目录
串口文件
指令操作串口
程序操作串口
程序说明
程序代码
4_ChuanKou_2.c
启动交叉编译工具
编译
拷贝到开发板
测试
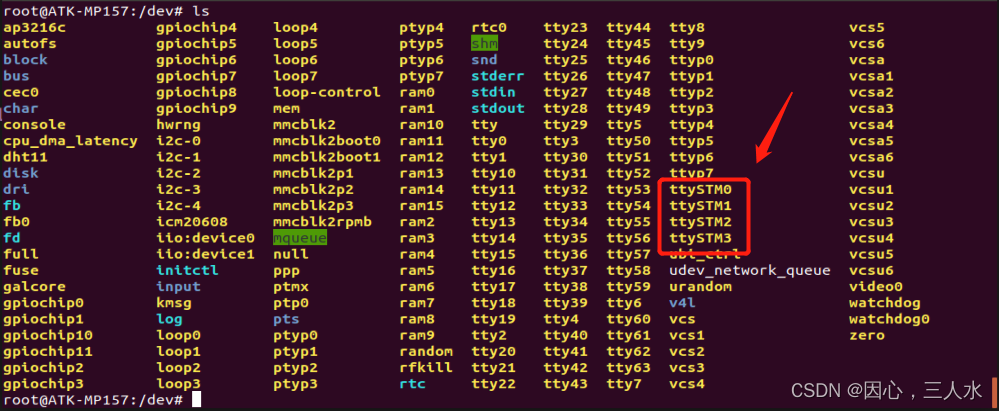
串口文件
在/dev目录下,存放了串口的文件。
| 文件名 | 对应的串口 |
|---|---|
| ttySTM0 | CH340 |
| ttySTM1 | com2(公头) |
| ttySTM2 | com1(母头) |
| ttySTM3 | 被开发板的蓝牙所使用(不可用) |
注意:文件名的命名只跟驱动有关。
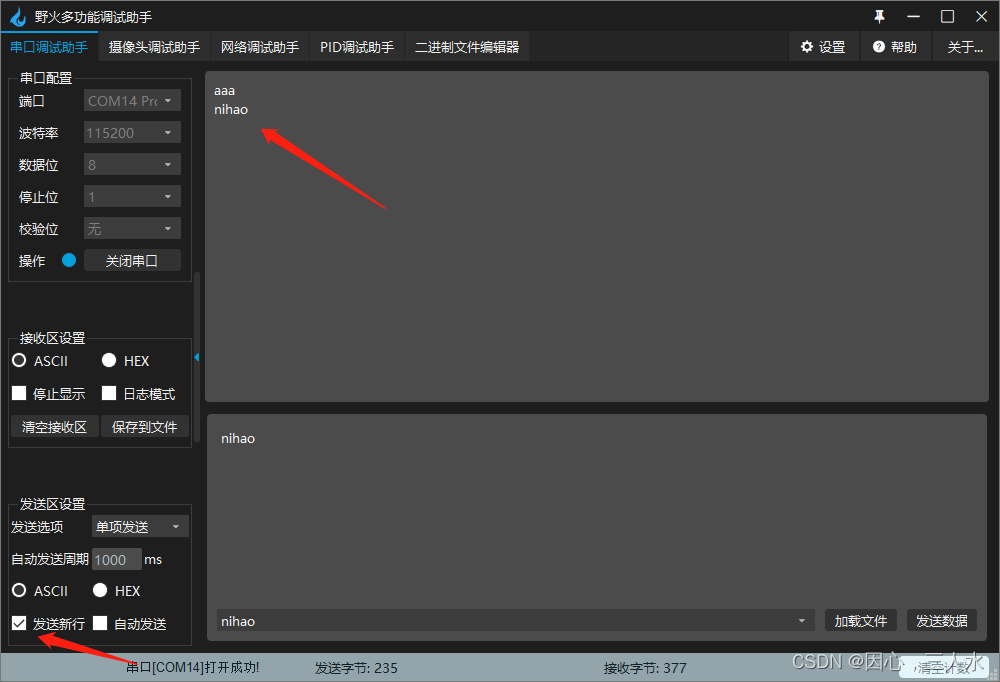
指令操作串口
设置com1串口波特率为115200。
stty -F ttySTM2 115200
向com1串口发送数据。
echo aaa > ttySTM2 
com1串口接收数据。
cat ttySTM2 
程序操作串口
程序说明
参数1:串口文件序号。
0:ttySTM0。
1:ttySTM1。
2:ttySTM2。
参数2:波特率。
程序代码
4_ChuanKou_2.c
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <termios.h>
#include <unistd.h>
#include <errno.h>
#include <string.h>
#include <ctype.h>
//./xxx 1 115200
int main(int argc, char *argv[])
{
//检查参数个数
if (argc != 3)
{
printf("%s文件的参数个数错误!\n", argv[0]);
return -1;
}
//检查参数1是否为纯数字
char *endptr;
strtol(argv[1], &endptr, 10);
if ((endptr == argv[1]) || ((!isspace(*endptr)) && (*endptr != '\0')))
{
perror("参数1错误!\n");
return -1;
}
endptr = NULL;
//检查参数2是否为纯数字
strtol(argv[2], &endptr, 10);
if ((endptr == argv[2]) || ((!isspace(*endptr)) && (*endptr != '\0')))
{
perror("参数2错误!\n");
return -1;
}
//检查参数1的取值范围:<3
if (atol(argv[1]) >= 3)
{
perror("参数1错误!\n");
return -1;
}
char tty_path[100];
sprintf(tty_path, "/dev/ttySTM%s", argv[1]);
int fd = open(tty_path, O_RDWR | O_NOCTTY);
if (fd < 0)
{
printf("打开%s失败!\n", tty_path);
return -1;
}
//获取串口文件属性,以便于修改相应的属性
struct termios options;
if (tcgetattr(fd, &options) < 0)
{
printf("获取串口属性错误!\n");
return -1;
}
//设置波特率
if (strcmp(argv[2], "50") == 0)
{
cfsetispeed(&options, B50); //设置串口输入波特率
cfsetospeed(&options, B50); //设置串口输出波特率
}
else if (strcmp(argv[2], "75") == 0)
{
cfsetispeed(&options, B75); //设置串口输入波特率
cfsetospeed(&options, B75); //设置串口输出波特率
}
else if (strcmp(argv[2], "110") == 0)
{
cfsetispeed(&options, B110); //设置串口输入波特率
cfsetospeed(&options, B110); //设置串口输出波特率
}
else if (strcmp(argv[2], "134") == 0)
{
cfsetispeed(&options, B134); //设置串口输入波特率
cfsetospeed(&options, B134); //设置串口输出波特率
}
else if (strcmp(argv[2], "150") == 0)
{
cfsetispeed(&options, B150); //设置串口输入波特率
cfsetospeed(&options, B150); //设置串口输出波特率
}
else if (strcmp(argv[2], "200") == 0)
{
cfsetispeed(&options, B200); //设置串口输入波特率
cfsetospeed(&options, B200); //设置串口输出波特率
}
else if (strcmp(argv[2], "300") == 0)
{
cfsetispeed(&options, B300); //设置串口输入波特率
cfsetospeed(&options, B300); //设置串口输出波特率
}
else if (strcmp(argv[2], "600") == 0)
{
cfsetispeed(&options, B600); //设置串口输入波特率
cfsetospeed(&options, B600); //设置串口输出波特率
}
else if (strcmp(argv[2], "1200") == 0)
{
cfsetispeed(&options, B1200); //设置串口输入波特率
cfsetospeed(&options, B1200); //设置串口输出波特率
}
else if (strcmp(argv[2], "1800") == 0)
{
cfsetispeed(&options, B1800); //设置串口输入波特率
cfsetospeed(&options, B1800); //设置串口输出波特率
}
else if (strcmp(argv[2], "2400") == 0)
{
cfsetispeed(&options, B2400); //设置串口输入波特率
cfsetospeed(&options, B2400); //设置串口输出波特率
}
else if (strcmp(argv[2], "2400") == 0)
{
cfsetispeed(&options, B2400); //设置串口输入波特率
cfsetospeed(&options, B2400); //设置串口输出波特率
}
else if (strcmp(argv[2], "4800") == 0)
{
cfsetispeed(&options, B4800); //设置串口输入波特率
cfsetospeed(&options, B4800); //设置串口输出波特率
}
else if (strcmp(argv[2], "9600") == 0)
{
cfsetispeed(&options, B9600); //设置串口输入波特率
cfsetospeed(&options, B9600); //设置串口输出波特率
}
else if (strcmp(argv[2], "19200") == 0)
{
cfsetispeed(&options, B19200); //设置串口输入波特率
cfsetospeed(&options, B19200); //设置串口输出波特率
}
else if (strcmp(argv[2], "38400") == 0)
{
cfsetispeed(&options, B38400); //设置串口输入波特率
cfsetospeed(&options, B38400); //设置串口输出波特率
}
else if (strcmp(argv[2], "57600") == 0)
{
cfsetispeed(&options, B57600); //设置串口输入波特率
cfsetospeed(&options, B57600); //设置串口输出波特率
}
else if (strcmp(argv[2], "115200") == 0)
{
cfsetispeed(&options, B115200); //设置串口输入波特率
cfsetospeed(&options, B115200); //设置串口输出波特率
}
else if (strcmp(argv[2], "230400") == 0)
{
cfsetispeed(&options, B230400); //设置串口输入波特率
cfsetospeed(&options, B230400); //设置串口输出波特率
}
else if (strcmp(argv[2], "460800") == 0)
{
cfsetispeed(&options, B460800); //设置串口输入波特率
cfsetospeed(&options, B460800); //设置串口输出波特率
}
else if (strcmp(argv[2], "500000") == 0)
{
cfsetispeed(&options, B500000); //设置串口输入波特率
cfsetospeed(&options, B500000); //设置串口输出波特率
}
else if (strcmp(argv[2], "576000") == 0)
{
cfsetispeed(&options, B576000); //设置串口输入波特率
cfsetospeed(&options, B576000); //设置串口输出波特率
}
else if (strcmp(argv[2], "921600") == 0)
{
cfsetispeed(&options, B921600); //设置串口输入波特率
cfsetospeed(&options, B921600); //设置串口输出波特率
}
else if (strcmp(argv[2], "1000000") == 0)
{
cfsetispeed(&options, B1000000); //设置串口输入波特率
cfsetospeed(&options, B1000000); //设置串口输出波特率
}
else if (strcmp(argv[2], "1152000") == 0)
{
cfsetispeed(&options, B1152000); //设置串口输入波特率
cfsetospeed(&options, B1152000); //设置串口输出波特率
}
else if (strcmp(argv[2], "1500000") == 0)
{
cfsetispeed(&options, B1500000); //设置串口输入波特率
cfsetospeed(&options, B1500000); //设置串口输出波特率
}
else if (strcmp(argv[2], "2000000") == 0)
{
cfsetispeed(&options, B2000000); //设置串口输入波特率
cfsetospeed(&options, B2000000); //设置串口输出波特率
}
else if (strcmp(argv[2], "2500000") == 0)
{
cfsetispeed(&options, B2500000); //设置串口输入波特率
cfsetospeed(&options, B2500000); //设置串口输出波特率
}
else if (strcmp(argv[2], "3000000") == 0)
{
cfsetispeed(&options, B3000000); //设置串口输入波特率
cfsetospeed(&options, B3000000); //设置串口输出波特率
}
else if (strcmp(argv[2], "3500000") == 0)
{
cfsetispeed(&options, B3500000); //设置串口输入波特率
cfsetospeed(&options, B3500000); //设置串口输出波特率
}
else if (strcmp(argv[2], "4000000") == 0)
{
cfsetispeed(&options, B4000000); //设置串口输入波特率
cfsetospeed(&options, B4000000); //设置串口输出波特率
}
else
{
printf("波特率参数错误!\n");
return -1;
}
//设置串口属性
if (tcsetattr(fd, TCSANOW, &options) < 0)
{
printf("设置串口属性错误!\n");
return -1;
}
printf("设置串口完成!\n");
printf("串口启动!\n");
//创建进程,读写串口功能分开
pid_t jin_cheng = fork();
if (jin_cheng < 0)
{
printf("创建进程错误!\n");
return -1;
}
else if (jin_cheng == 0) //子进程
{
char data[1024];
int num = 0;
while (1)
{
while ((num = read(fd, &data, 1024)) != 0)
{
printf("读取到的数据为:%s\n", data);
memset(data, '\0', strlen(data));
num = 0;
read(fd, &data, 1024); //读掉最后的停止位
}
}
}
else if (jin_cheng > 0) //父进程
{
char data[1024];
while (1)
{
scanf("%s", data);
getchar();
write(fd, data, strlen(data));
memset(data, '\0', strlen(data));
}
}
close(fd);
return 0;
}启动交叉编译工具
source /opt/st/stm32mp1/3.1-snapshot/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi
编译
${CC} -o 4_ChuanKou_2 4_ChuanKou_2.c 
拷贝到开发板
scp 4_ChuanKou_2 root@10.3.22.219:/home/root/Linux_C_YingYong_BianCheng/JiaoCheng/4_ChuanKou/

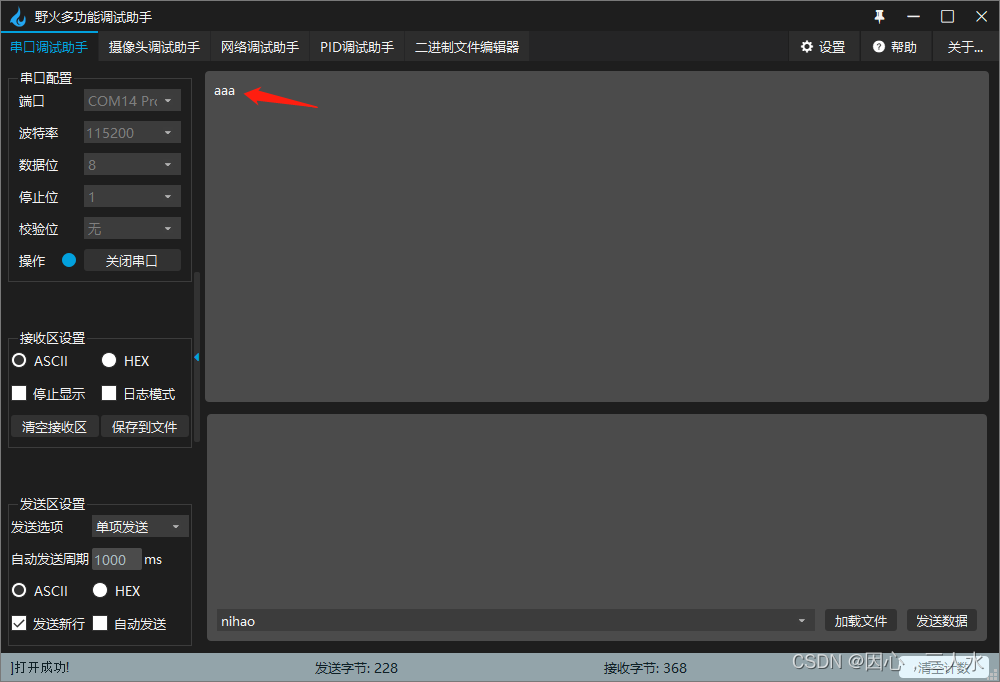
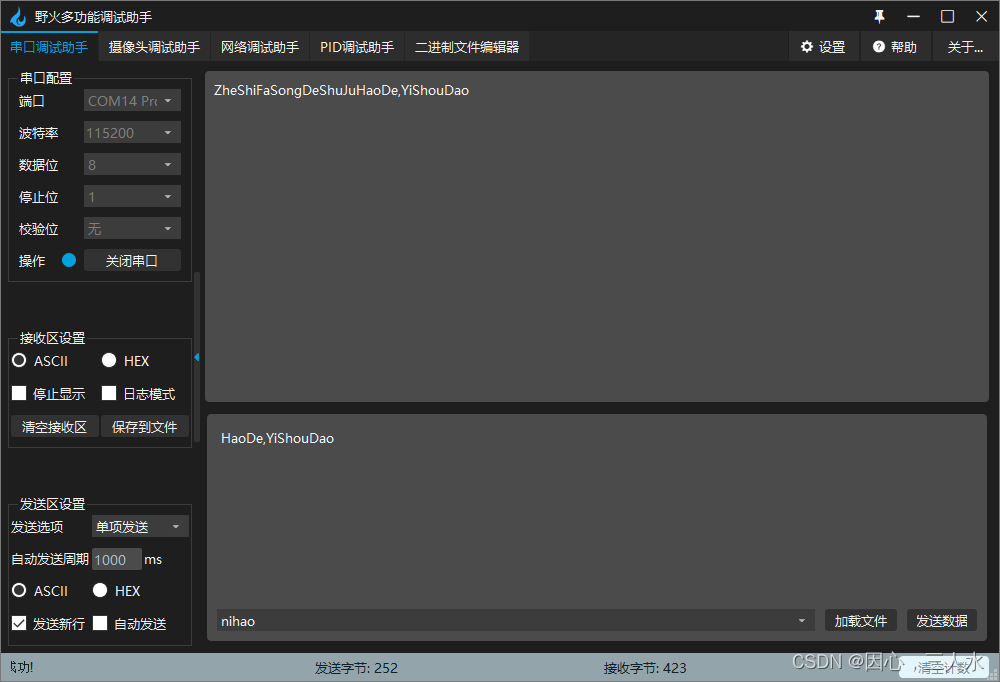
测试
使用com1串口进行数据收发,设置波特率为115200。
./4_ChuanKou_2 2 115200
发送数据。

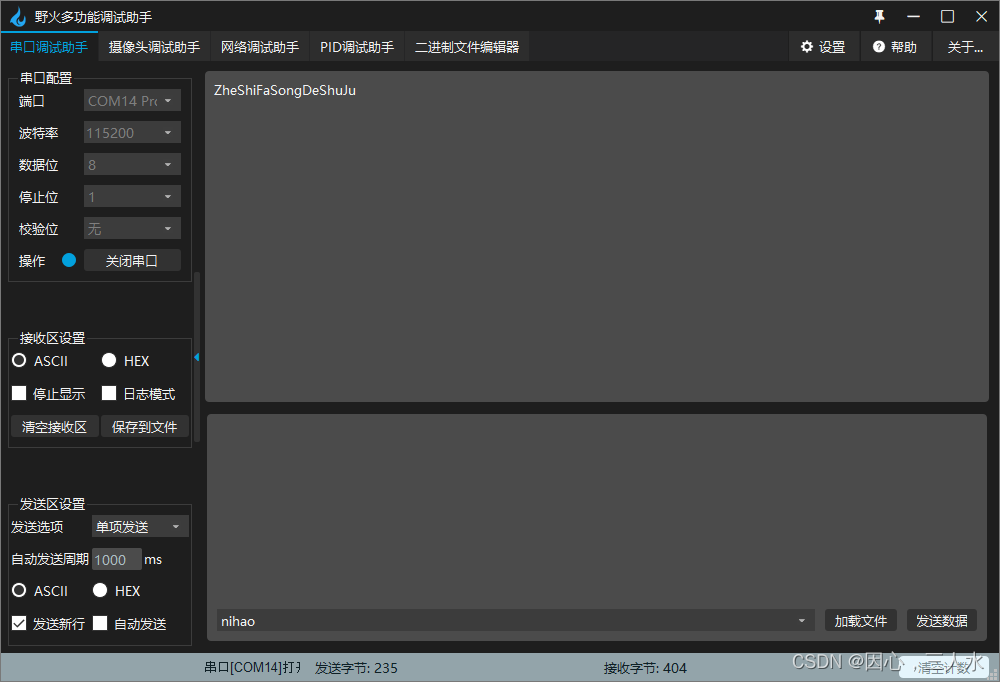
接收数据。







![[曾经沧海难为水]两数求和](https://img-blog.csdnimg.cn/img_convert/694de670f35d2adebf111c7f32fae7c1.png)