认识MQ-7模块与其工作原理
首先来认识MQ-7模块,MQ-7可以检测空气中的一氧化碳(CO)浓度。他采用半导体气敏元件来检测CO的气体浓度,其灵敏度高、反应速度快、响应时间短、成本低廉等特点使得它被广泛应用于智能家居、工业自动化、环保检测等领域。
MQ-7模块的工作原理基于半导体材料在气体作用下发生电学性质的变化,通过测量这种变化来检测气体浓度。具体来说,MQ-7烟雾传感器内部有一块小小的加热器,通过电流加热,使得传感器的工作环境温度升高,同时加速气体分子的运动。模块中的半导体气敏元件表面涂有一层特殊的金属氧化物,当在特定温度下,空气中的CO气体与金属氧化物接触时,会发生氧化还原反应,使得金属氧化物表面的电阻发生变化,当空气中的CO浓度增加时,电阻减小,从而输出一个模拟信号。
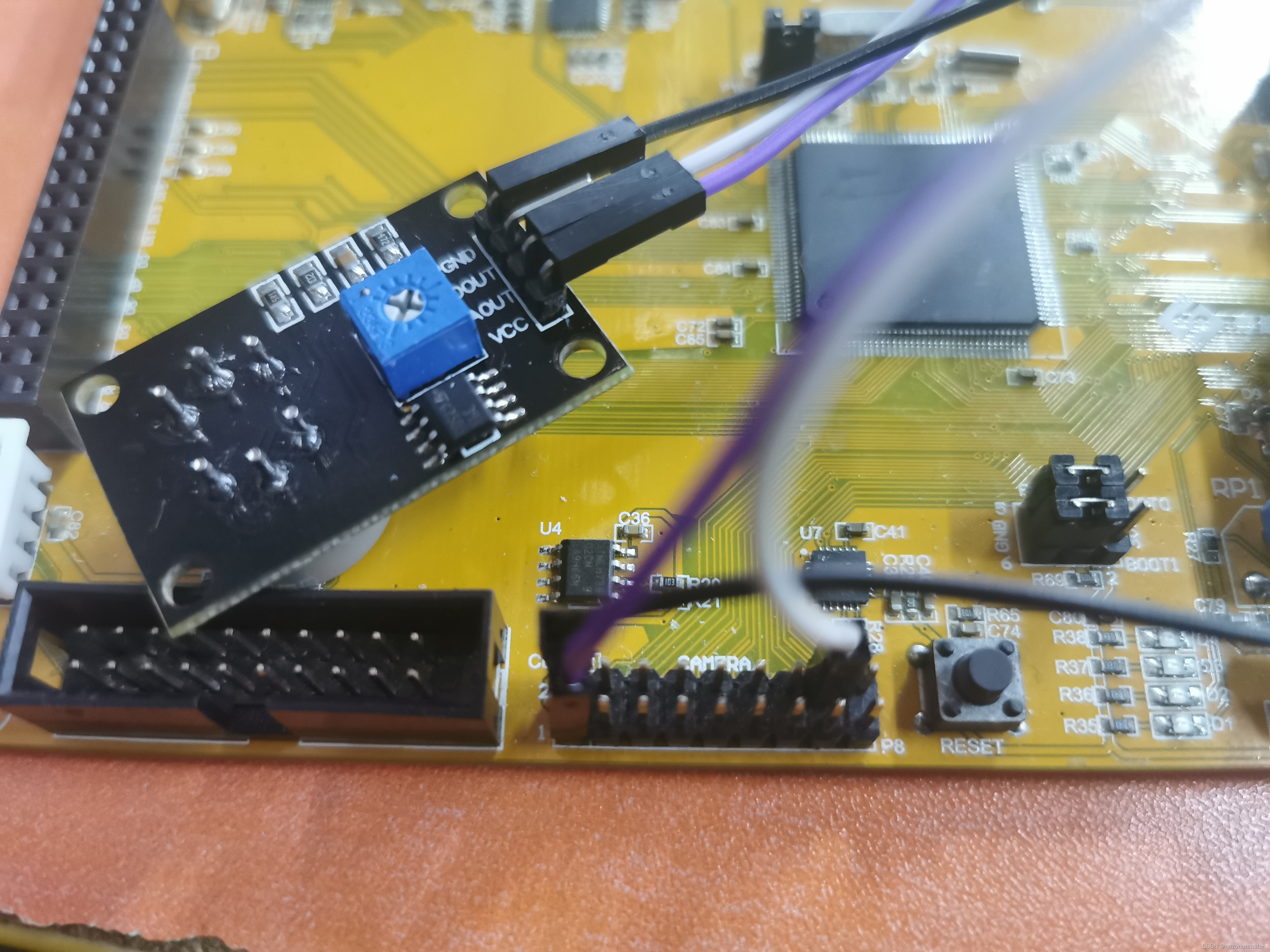
回到MQ-7模块上,MQ-7一共有4个引脚,分别是GND、DOUT、AOUT和VCC。VCC是电源引脚,用于给模块供电,可以理解为正极,一般接3.3V或者5V。GND连接模块的地线,可以理解为是负极,通常是0V。DOUT是数字输出引脚,用于输出数字信号。AOUT是模拟输出引脚,用于输出模拟信号。我们一般使用AOUT引脚也就是读取模块输出的模拟信号。
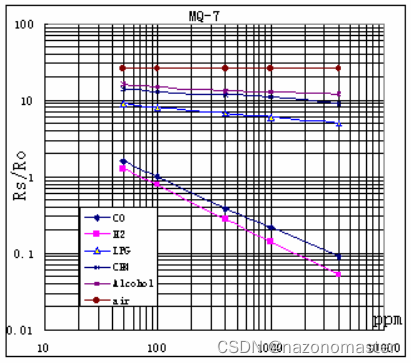
32单片机则是可以通过模数转换器(ADC)读取传感器输出的模拟电压信号,而我们需要做的则是根据传感器特性曲线函数将电压值转换为一氧化碳浓度值。
模块与32单片机的连接
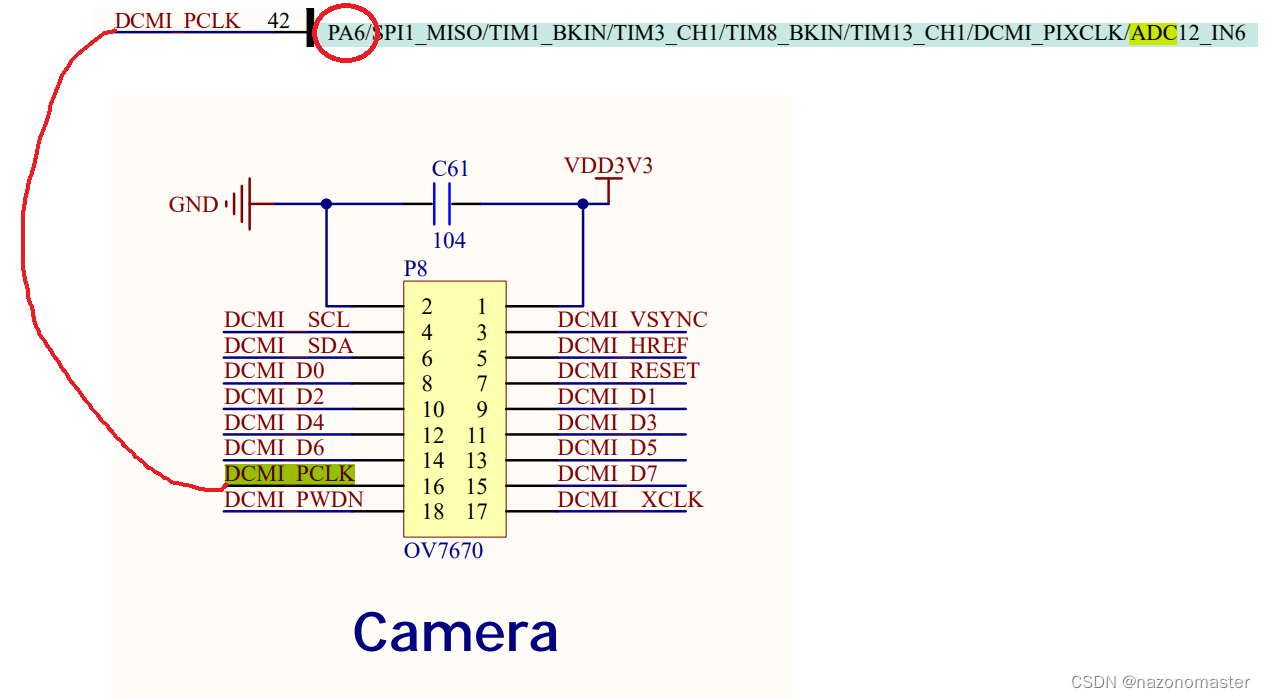
这里我使用的单片机型号为STM32F407ze,上面也说过,要获得MQ-7测量的数据就要使用模数转换器(ADC),所以需要选择具有ADC功能的引脚,哪一个引脚拥有ADC功能可以通过查阅单片机的资料可知。
通过查阅资料,我选择具有ADC功能的PA6引脚,PA6与CAMERA的第16引脚相连,所以只需要将MQ-7的AOUT引脚通过杜邦线接到CAMERA的第16引脚即可。剩下的就是接电源线了,因为CAMERA的第1引脚可以输出3.3V的电压,第2引脚接地,所以只需要将模块的VCC与GND与他们相连即可。
代码功能实现
代码上的大致思路为:定义模块引脚和ADC后,首先获取ADC在一定时间内的平均值,其次,可以利用公式将ADC的平均值转化为MQ-7的输出电压值,接着根据这个电压信号和传感器特性曲线计算出CO的浓度。
ADC部分
adc.c
因为要使用ADC功能,所以此段代码第一个函数用于定义使用ADC的引脚和功能,第二个函数用于获取ADC的值。
#include "adc.h"
void adc_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_CommonInitTypeDef ADC_CommonInitStructure;
ADC_InitTypeDef ADC_InitStructure;
// 使能 ADC 引脚的 GPIO 时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
// 将 ADC 引脚配置为模拟输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 使能 ADC2 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC2, ENABLE);
/* ADC的常规配置 */
ADC_CommonInitStructure.ADC_Mode = ADC_Mode_Independent; //独立模式
ADC_CommonInitStructure.ADC_Prescaler = ADC_Prescaler_Div2; //84MHZ/2 = 42MHZ
ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled; //禁止MDA
ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles; //ADC通道采用间隔
ADC_CommonInit(&ADC_CommonInitStructure);
// ADC初始化
ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;//分辨率
ADC_InitStructure.ADC_ScanConvMode = DISABLE;//禁止扫描
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;//连续转换模式
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;//不需要外部触发
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//数据右对齐
ADC_InitStructure.ADC_NbrOfConversion = 1;//一次转换
ADC_Init(ADC2, &ADC_InitStructure);
//ADC2的采样通道6放入规则通道1中
ADC_RegularChannelConfig(ADC2, ADC_Channel_6, 1, ADC_SampleTime_3Cycles);
// 使能 ADC2
ADC_Cmd(ADC2, ENABLE);
// 初始化 ADC2
ADC_SoftwareStartConv(ADC2);
}
//获得 ADC 值
uint16_t ADC_Read(void)
{
// 开始转换
ADC_SoftwareStartConv(ADC2);
// 等到转换完成
while (ADC_GetFlagStatus(ADC2, ADC_FLAG_EOC) == RESET);
// 获取转换结果
return ADC_GetConversionValue(ADC2);
}
adc.h
#ifndef _ADC_H
#define _ADC_H
//C文件中需要的其他的头文件
#include <stm32f4xx.h>
#include "sys.h"
#include "delay.h"
//C文件中定义的函数的声明
void adc_Init(void);
uint16_t ADC_Read(void);
#endif
MQ-7部分
MQ7.c
#include "mq7.h"
#define CAL_PPM 10 // 校准环境中PPM值
#define RL 10 // RL阻值
#define R0 16 // R0阻值
u16 MQ7_Buffer[4];
void CO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);//使能PA的时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //PA6 模拟输入引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN; //输入模式
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //上下拉电阻:无上下拉电阻
GPIO_Init(GPIOA, &GPIO_InitStructure);
adc_Init();
}
//计算平均值
u16 ADC2_Average_Data(u8 ADC_Channel)
{
u16 temp_val=0;
u8 t;
for(t=0;t<CO_READ_TIMES;t++) //#define CO_READ_TIMES 10 定义烟雾传感器读取次数,读这么多次,然后取平均值
{
temp_val+=ADC_Read(); //读取ADC值
delay_ms(5);
}
temp_val/=CO_READ_TIMES;//得到平均值
return (u16)temp_val;//返回算出的ADC平均值
}
//float voltage = adc_value * (3.3 / 4096.0); 将ADC值转换为电压
/***********************************
计算Rs的两种公式
float Rs = (3.3 * RL) / voltage - RL; 计算传感器的电阻 RL:负载电阻阻值
float RS = (3.3f - voltage) / voltage * RL;
************************************/
//float co_ppm = a * pow(Rs/R0, b); 使用校准曲线计算一氧化碳浓度
//a, b是MQ-7传感器模块校准曲线的系数.其值来源于MQ7的手册资料,a = 98.322, b = -1.458
//R0是器件在洁净空气中的电阻值,来自于MQ-7灵敏度特性曲线,R0 = RS / pow(CAL_PPM / 98.322, 1 / -1.458f);
//读取MQ7传感器的电压值
float CO_Get_Vol()
{
u16 adc_value = 0;//这是从MQ-7传感器模块电压输出的ADC转换中获得的原始数字值,该值的范围为0到4095,将模拟电压表示为数字值
float voltage = 0;//MQ-7传感器模块的电压输出,与一氧化碳的浓度成正比
adc_value = ADC2_Average_Data(ADC_Channel_6);
delay_ms(5);
voltage = (3.3/4096.0)*(adc_value);
return voltage;
}
/*********************
// 传感器校准函数,根据当前环境PPM值与测得的RS电压值,反推出R0值。
// 经过个人测试,在空气中测出R0为16
float MQ7_PPM_Calibration()
{
float RS = 0;
float R0 = 0;
RS = (3.3f - Smog_Get_Vol()) / Smog_Get_Vol() * RL;//RL 10 // RL阻值
R0 = RS / pow(CAL_PPM / 98.322, 1 / -1.458f);//CAL_PPM 10 // 校准环境中PPM值
return R0;
}
**********************/
// 根据公式计算CO_ppm
float MQ7_GetPPM()
{
float RS = (3.3f - CO_Get_Vol()) / CO_Get_Vol() * RL;
float ppm = 98.322f * pow(RS/R0, -1.458f);
return ppm;
}
mq7.h
#ifndef _MQ7_H
#define _MQ7_H
//C文件中需要的其他的头文件
#include <stm32f4xx.h>
#include "sys.h"
#include "delay.h"
#include "math.h"
#include "adc.h"
#define SMOG_PIN46_R 1000 //烟雾传感器管脚4、6接出到地的电阻值
#define CO_READ_TIMES 10 //定义CO传感器读取次数,读这么多次,然后取平均值
//C文件中定义的函数的声明
void CO_Init(void);
u16 ADC2_Average_Data(u8 ADC_Channel);
float CO_Get_Vol(void);
//float MQ7_PPM_Calibration();
float MQ7_GetPPM(void);
#endif
主函数部分
在主函数中调用 MQ7_GetPPM() 函数即可。
#include <stm32f4xx.h>
#include "sys.h"
#include <stdio.h>
#include "delay.h"
#include "uart.h"
#include "mq7.h"
//重定向fputc函数
int fputc(int ch, FILE *F)
{
//通过串口1发送数据到PC
USART_SendData(USART1, ch);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);//等待发送数据完毕
return ch;
}
u8 Smog_yu = 30;//Smog的阈值
int main(void)
{
float CO_ppm = 0;
//确定系统定时器的工作频率 内核的工作频率/8 = 168MHz/8 = 21MHz
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
UART1_Config();//配置串口
CO_Init();//配置CO模块
while(1)
{
CO_ppm = MQ7_GetPPM();
printf("CO_ppm:%.3f CO阈值:%d\n",CO_ppm, CO_yu);
}
return 0;
}









![[经验分享]gpt-3.5-Turbo|unity中实现http接口调用gpt新接口以及信息处理的实现案例分享](https://img-blog.csdnimg.cn/img_convert/35b82fcdfff6cc865aa0822e7ee2df54.png)
