一.基本思想
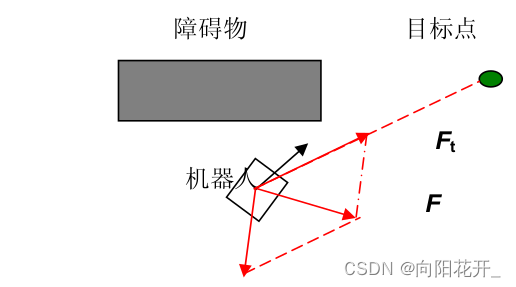
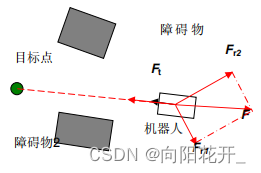
目标点对机器人产生吸引力,障碍物对机器人产生排斥力;
所有力的合成构成机器人的控制律
二. 主要步骤
1.构建人工势场
目标点:吸引势场
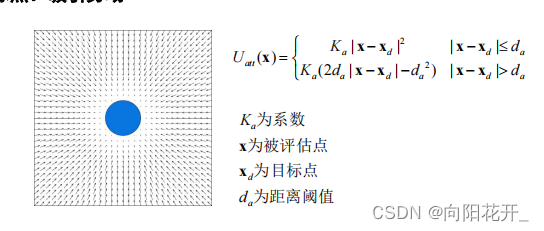
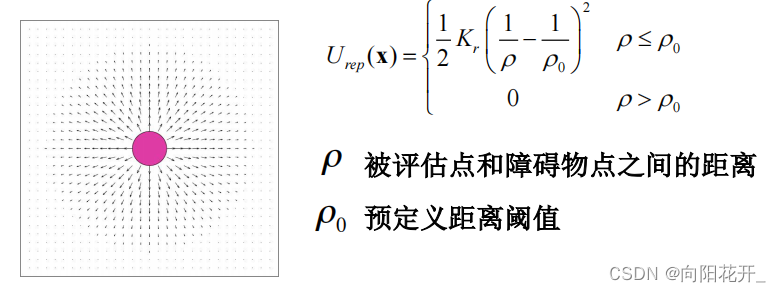
障碍物:排斥势场
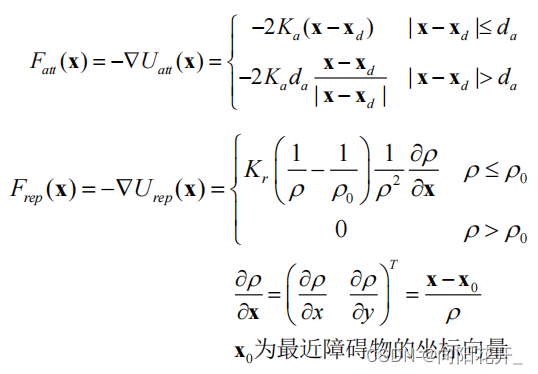
2.根据人工势场计算力
对势场求偏导
3.计算合力
计算合力,并进而由力计算得到控制律
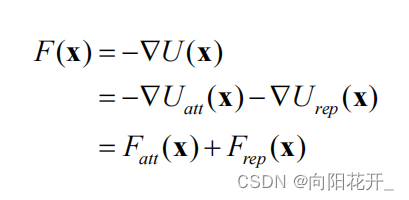
力的方向就是机器人运动的方向,力的大小就是对应机器人加速度控制
三 小结
1.优点
人工势场法不仅可以作为一种路径规划方法,所构建的势场也构成了机器人的控制律,能够较好的适应目标的变化和环境中的动态障碍物,因此,也可以作为实时避障算法。
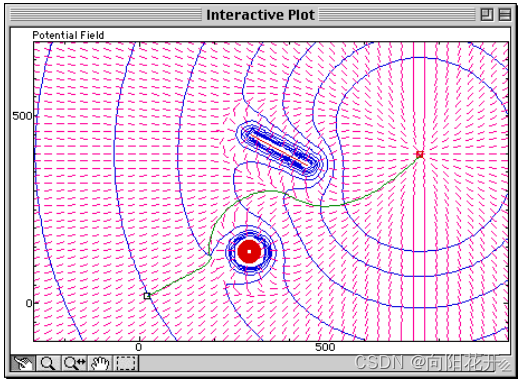
机器人是受人工势场影响的一个点,沿着势场方向就可以避开障碍物到达目标点。
2.缺点
- 由于其规划的路径是依据有限的局部环境信息,缺乏全局环境上宏观自我调节能力,极易陷入局部最优;
- 由于力的不平衡是机器人移动的主要因素,其极易在非目标点处达到力平衡,从而产生目标不可达现象;
- 在障碍物之间的狭窄空间里,极易陷入徘徊抖动等不稳定状态, 产生震荡和死锁
例如: 在上图中,在距离障碍物较远时,机器人收到目标点的吸引力较大,受到障碍物的排斥力较小,因此,更快的朝着目标点的方向运动。当距离障碍物较近时,受到的排斥力大于引力,导致机器人反向运动,之后又引力大于排斥力,导致机器人在该位置附近震荡。
针对该情况需要考虑并加以处理,例如 道路中间设置虚拟障碍物,使得机器人排斥力增大,规划从侧面绕行的路线。




![[YOLO] yolov3、yolov4、yolov5改进](https://img-blog.csdnimg.cn/4fc6b9403e9f495f94d896cc4bf3beba.png)