前言
前边077带着大家学习了树与二叉树的相关概念,这篇文章我们来实现一个二叉树的顺序结构。
二叉树的顺序结构
普通的二叉树是不适合用数组来存储的,因为可能会存在大量的空间浪费。而完全二叉树更适合使用顺序结 构存储。现实中我们通常把堆(一种二叉树)使用顺序结构的数组来存储,需要注意的是这里的堆和操作系统 虚拟进程地址空间中的堆是两回事,一个是数据结构,一个是操作系统中管理内存的一块区域分段。
与前边的栈类似,数据结构中的堆与地址空间的堆是完全不同的,是两个学科中的名词。

堆的概念及结构
将根节点最大的堆叫做最大堆或大根堆,根节点最小的堆叫做最小堆或小根堆。
堆的性质:堆中某个节点的值总是不大于或不小于其父节点的值;堆总是一棵完全二叉树。
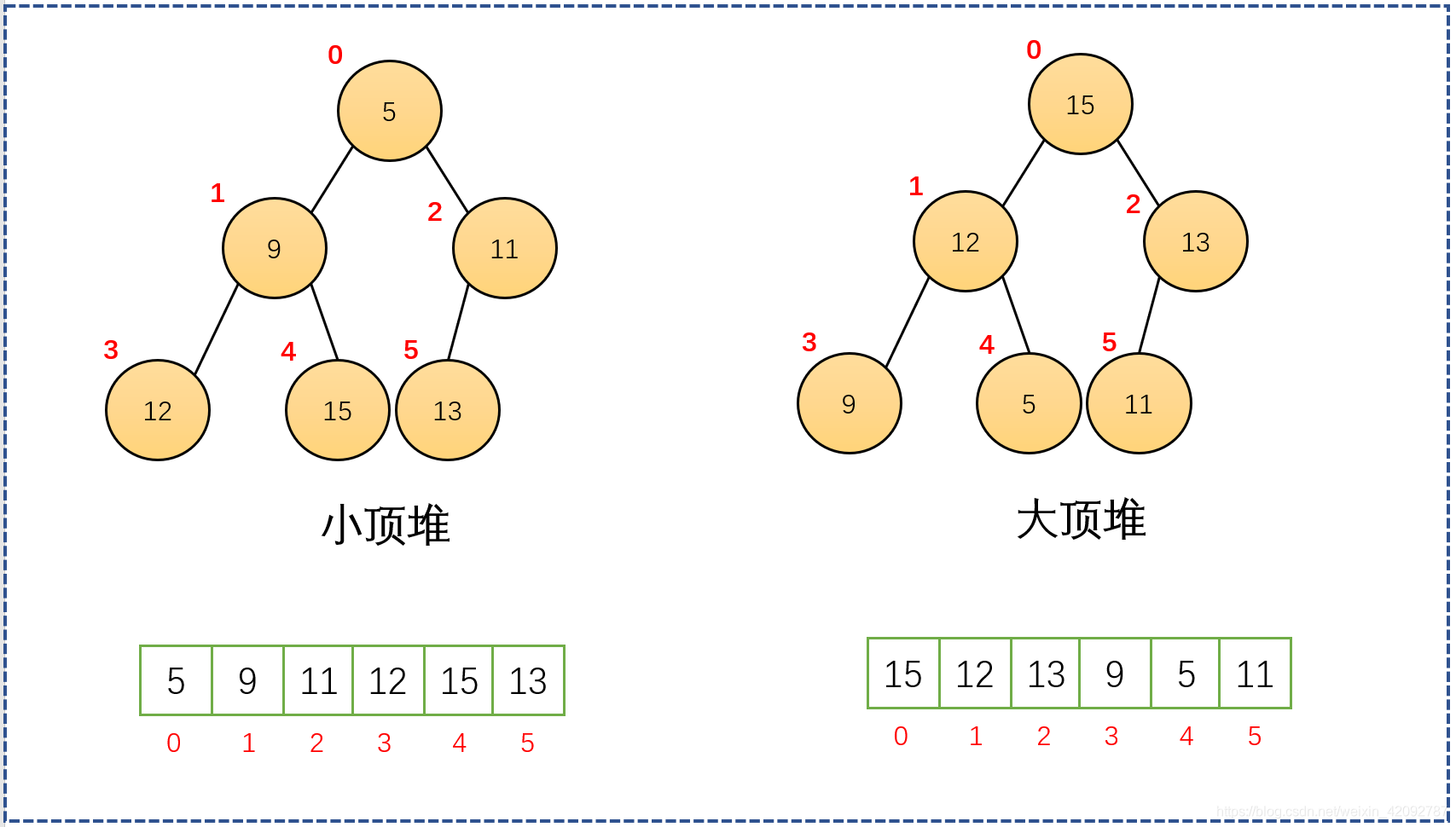
小堆,又叫小根堆,小顶堆,顾名思义就是这个堆的根节点数据是最小的,而且每一个父节点的数据都要小于子节点的数据,有一个不满足都不是小堆。
大堆就是根节点最大的堆,堆中每一个父节点的数据都是大于子结点的数据。
堆的实现
堆的接口实现
1.堆的结构
typedef int hpDataType;
typedef struct heap
{
hpDataType* a;
int size;
int capacity;
}hp;
堆是顺序的二叉树,所以要定义一个顺序表,在物理上就是一个顺序表,在逻辑上确是一个二叉树,也就是堆。
2.初始化
void hpInit(hp* ph)
{
assert(ph);
ph->a = NULL;
ph->capacity = ph->size = 0;
}3.销毁顺序表
void hpDestory(hp* ph)
{
assert(ph);
free(ph->a);
ph->a = NULL;
ph->capacity = ph->size = 0;
}4.向上调整
void adjustUp(hpDataType* a, int child)
{
int parent = (child - 1) / 2;
while (child > 0)
{
if (a[child] > a[parent])
{
int tmp = a[child];
a[child] = a[parent];
a[parent] = tmp;
child = parent;
parent = (child - 1) / 2;
}
else
{
break;
}
}
}使用向上调整算法可以随意插入数据,并且还不改变堆,还为一个小堆或者大堆,我这里实现的是一个大堆。
5.堆的插入
void hpPush(hp* ph, hpDataType x)
{
assert(ph);
if (ph->size == ph->capacity)
{
hpDataType newCapacity = ph->capacity == 0 ? 4 : ph->capacity * 2;
hpDataType* tmp = (hpDataType*)realloc(ph->a, sizeof(hpDataType)*newCapacity);
if (tmp == NULL)
{
perror("realloc fail/n");
exit(-1);
}
ph->a = tmp;
ph->capacity = newCapacity;
}
ph->a[ph->size] = x;
ph->size++;
adjustUp(ph->a, ph->size - 1);
}在堆中插入数据的前提是不改变堆的性质,使其还是一个堆,所以我们可以在最后一个位置处插入数据,再调用向上调整函数来实现插入,当然与顺序表相同的是,当容量不够时我们要进行扩容操作。
6.向下调整算法
void adjustDown(hpDataType* a, int size, int parent)
{
int child = parent * 2 + 1;
//调整到没有孩子结点
while (child < size)
{
if (child + 1 < size && a[child + 1] < a[child])
{
child++;
}
if (a[child] < a[parent])
{
swap(&a[parent], & a[child]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}我们使用向下调整函数也可以实现大堆和小堆,当某一节点不存在孩子结点时,向下调整结束,由于一个父节点存在左子树和右子树,所以我们在调整时,应该判断左右子树数据的大小并且判断右子树是否存在,来决定child的位置,再比较与父节点的位置来交换父节点与孩子结点。
7.堆的删除
void hpPop(hp* ph)
{
assert(ph);
assert(!hpEmpty(ph));
swap(&ph->a[ph->size - 1], &ph->a[0]);
ph->size--;
adjustDown(ph->a, ph->size, 0);
}堆中数据的删除实际上指的是将堆顶数据进行删除,我们要进行的操作是将堆中最后一个数与堆顶元素互换,然后将堆的数据个数减一,这样就删除了堆顶元素,但是此时可能改变了堆的结构,我们再使用向下调整算法,调整根节点就能恢复了。
8.判空
bool hpEmpty(hp* ph)
{
assert(ph);
return ph->size == 0;
}9.取堆顶数据
hpDataType hpTop(hp* ph)
{
assert(ph);
assert(!hpEmpty(ph));
return ph->a[0];
}10.打印堆中数据
void hpPrint(hp* hp)
{
for (int i = 0; i < hp->size; ++i)
{
printf("%d ", hp->a[i]);
}
printf("\n");
}源码
heap.h
#include<stdlib.h>
#include<stdbool.h>
#include<time.h>
typedef int hpDataType;
typedef struct heap
{
hpDataType* a;
int size;
int capacity;
}hp;
void adjustUp(hpDataType* a, int child);
void adjustDown(hpDataType* a, int size, int child);
void swap(int* px, int* py);
void hpInit(hp* ph);
void hpDestory(hp* ph);
void hpPush(hp* ph, hpDataType x);
void hpPop(hp* ph);
bool hpEmpty(hp* ph);
void hpPrint(hp* ph);
hpDataType hpTop(hp* ph);
heap.c
#define _CRT_SECURE_NO_WARNINGS 1
#include"heap.h"
void swap(int* px, int* py)
{
int tmp = *px;
*px = *py;
*py = tmp;
}
void adjustUp(hpDataType* a, int child)
{
int parent = (child - 1) / 2;
//调整到孩子结点就是根节点结束
while (child > 0)
{
if (a[child] > a[parent])
{
int tmp = a[child];
a[child] = a[parent];
a[parent] = tmp;
child = parent;
parent = (child - 1) / 2;
}
else
{
break;
}
}
}
void adjustDown(hpDataType* a, int size, int parent)
{
int child = parent * 2 + 1;
//调整到没有孩子结点
while (child < size)
{
if (child + 1 < size && a[child + 1] < a[child])
{
child++;
}
if (a[child] < a[parent])
{
swap(&a[parent], & a[child]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
void hpInit(hp* ph)
{
assert(ph);
ph->a = NULL;
ph->capacity = ph->size = 0;
}
void hpDestory(hp* ph)
{
assert(ph);
free(ph->a);
ph->a = NULL;
ph->capacity = ph->size = 0;
}
void hpPush(hp* ph, hpDataType x)
{
assert(ph);
if (ph->size == ph->capacity)
{
hpDataType newCapacity = ph->capacity == 0 ? 4 : ph->capacity * 2;
hpDataType* tmp = (hpDataType*)realloc(ph->a, sizeof(hpDataType)*newCapacity);
if (tmp == NULL)
{
perror("realloc fail/n");
exit(-1);
}
ph->a = tmp;
ph->capacity = newCapacity;
}
ph->a[ph->size] = x;
ph->size++;
adjustUp(ph->a, ph->size - 1);
}
void hpPop(hp* ph)
{
assert(ph);
assert(!hpEmpty(ph));
swap(&ph->a[ph->size - 1], &ph->a[0]);
ph->size--;
adjustDown(ph->a, ph->size, 0);
}
bool hpEmpty(hp* ph)
{
assert(ph);
return ph->size == 0;
}
void hpPrint(hp* hp)
{
for (int i = 0; i < hp->size; ++i)
{
printf("%d ", hp->a[i]);
}
printf("\n");
}
hpDataType hpTop(hp* ph)
{
assert(ph);
assert(!hpEmpty(ph));
return ph->a[0];
}
test.c
#define _CRT_SECURE_NO_WARNINGS 1
#include"heap.h"
void test()
{
hp h;
hpInit(&h);
int a[] = { 70, 56, 30, 25, 15, 10, 1 };
for (int i = 0; i < sizeof(a) / sizeof(a[0]); ++i)
{
hpPush(&h, a[i]);
}
hpPrint(&h);
hpDestory(&h);
}
int main()
{
test();
//testTopk();
return;
}