文章目录
- 一、基础知识点
- 二、开发环境
- 三、STM32CubeMX相关配置
- 1、STM32CubeMX基本配置
- 2、STM32CubeMX RS485 相关配置
- 四、Vscode代码讲解
- 五、结果演示以及报文解析
一、基础知识点
了解 RS485 Modbus协议技术 。本实验是基于STM32F103开发 实现 通过RS-485实现modbus协议。
准备好了吗?开始我的show time。
二、开发环境
1、硬件开发准备
主控:STM32F103ZET6
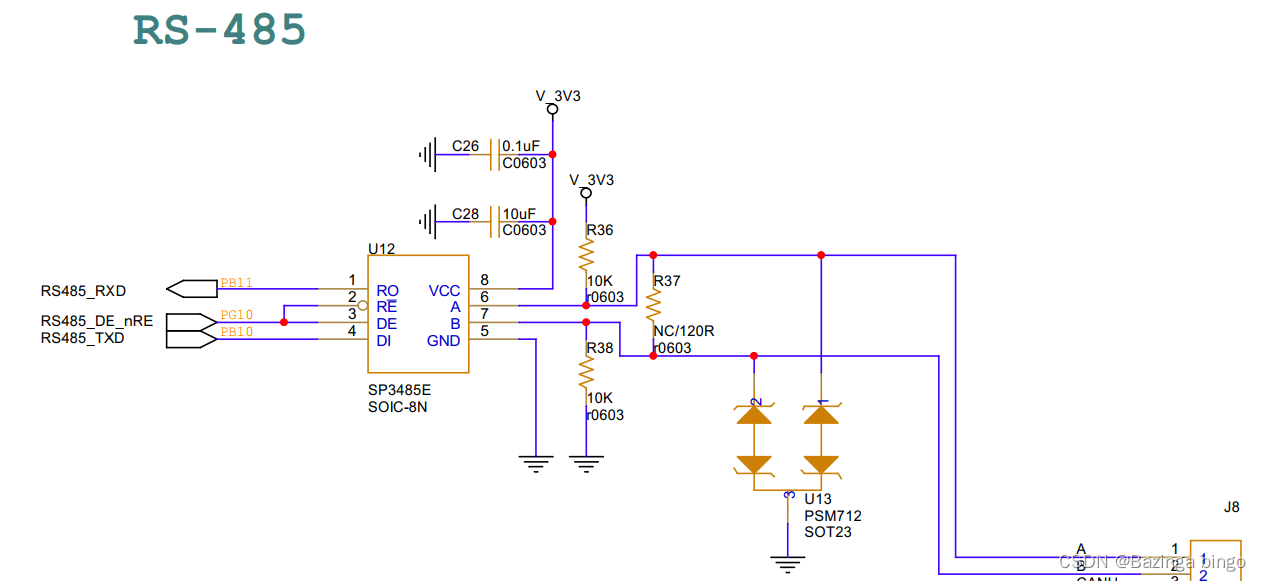
RS485收发器:SP3485P
2、软件开发准备
软件开发使用虚拟机 + VScode + STM32Cube 开发STM32,在虚拟机中直接完成编译下载。
该部分可参考:软件开发环境构建
三、STM32CubeMX相关配置
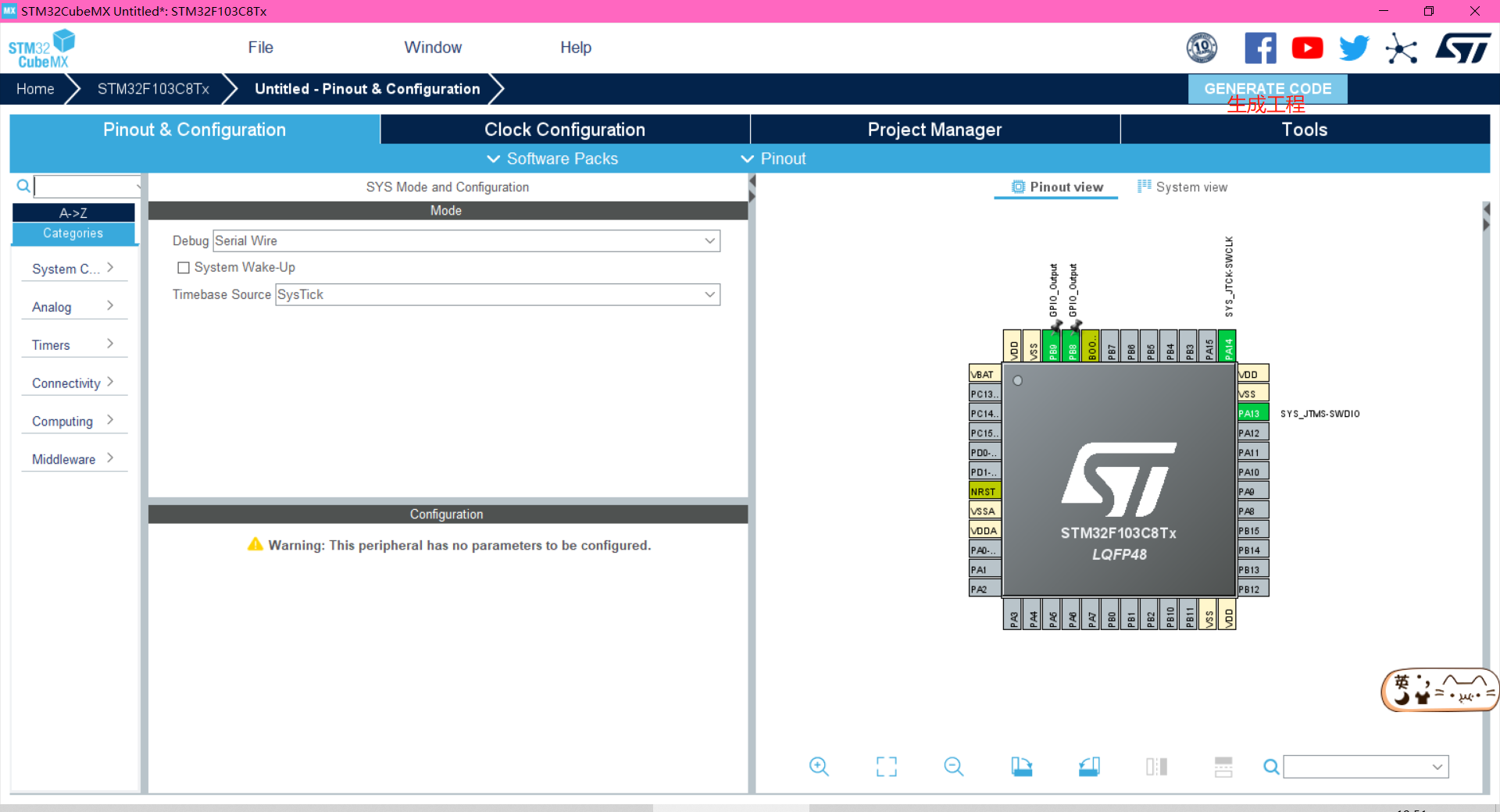
1、STM32CubeMX基本配置
本实验基于CubeMX详解构建基本框架 进行开发。
2、STM32CubeMX RS485 相关配置
(1)发送接收控制脚配置(GPIO配置)
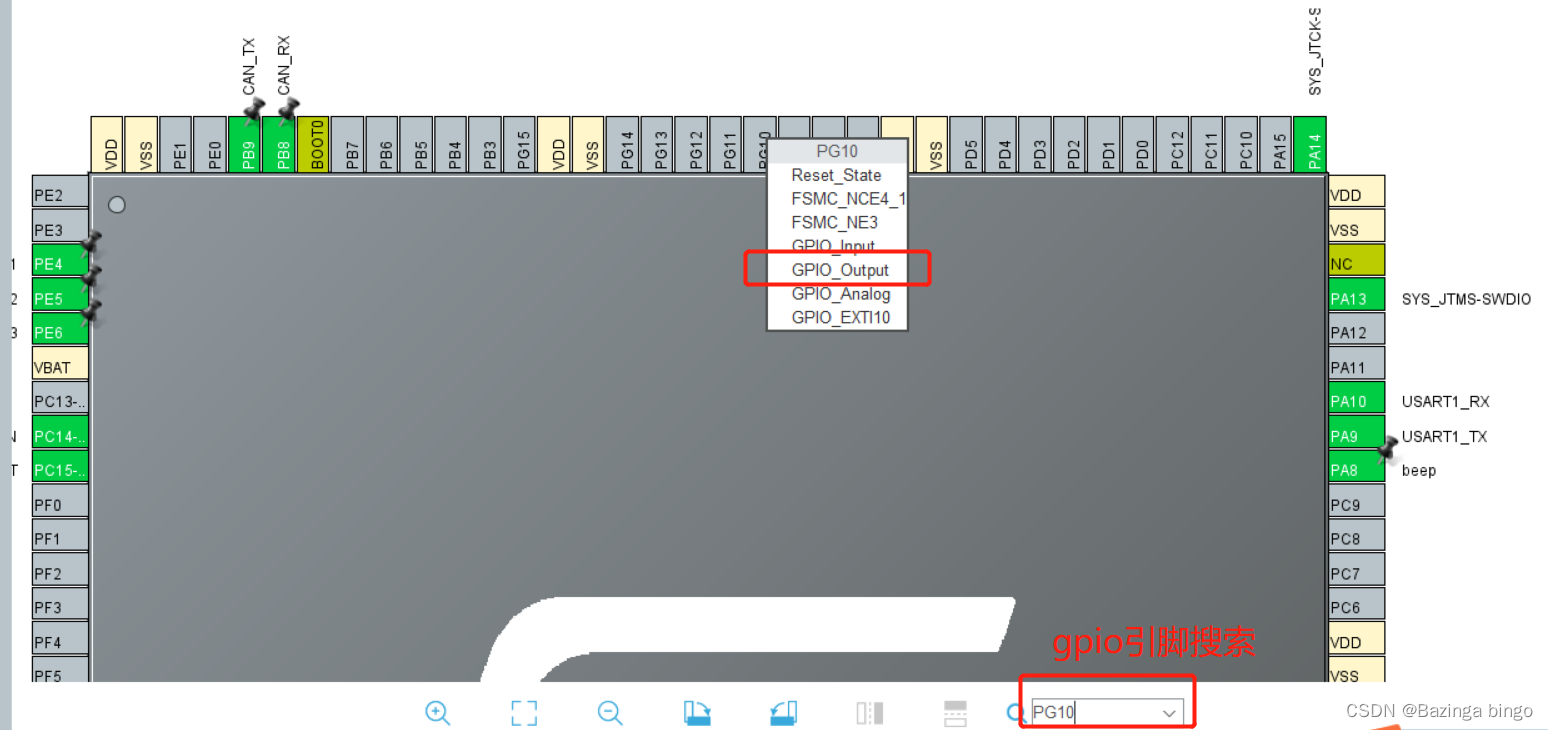
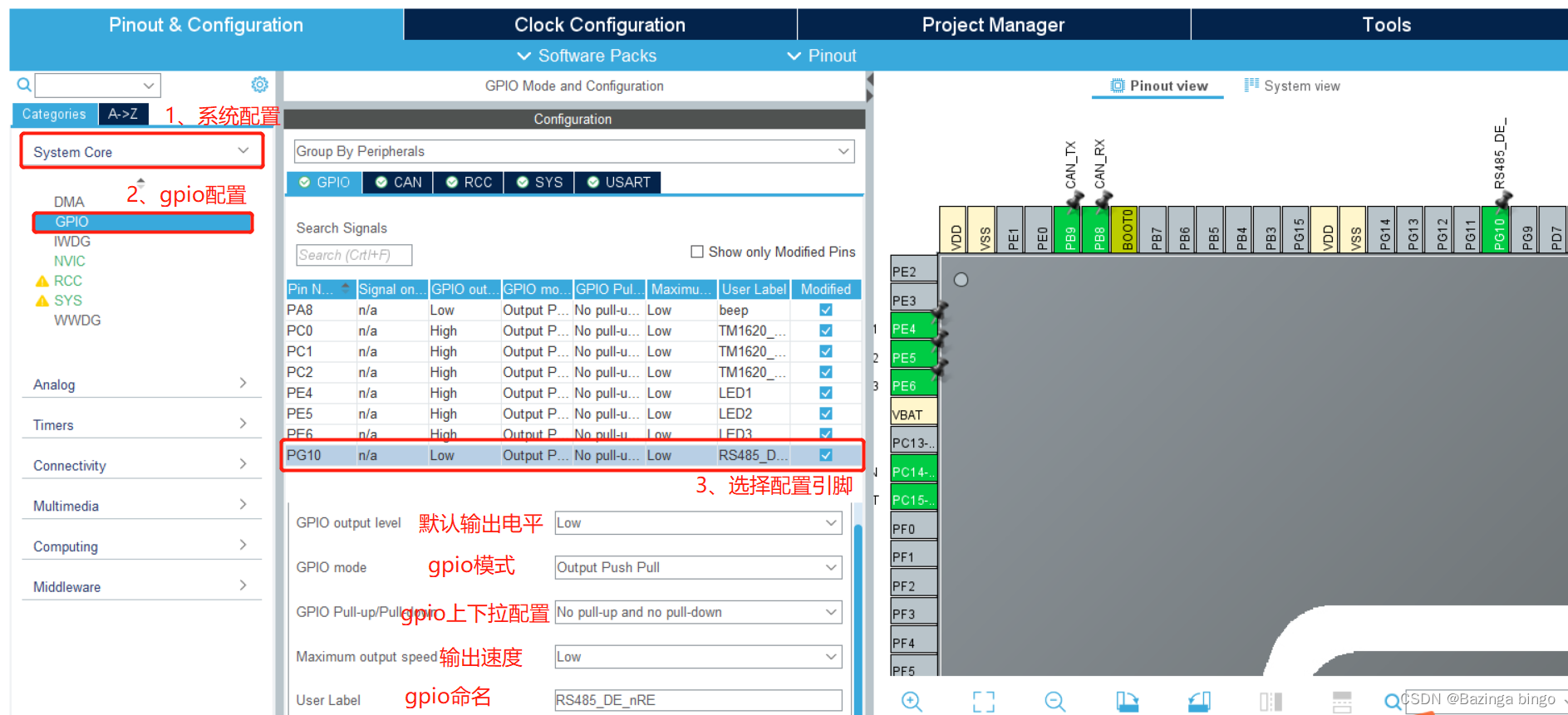
gpio输出电平: 低(控制引脚默认低电平,芯片处于读状态)
gpio模式: 推挽输出
gpio上下拉设置: 不上下拉
gpio输出速度: 低速
gpio命名: RS485_DE_nRE (与硬件标识一致,便于代码编写)
(2)串口UART3配置
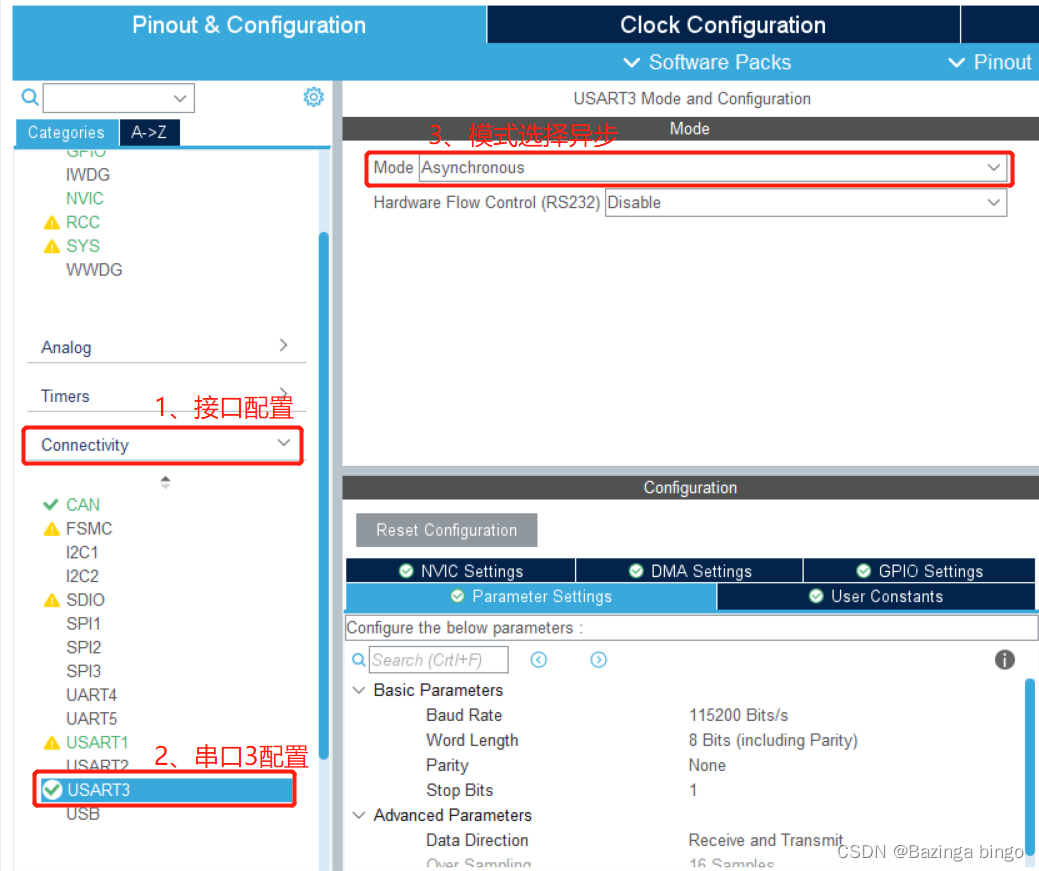
根据硬件引脚连接,RS485芯片连接UART3通信
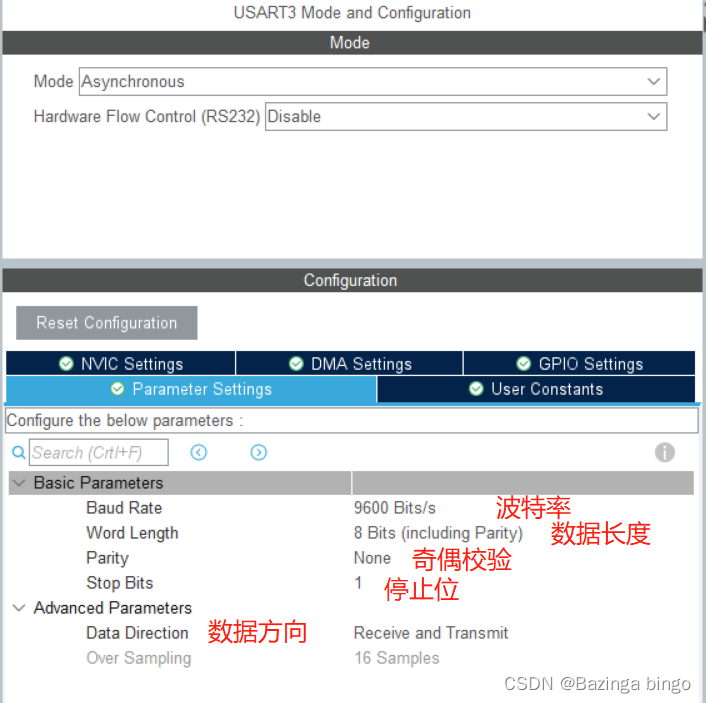
基本配置: 实验波特率采用9600、数据位8bit、无奇偶校验、停止位1bit
数据方向: 接收发送
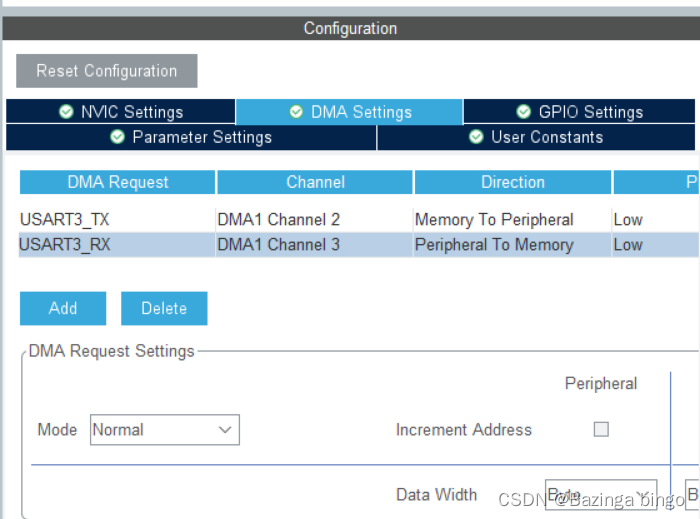
DMA配置: Add添加发送和接收的DMA,DMA参数保持默认状态
(3)中断配置
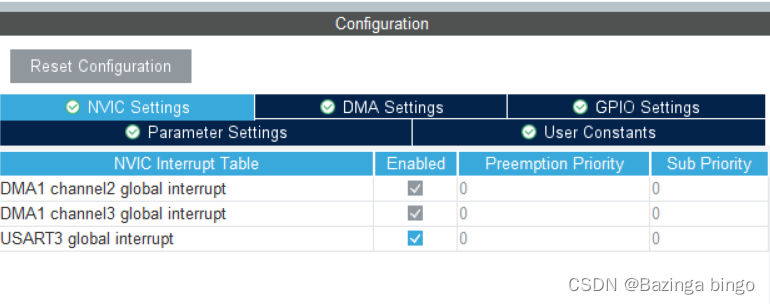
实验中接收数据采用空闲触发;发送数据采用DMA发送触发后发送完成中断
UART3总中断(USART3 global interrupt)必须打开(为了发送完成中断实现)
UART_RX (DMA1 channel3 global interrupt) DMA接收中断不打开,取消对钩(这里对钩无法改变,后续解决)
UART_TX (DMA1 channel2 global interrupt) DMA发送中断打开。
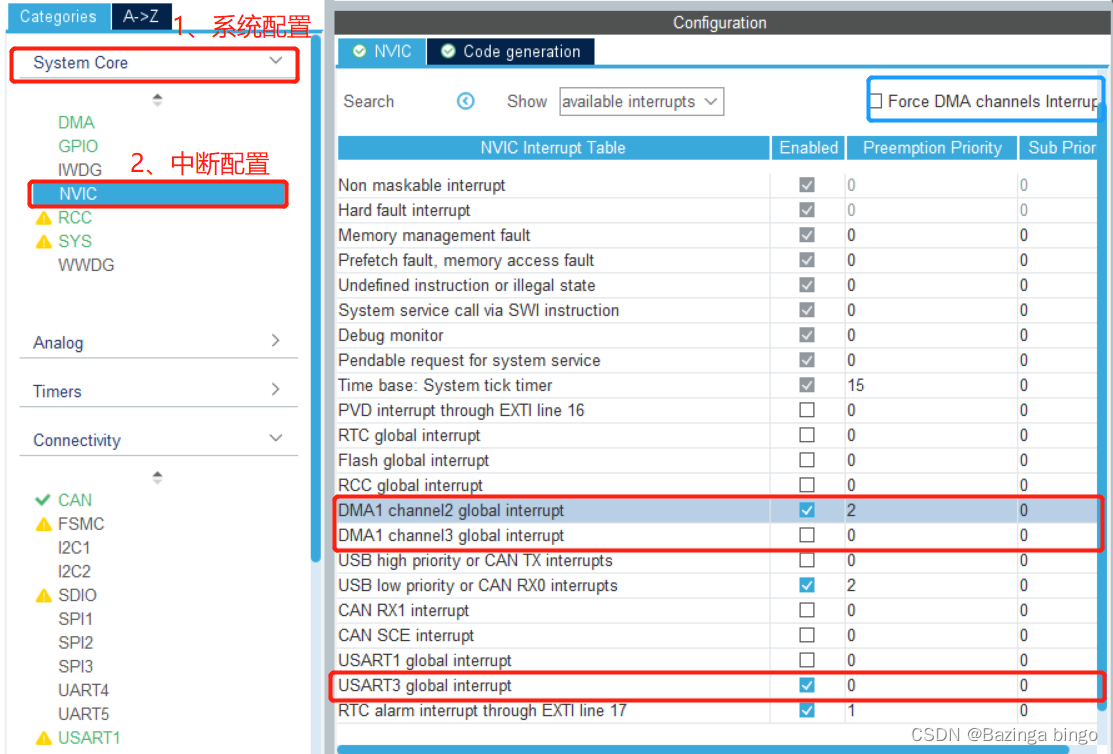
进行NVIC中断等级配置(0等级最高)
上述讲到无法取消DMA接收中断,原因是选中了强制DMA中断(右上角蓝色框,取消对钩就ok)
四、Vscode代码讲解
1、初始化相关中断
#ifdef STM32_F407_RS485_Modbus
printf("----DWB 此程序通过RS-485实现modbus协议----\r\n");
__HAL_UART_ENABLE_IT(&huart3, UART_IT_IDLE); // 使能串口3空闲中断
HAL_UART_Receive_DMA(&huart3, UART3.pucRec_Buffer, UART3_Rec_LENGTH);
#endif
2、RS485 结构体 以及函数实现
typedef struct
{
uint8_t* pucSend_Buffer; //发送缓存指针
uint8_t* pucRec_Buffer; //接收缓存指针
void (*SendArray)(uint8_t*, uint16_t); //串口发送数组
void (*SendString)(uint8_t*); //串口发送字符串
void (*RS485_Set_SendMode)(void); //RS-485接口设置为发送模式
void (*RS485_Set_RecMode)(void); //RS-485接口设置为接收模式
/* data */
} UART_t;
// 串口发数组
static void SendArray(uint8_t* p_Arr,uint16_t LEN)
{
UART3.RS485_Set_SendMode();
HAL_UART_Transmit_DMA(&huart3,p_Arr,LEN);
}
// RS485接口设置发送模式
static void RS485_Set_SendMode()
{
HAL_GPIO_WritePin(RS485_DE_nRE_GPIO_Port, RS485_DE_nRE_Pin,,GPIO_PIN_SET);
}
// RS485接口设置接收模式
static void RS485_Set_RecMode()
{
HAL_GPIO_WritePin(RS485_DE_nRE_GPIO_Port, RS485_DE_nRE_Pin,,GPIO_PIN_RESET);
}
3、RS485 Modbus发送
重构接收回调函数(整个DMA发送过程后面有讲解)
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
if(huart->Instance == huart3.Instance)
{
UART3.RS485_Set_RecMode();
}
}
4、RS485 Modbus接收
接收使用空闲中断 ,在串口总中断中添加空闲中断检测。
void USART3_IRQHandler(void)
{
/* USER CODE BEGIN USART3_IRQn 0 */
if(__HAL_UART_GET_FLAG(&huart3, UART_FLAG_IDLE)) // 判断空闲中断标志位
{
__HAL_UART_CLEAR_IDLEFLAG(&huart3); // 1、清除中断标志位
HAL_UART_IdleCallback(&huart3); // 2、空闲中断回调函数
}
/* USER CODE END USART3_IRQn 0 */
HAL_UART_IRQHandler(&huart3);
/* USER CODE BEGIN USART3_IRQn 1 */
/* USER CODE END USART3_IRQn 1 */
}
在 Drivers/STM32F1xx_HAL_Driver/Inc/stm32f1xx_hal_uart.h 文件中回调函数并没有串口空闲中断回调函数

重构空闲中断回调函数
void HAL_UART_IdleCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == huart3.Instance)
{
Modbus.Protocol_Analysis(&UART3); // 接收数据解析
HAL_UART_Receive_DMA(&huart3, UART3.pucRec_Buffer, UART3_Rec_LENGTH); // 重新开启接收DMA(在数据解析中会暂时关闭接收DMA)
}
}
5、Modbus 收发数据详解
(1)Modbus结构体
typedef struct
{
uint16_t addr;
void (*Protocol_Analysis)(UART_t*);
} Modbus_t;
(2)Modbus接收数据整体框架
#define UART_Order_Index 8
#define FunctionCode_Read_Register 0x03
#define FunctionCode_Write_Register 0x06
#define UART3_Send_LENGTH 20
#define UART3_Rec_LENGTH 20
static void Protocol_Analysis(UART_t* UART)
{
UART_t* const COM_UART = UART;
uint8_t i = 0, Index = 0;
// 1、关闭接收
HAL_UART_AbortReceive(&huart3);
// 2、整理接收数据
for(i=0; i<UART3_Rec_LENGTH; i++)
{
if(Index == 0)
{
if(*(COM_UART->pucRec_Buffer+i) != Modbus.addr)
continue;
}
*(COM_UART->pucRec_Buffer + Index) = *(COM_UART->pucRec_Buffer + i);
// 取7字节
if(Index == UART_Order_Index)
break;
Index++;
}
// 4、校验码
CRC_16.CRC_Value = CRC_16.CRC_Check(COM_UART->pucRec_Buffer, 6);
CRC_16.CRC_H = (u_int8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (u_int8_t)CRC_16.CRC_Value;
if(((*(COM_UART->pucRec_Buffer+6) == CRC_16.CRC_L) && (*(COM_UART->pucRec_Buffer+7) == CRC_16.CRC_H))
||
((*(COM_UART->pucRec_Buffer+6) == CRC_16.CRC_H) && (*(COM_UART->pucRec_Buffer+7) == CRC_16.CRC_L)))
{
//校验地址
if((*(COM_UART->pucRec_Buffer+0)) == Modbus.addr)
{
// 5、数据处理
if((*(COM_UART->pucRec_Buffer+1)) == FunctionCode_Read_Register)
{
Modbus_Read_Register(COM_UART);
}
else if((*(COM_UART->pucRec_Buffer+1)) == FunctionCode_Write_Register)
{
Modbus_Wrtie_Register(COM_UART);
}
}
}
//清缓存
for(i=0;i<UART3_Rec_LENGTH;i++)
{
*(COM_UART->pucRec_Buffer+i) = 0x00;
}
}
Modbus_Read_Register函数数据解析(协议数据:地址码+功能码+数据长度(字节)+发送数据+CRC)连续读取从设备寄存器值返回给主设备。
static void Modbus_Read_Register(UART_t* UART)
{
UART_t* const COM_UART = UART;
//校验地址
if((*(COM_UART->pucRec_Buffer+2) == 0x9C) && (*(COM_UART->pucRec_Buffer+3) == 0x41))
{
回应数据
//地址码
*(COM_UART->pucSend_Buffer+0) = Modbus.addr;
//功能码
*(COM_UART->pucSend_Buffer+1) = FunctionCode_Read_Register;
//数据长度(字节)
*(COM_UART->pucSend_Buffer+2) = 2;
//发送数据
// deep status
*(COM_UART->pucSend_Buffer+3) = 0;
*(COM_UART->pucSend_Buffer+4) = Deep.Read_Deep();
*(COM_UART->pucSend_Buffer+5) = 0;
*(COM_UART->pucSend_Buffer+6) = 0x66;
//插入CRC
CRC_16.CRC_Value = CRC_16.CRC_Check(COM_UART->pucSend_Buffer,7); //计算CRC值
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM_UART->pucSend_Buffer+7) = CRC_16.CRC_L;
*(COM_UART->pucSend_Buffer+8) = CRC_16.CRC_H;
//发送数据
UART3.SendArray(COM_UART->pucSend_Buffer,9);
}
}
Modbus_Wrtie_Register函数数据解析。从主设备获取控制从设备外设的数值,解析后控制外设。
static void Modbus_Wrtie_Register(UART_t* UART)
{
UART_t* const COM_UART = UART;
uint8_t i=0;
//回应数据
for(i=0;i<8;i++)
{
*(COM_UART->pucSend_Buffer+i) = *(COM_UART->pucRec_Buffer+i);
}
//发送数据
UART3.SendArray(COM_UART->pucSend_Buffer,8);
//解析数据,控制外设
if((*(COM_UART->pucRec_Buffer+2) == 0x9C) && (*(COM_UART->pucRec_Buffer+3) == 0x42))
{
if(*(COM_UART->pucRec_Buffer+5) == Deep_Status_ON )
Deep.Deep_Enable();
else
Deep.Deep_Disable();
}
}
为什么要使能DMA发送完成中断才会触发UART的发送完成中断?
答案就在代码里,带大家解析一遍相关代码:
// 调用HAL_UART_Transmit_DMA函数实现DMA发送
HAL_UART_Transmit_DMA
-> huart->hdmatx->XferCpltCallback = UART_DMATransmitCplt; // 设置发送完成回调函数
static void UART_DMATransmitCplt(DMA_HandleTypeDef *hdma)
{
UART_HandleTypeDef *huart = (UART_HandleTypeDef *)((DMA_HandleTypeDef *)hdma)->Parent;
/* DMA Normal mode*/
if ((hdma->Instance->CCR & DMA_CCR_CIRC) == 0U)
{
huart->TxXferCount = 0x00U;
/* Disable the DMA transfer for transmit request by setting the DMAT bit
in the UART CR3 register */
CLEAR_BIT(huart->Instance->CR3, USART_CR3_DMAT);
/* Enable the UART Transmit Complete Interrupt */
SET_BIT(huart->Instance->CR1, USART_CR1_TCIE); // 当DMA发送完成后,会使能串口发送完成中断
}
/* DMA Circular mode */
else
{
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered Tx complete callback*/
huart->TxCpltCallback(huart);
#else
/*Call legacy weak Tx complete callback*/
HAL_UART_TxCpltCallback(huart);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
}
当DMA发送完成后,会使能串口发送完成中断。配置打开UART3中断总开关。
HAL_UART_IRQHandler
-> if (((isrflags & USART_SR_TC) != RESET) && ((cr1its & USART_CR1_TCIE) != RESET))
-> UART_EndTransmit_IT(huart);
-> HAL_UART_TxCpltCallback(huart); // 回调函数为弱函数,可重构
五、结果演示以及报文解析
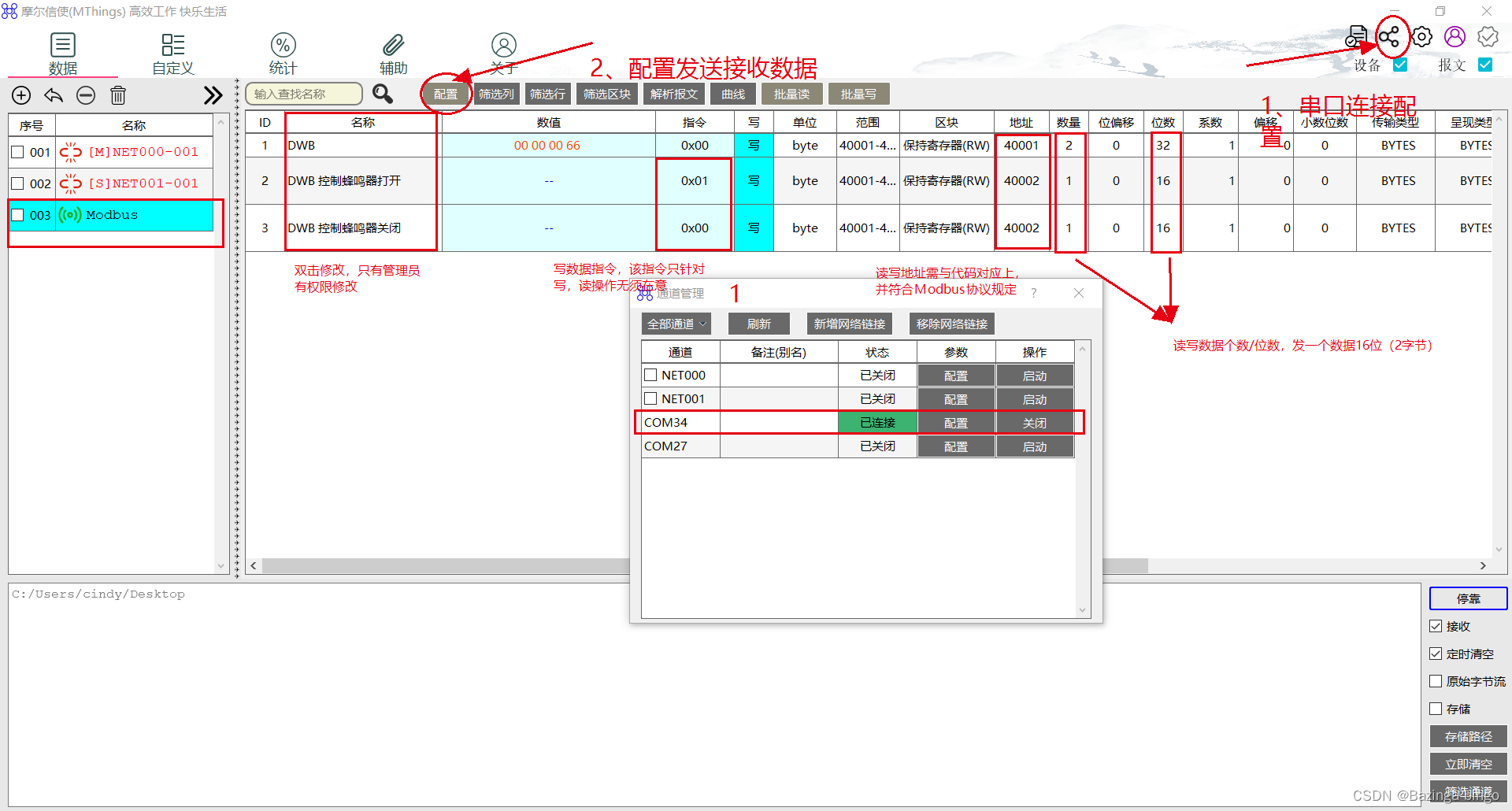
实验测试使用USB转RS485工具。从设备板子上A B接口连接USB转RS485工具上对应A B接口。主设备为PC端安装的MThings进行Modbus收发数据测试。有兴趣的小伙伴可以体验下MTings官网
发送数据报文解析
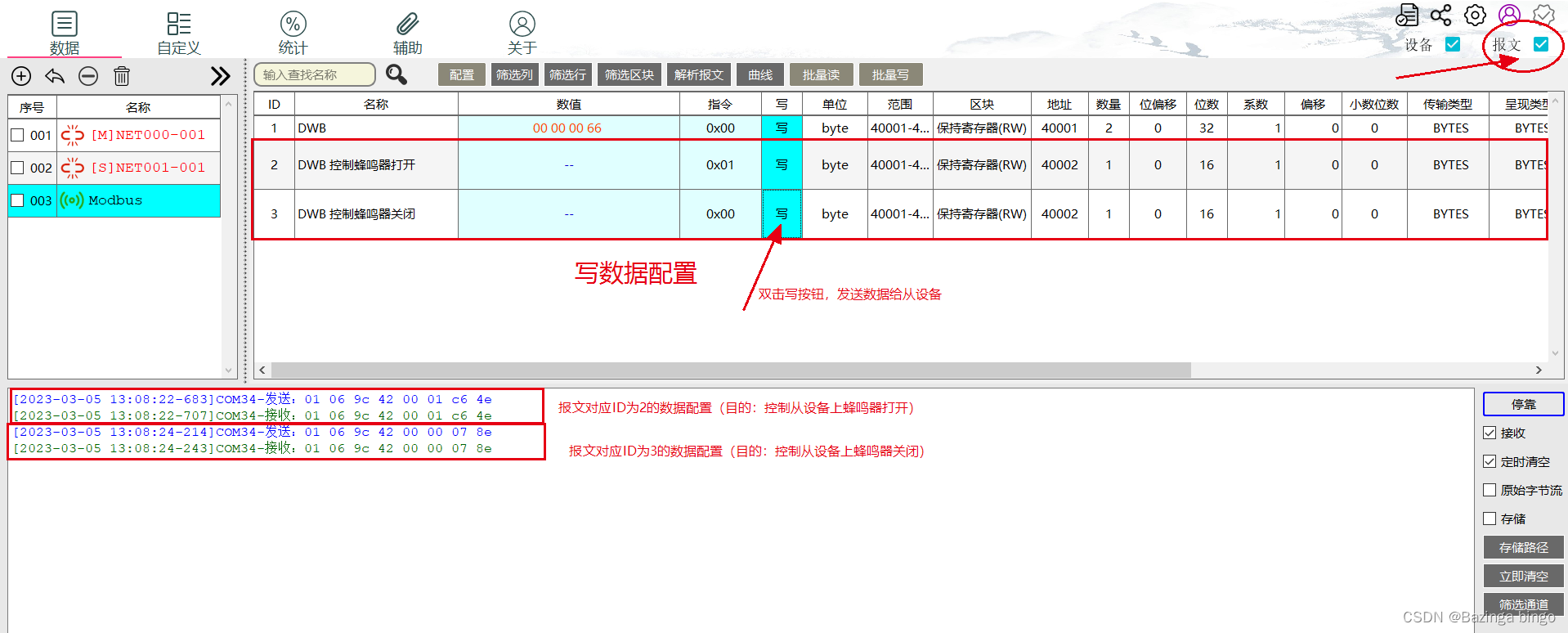
[2023-03-05 13:13:03-802]COM34-发送:01 06 9c 42 00 01 c6 4e
[2023-03-05 13:13:03-827]COM34-接收:01 06 9c 42 00 01 c6 4e
0x01:主机要查询的从设备地址
0x06:功能码 修改写操作
0x9c 0x42:寄存器地址0x9c42转十进制地址为40,002
0x00 0x01:写入地址的数值为0x01 (控制从设备蜂鸣器打开)
0xc6 0x4e:CRC校验码
[2023-03-05 13:13:04-980]COM34-发送:01 06 9c 42 00 00 07 8e
[2023-03-05 13:13:05-012]COM34-接收:01 06 9c 42 00 00 07 8e
0x01:主机要查询的从设备地址
0x06:功能码 修改写操作
0x9c 0x42:寄存器地址0x9c42转十进制地址为40,002
0x00 0x01:写入地址的数值为0x00 (控制从设备蜂鸣器关闭)
0xc6 0x4e:CRC校验码
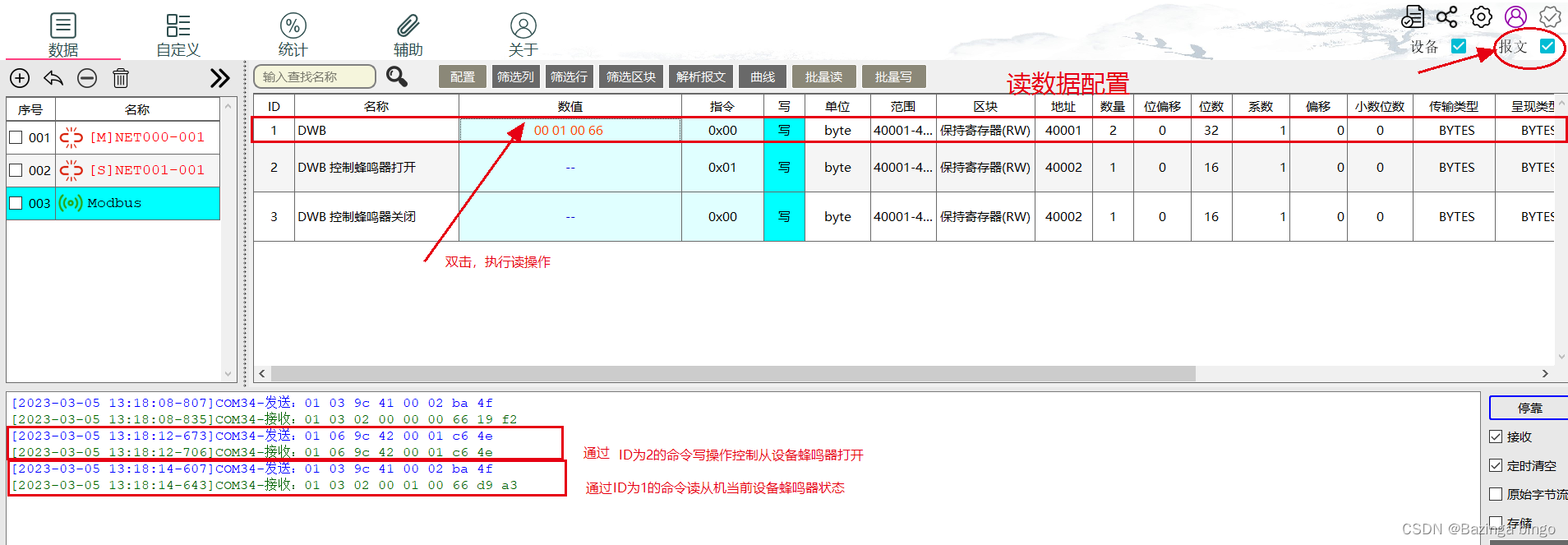
接收数据报文解析
[2023-03-05 13:41:54-954]COM34-发送:01 06 9c 42 00 01 c6 4e
[2023-03-05 13:41:54-977]COM34-接收:01 06 9c 42 00 01 c6 4e
0x01:从设备地址
0x06:功能码 修改写操作
0x9c 0x42:寄存器地址0x9c42转十进制地址为40,002
0x00 0x01:写入地址的数值为0x00 (控制从设备蜂鸣器关闭)
0xc6 0x4e:CRC校验码
[2023-03-05 13:41:56-289]COM34-发送:01 03 9c 41 00 02 ba 4f
0x01:主机要查询的从设备地址
0x03:功能码 查询读操作
0x9c 0x42:寄存器地址0x9c41转十进制地址为40,001
0x00 0x02:读取两个数据(一个数据2字节)
0xba 0x4f:CRC校验码
[2023-03-05 13:41:56-320]COM34-接收:01 03 02 00 01 00 66 d9 a3
0x01:告诉主机自己从设备地址
0x03:功能码 读操作
0x00 0x01:读出第一个数据为0x01,当前蜂鸣器打开状态
0x00 0x66:读取第二个数据为0x66(该值是本猿在代码中写死的值,后续功能会结合本章节modbus功能通信,敬请期待)
0xd9 0xa3:CRC校验码



![[一篇读懂]C语言十一讲:单链表的删除和单链表真题实战](https://img-blog.csdnimg.cn/9316603659cc4974993d65ce035aa358.png#pic_center)