环境
- Solidwoks2021 SP5;
- Ubuntu22.04;
- ROS2 Humble;
步骤
基本步骤参考:Solidworks导出URDF总结(Noetic)
本文只介绍不同之处。
将solidworks生成的文件夹(我这里为wuwei2)移动到/ws_moveit2/src.
修改CMakeLists.txt 确认project(wuwei2)为自己的名称。
cmake_minimum_required(VERSION 3.5)
project(wuwei2)
find_package(ament_cmake REQUIRED)
install(
DIRECTORY images launch meshes rviz urdf
DESTINATION share/${PROJECT_NAME}
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
修改package.xml:确认name为自己的名称。
<package format="2">
<name>wuwei2</name>
<version>1.0.0</version>
<description>
<p>URDF Description package for wuwei2</p>
<p>This package contains configuration data, 3D models and launch files
for wuwei2 robot</p>
</description>
<author>TODO</author>
<maintainer email="TODO@email.com" />
<license>BSD</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<exec_depend>joint_state_publisher</exec_depend>
<exec_depend>joint_state_publisher_gui</exec_depend>
<exec_depend>robot_state_publisher</exec_depend>
<exec_depend>rviz2</exec_depend>
<exec_depend>xacro</exec_depend>
<test_depend>ament_lint_auto</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
修改/launch/display.launch:确认get_package_share_path(‘wuwei2’),urdf_tutorial_path / 'urdf/wuwei2.urdf’为自己的名称。
from ament_index_python.packages import get_package_share_path
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.conditions import IfCondition, UnlessCondition
from launch.substitutions import Command, LaunchConfiguration
from launch_ros.actions import Node
from launch_ros.parameter_descriptions import ParameterValue
def generate_launch_description():
urdf_tutorial_path = get_package_share_path('wuwei2')
default_model_path = urdf_tutorial_path / 'urdf/wuwei2.urdf'
default_rviz_config_path = urdf_tutorial_path / 'rviz/urdf.rviz'
gui_arg = DeclareLaunchArgument(name='gui', default_value='true', choices=['true', 'false'],
description='Flag to enable joint_state_publisher_gui')
model_arg = DeclareLaunchArgument(name='model', default_value=str(default_model_path),
description='Absolute path to robot urdf file')
rviz_arg = DeclareLaunchArgument(name='rvizconfig', default_value=str(default_rviz_config_path),
description='Absolute path to rviz config file')
robot_description = ParameterValue(Command(['xacro ', LaunchConfiguration('model')]),
value_type=str)
robot_state_publisher_node = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': robot_description}]
)
# Depending on gui parameter, either launch joint_state_publisher or joint_state_publisher_gui
joint_state_publisher_node = Node(
package='joint_state_publisher',
executable='joint_state_publisher',
condition=UnlessCondition(LaunchConfiguration('gui'))
)
joint_state_publisher_gui_node = Node(
package='joint_state_publisher_gui',
executable='joint_state_publisher_gui',
condition=IfCondition(LaunchConfiguration('gui'))
)
rviz_node = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
arguments=['-d', LaunchConfiguration('rvizconfig')],
)
return LaunchDescription([
gui_arg,
model_arg,
rviz_arg,
joint_state_publisher_node,
joint_state_publisher_gui_node,
robot_state_publisher_node,
rviz_node
])
新建images文件夹。
新建rviz文件夹,并新建urdf.rviz:
Panels:
- Class: rviz_common/Displays
Name: Displays
- Class: rviz_common/Views
Name: Views
Visualization Manager:
Class: ""
Displays:
- Class: rviz_default_plugins/Grid
Name: Grid
Value: true
- Alpha: 0.8
Class: rviz_default_plugins/RobotModel
Description Source: Topic
Description Topic:
Value: /robot_description
Enabled: true
Name: RobotModel
Value: true
- Class: rviz_default_plugins/TF
Name: TF
Value: true
Global Options:
Fixed Frame: base_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz_default_plugins/MoveCamera
Value: true
Views:
Current:
Class: rviz_default_plugins/Orbit
Distance: 1.7
Name: Current View
Pitch: 0.33
Value: Orbit (rviz)
Yaw: 5.5
Window Geometry:
Height: 800
Width: 1200
编译:
colcon build --packages-select wuwei2
. install/local_setup.bash
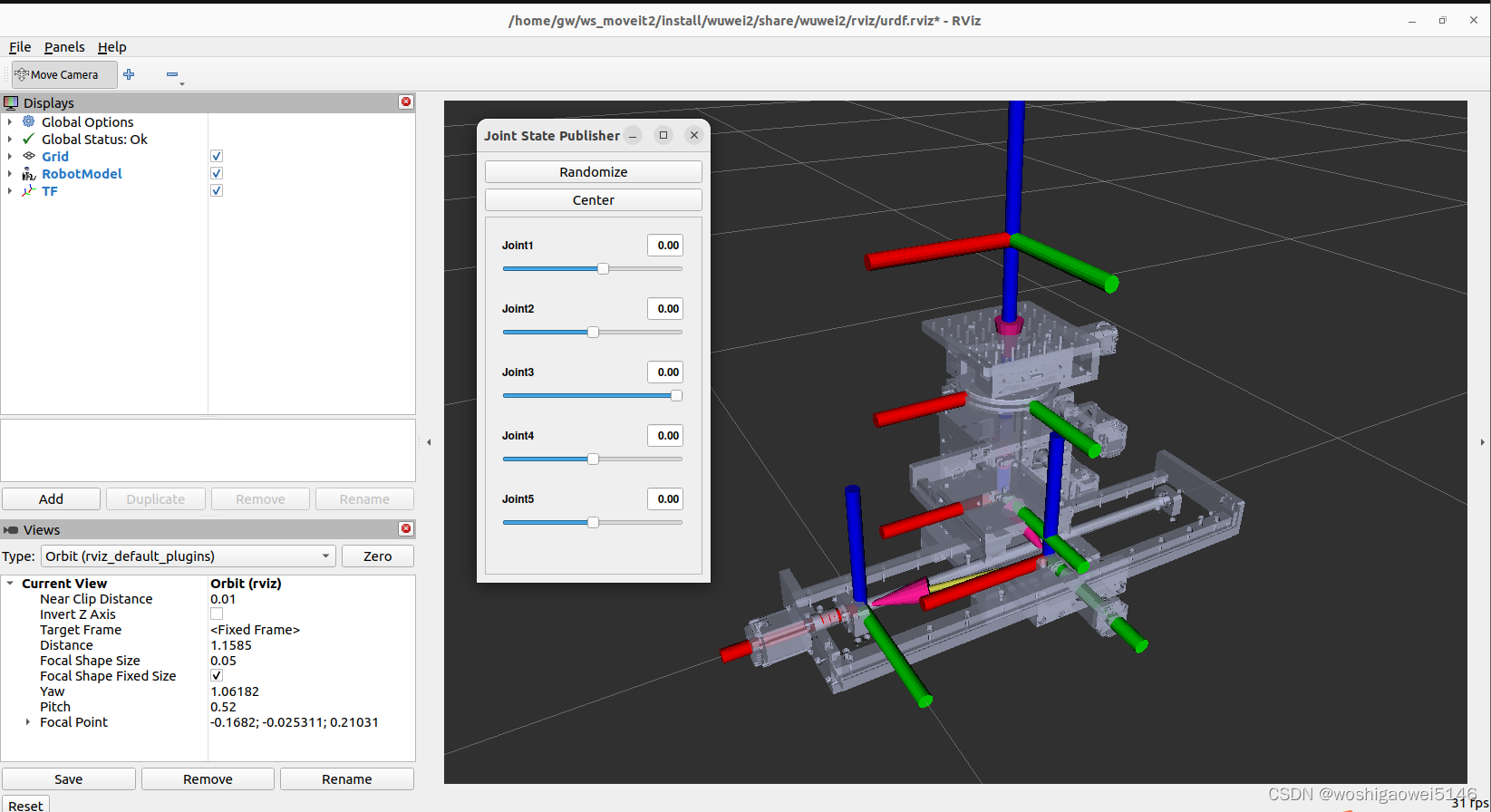
ros2 launch wuwei2 display.launch
效果:Robot Model滚动条可以显示转动移动效果。
参考
https://github.com/ros/urdf_tutorial/tree/ros2
https://github.com/xiaoming-sun6/sw2urdf_ros2(尝试过,但是不显示模型)
https://zhuanlan.zhihu.com/p/465398486
https://blog.csdn.net/cxyhjl/article/details/120922447