自动驾驶目标检测项目实战——基于深度学习框架yolov的交通标志检测
目前目标检测算法有很多,流行的就有faster-rnn和yolov,本文使用了几年前的yolov3框架进行训练,效果还是很好,当然也可以使用更高版本的Yolov进行实战。本代码使用的是keras框架,pytorch的yolov如何对数据集进行训练,可以参考我之前的文章:
工业缺陷检测项目实战(二)——基于深度学习框架yolov5的钢铁表面缺陷检测
跑工程的原理步骤都是一样的,都可以学习。
数据集准备
使用gtsrb交通标志数据集,下载链接:
https://www.kaggle.com/datasets/meowmeowmeowmeowmeow/gtsrb-german-traffic-sign
https://aistudio.baidu.com/aistudio/datasetdetail/97069
以上两个链接都可以下载,文件夹里面是这样:
Meta没什么用,主要是Test和Train,Test作为验证集使用。
基础代码准备
本工程基于开源代码进行修改:
https://github.com/miemie2013/Keras-DIOU-YOLOv3
环境
tensorflow==1.15.1
keras==2.3.1
其他看着来,缺什么pip install什么。
使用步骤
1.将数据集放在工程文件夹
2.生成train和test的txt文件
我这里写了一个csv转txt的代码:
代码如下:
import numpy as np
import pickle
import re
import os
from PIL import Image
# Create raw data pickle file
data_raw = {}
class_list = []
box_coords_list = []
image_file_list = []
with open('GTSRB/Test.csv', 'r') as f:
next(f) # skip header line
for line in f: # 遍历每一行
line = line[:-1] # 去掉换行符
fields = line.split(',')
image_file = fields[7]
class_list.append(int(fields[6]))
image_file_list.append(image_file)
# Find box coordinates for all signs in this image
box_coords = np.array([int(x) for x in fields[2:6]])
box_coords_list.append(box_coords)
# 写入txt内容
with open("GTSRB/val.txt", 'w+', encoding='utf-8') as f:
for i in range(len(box_coords_list)):
box_coord = ""
box_coord += str(box_coords_list[i][0]) + ','
box_coord += str(box_coords_list[i][1]) + ','
box_coord += str(box_coords_list[i][2]) + ','
box_coord += str(box_coords_list[i][3])
d = image_file_list[i] + ' ' + box_coord + ',' + str(class_list[i])
f.write(d + '\n')
路径根据自己的去修改即可。生成的txt放在annotation文件夹下。
txt文件格式如下:
xxx/xxx.jpg 18.19,6.32,424.13,421.83,20 323.86,2.65,640.0,421.94,20
xxx/xxx.jpg 48,240,195,371,11 8,12,352,498,14
# image_path x_min, y_min, x_max, y_max, class_id x_min, y_min ,..., class_id
# make sure that x_max < width and y_max < height
3.生成标签的类别txt文件
在data文件夹下,生成txt的文件来表示类名:
比如这里有43个类,则我们可以先用数字字符表示,等检测完再转回对于的类名:
一行表示一个类名,注意此处类名不能有空格,比如以下是错误的例子:
每一行都存在空格,这样在计算mAP的时候会报错。
数据已准备完毕。
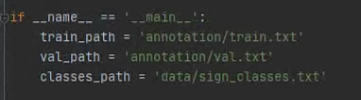
4.修改文件路径
主要是修改train.py文件里面的这三个路径:
5.训练
运行
python train.py
6.注意
引用github源码大佬的话:
(1)本仓库有pattern=0、pattern=1、pattern=2这3种训练模式。 0-从头训练,1-读取model_body继续训练(包括解冻,但需要先运行1_lambda2model.py脚本取得model_body),2-读取coco预训练模型训练 你只需要修改pattern的值即可指定训练模式。 然后在这3种模式的if-else分支下,你再指定批大小batch_size、学习率lr等超参数。
(2)如果你决定从头训练一个模型(即pattern=0),而且你的显卡显存比较小,比如说只有6G。 又或者说你想训练一个小模型,因为你的数据集比较小。 那么你可以设置initial_filters为一个比较小的值,比如说8。 initial_filters会影响到后面的卷积层的卷积核个数(除了最后面3个卷积层的卷积核个数不受影响)。 yolov3的initial_filters默认是32,你调小initial_filters会使得模型变小,运算量减少,适合在小数据集上训练。
7.训练完之后,可以得到以下h5文件:
运行
python 1_lambda2model.py
将训练模型中yolov3的所有部分提取出来。我这里得到aaaa_bgr.h5
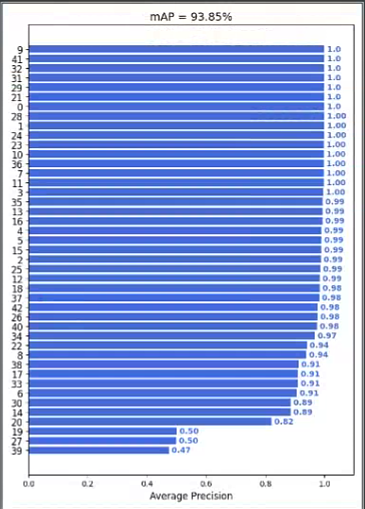
8.mAP评估
运行evaluate_kr.py对keras模型(1_lambda2model.py提取出来的模型)评估,跑完这个脚本后需要再跑mAP/main.py进行mAP的计算。计算完之后会保持结果图:
9.测试
在images/test里面放置要检测的图片:
运行
python demo_kr.py
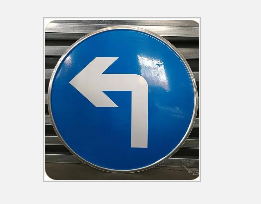
比如识别:
识别结果:
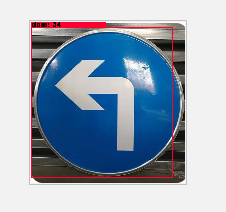
另外,我添加了绘制acc和loss的曲线图,也对过滤了识别分数地的框。
需要整体代码的可私信我