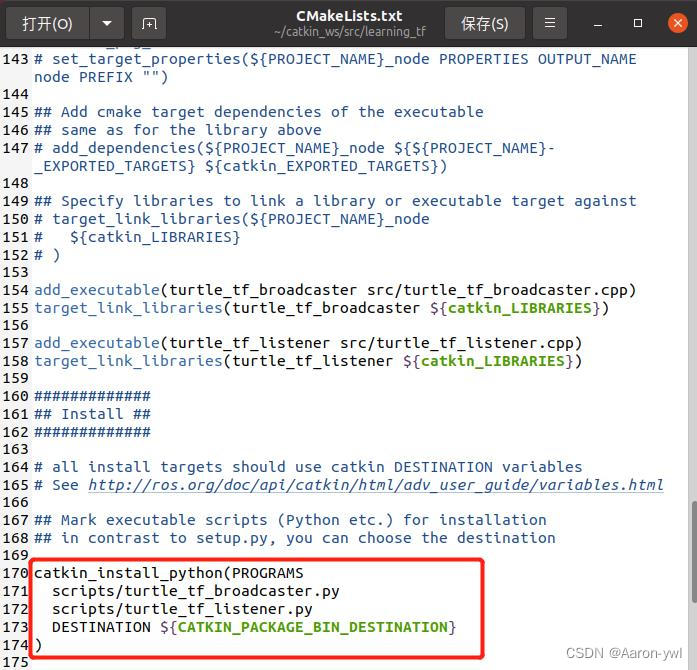
2.2.1 配置代码编译规则
打开CMakeLists.txt,配置编译规则
2.2.2 编译整个工作空间
cd ~/catkin_ws
catkin_make
2.2.3 配置环境变量
之前已经配置过。
2.2.4 执行代码
roscore
rosrun turtlesim turtlesim_node
rosrun learning_tf turtle_tf_broadcaster.py __name:=turtle1_tf_broadcaster _turtle:=turtle1
rosrun learning_tf turtle_tf_broadcaster.py __name:=turtle2_tf_broadcaster _turtle:=turtle2
rosrun learning_tf turtle_tf_listener.py
rosrun turtlesim turtle_teleop_key


![[ROC-RK3568-PC] [Firefly-Android] 10min带你了解I2C的使用](https://img-blog.csdnimg.cn/41b14b72c62b4ea38eda980129f819ac.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBATmV1dGlvbndlaQ==,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)