摘要:目前各种PID控制器仪表常用于简单的设定点(Set Point)和斜坡(Ramp)程序控制,但对于复杂的正弦波等周期性变量的控制则无能为力。为了采用标准PID控制器便捷和低成本的实现对正弦波等周期性变量的自动控制,本文介绍相应的解决方案。解决方案的主要内容一是采用具有远程设定点功能的PID控制器,二是采用外置信号发生器,发生器输出的周期信号作为PID控制器周期性改变的设定值,从而实现周期性变量的自动控制。
原文阅读:(PDF格式)
1. 问题的提出
在各种科研生产中经常会设计一些周期性的温度、湿度、真空压力和振动等交变环境或边界条件来进行各种特定的测试和考核,这些周期性边界条件或环境所呈现出的常见形式往往会是方波、正弦波,三角波和梯形波等,这在各种物理参数的动态测试和产品构件的性能考核试验过程中体现的尤为明显,由此就要求相应的自动化系统能提供这些不同波形环境变量的准确控制,从而保证实际环境的变化与测试及试验数学模型对边界条件的描述尽可能的吻合,最终保证物理变量测试以及考核试验的准确性和可靠性。
在各种温度、湿度、真空压力和振动等环境的形成和自动化控制过程中,基本都是采用各种小巧的工业级PID控制器和PLC可编程逻辑控制器,这些控制器非常适用于定点或变化速度较慢的线性变化控制,图1(a)所示就是这样一个非常典型温度控制变化过程曲线。
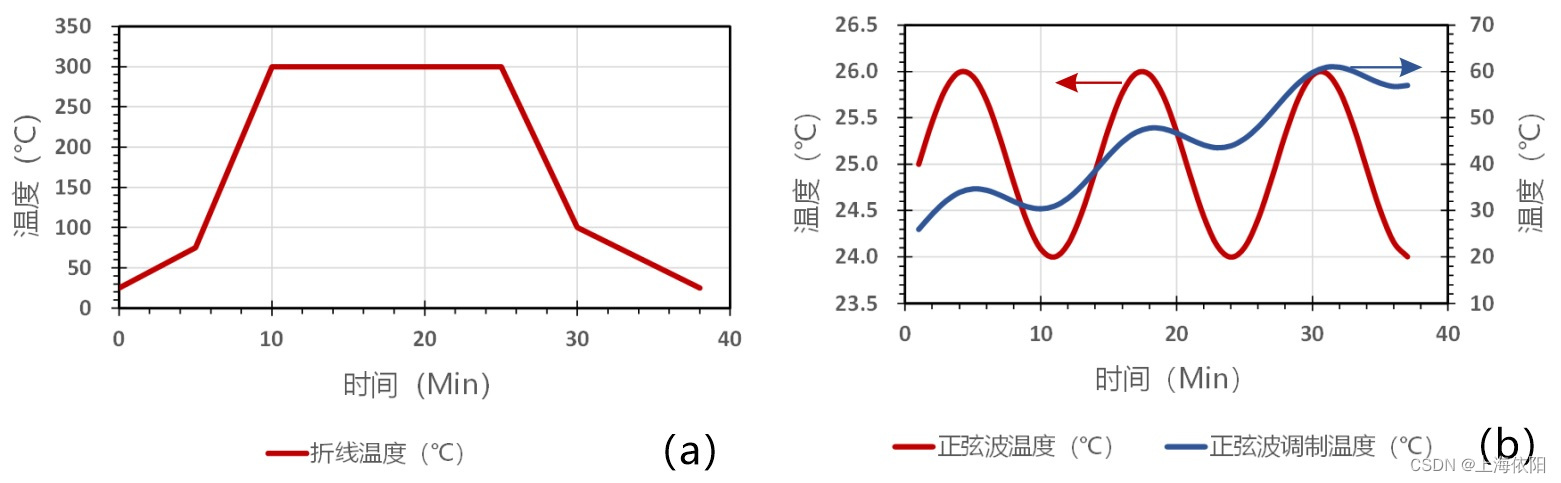
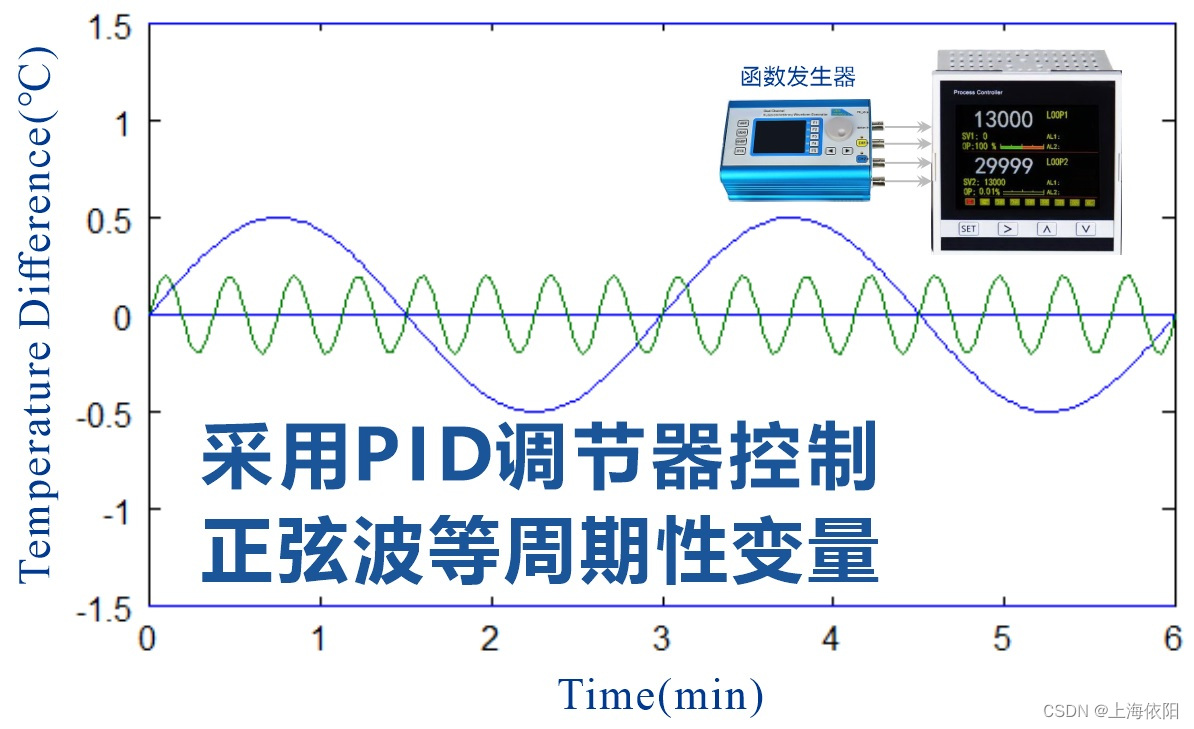
对于图1(a)所示的典型温度变化过程,采用普通的PID程序控制器进行编程设计就可以实现,并且还可以编辑多条这样的多折线控制程序进行存储和调用运行。但对于如图1(b)所示的正弦波形式的温度控制和线性升温加正弦波调制的温度控制,目前还未看到可进行这种周期性变量控制的标准化PID控制器。为了在实际应用中实现这种周期性变量的PID控制,往往需要采用计算机和PLC并进行复杂的控制程序编写才能实现这种复杂功能,但这具有较高的技术门槛。
为了解决上述PID控制器对于复杂正弦波等周期性变量控制的无能为力,并能采用标准PID控制器便捷和低成本的实现对正弦波等周期性变量的自动控制,本文将提出以下解决方案。
2. 解决方案
PID调节器进行自动控制的基本原理是根据设定值与被控对象测量值之间的控制偏差,将偏差按比例、积分和微分通过线性组合形成控制输出量,对被控对象进行控制。这里的设定值是一种泛指,实际上包括了不随时间变化的固定设定值和随时间变化的设定曲线。
由此可见,对于PID控制器要实现自动控制的必要前提是要已知被控对象的变化要求,并将此要求按照设定值曲线输入给PID控制器。通常的设定曲线如图1(a)所示,它可以通过设定不同的爬升速率构成控制程序曲线。如果采用此方式来进行如图1(b)所示正弦波那样的周期性被控对象,则需要设计很多个小折线才能准确代表波形曲线,而在实际应用中还需能不断调整被动对象的波幅和频率,由此可见采用这种折线方式来对正弦波类周期性变化被动对象进行设定值近似无可操作性。总之,这种问题最终可以归结到如何使得PID控制器的设定值变得符合周期性函数特征,并可以很方便的进行波形、波幅和频率的更改。
为了可以很方便的将PID控制器设定值按照所需的函数波形进行设置,本文提出的解决方案具体内容如下:
(1)采用具有外部设定点功能的PID控制器,即PID控制器所接收到的外部任意波形信号都可以作为设定值。
(2)外置一个函数信号发生器,给PID控制器传输所需的波形信号。
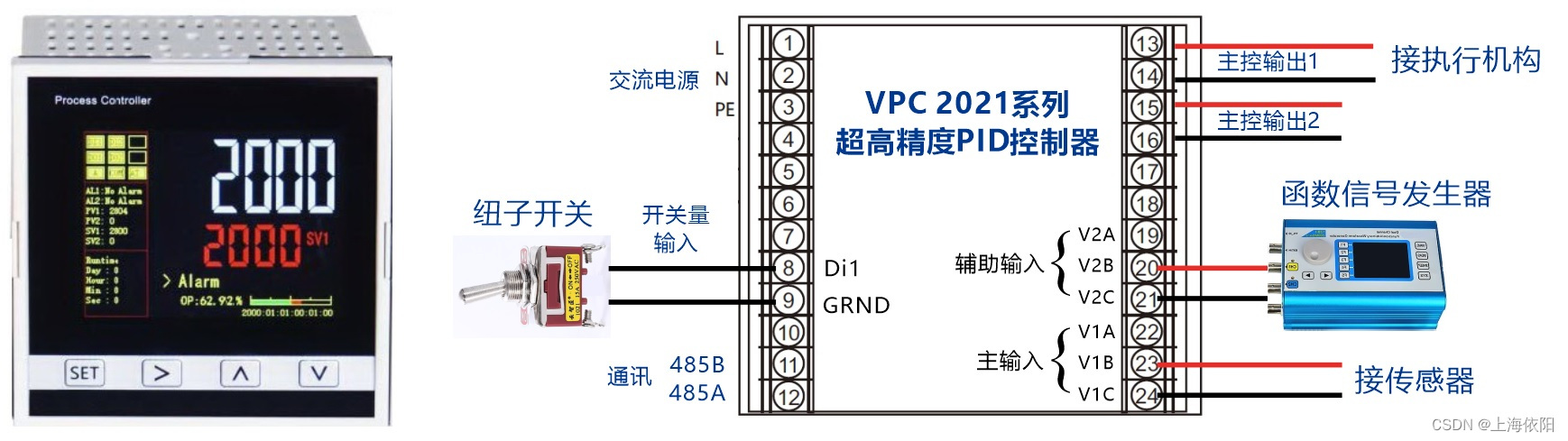
依据上述方案所确定的PID控制装置及其接线如图2所示。
2.1 具有远程设定点功能的PID控制器
所用的具有远程设定值功能的PID控制器一般配置有两个输入通道,第一主输入通道作为测量被控对象的传感器输入,第二辅助输入通道用来作为远程设定点输入。与主输入信号一样,辅助输入的远程设定点同样可接受47种类型的输入信号,其中包括10种热电偶温度传感器、9种电阻型温度传感器、3种纯电阻、10种热敏电阻、3种模拟电流和12种模拟电压,即任何信号源只要能转换为上述47种类型型号,都可以直接接入第二辅助输入通道作为远程设定点源。需要注意的是,远程设定点功能只能在单点设定控制模式下有效,在程序控制模式下无此功能。
2.2 函数信号发生器
对于所有被控对象而言,相应的传感器测量输出无外乎就是电压和电阻这两类信号输出。因此,为了实现被控对象周期性变化的控制,可以采用各种相应的函数信号发生器输出周期性设定值,对于热电偶和热电阻的周期信号输出,可以采用专门的过程校验仪输出相应的温度设定值。
2.3 接线、参数设置和操作
在如图2所示的周期性变量PID控制系统中,在主输入通道上连接过程传感器,在主控输出通道连接的是执行机构,由此传感器、执行机构和PID调节器组成标准的闭环控制回路,在一般情况下可以通过内部设定点进行PID自动控制。
如果要对被控对象进行周期性变化的控制,则使用远程设定点功能,此时需要在辅助输入通道接入远程设定点源,即函数信号发生器或过程校验仪。
完成外部接线后,在运行使用远程设定值功能之前,需要对PID控制器的辅助输入通道相关参数进行设置,需要满足以下几方面要求:
(1) 辅助通道上接入的远程设定点信号类型要与主输入通道完全一致。
(2) 辅助通道的显示上下限也要与主输入通道完全一致。
(3) 显示辅助通道接入的远程设定点信号大小的小数点位数要与主输入通道保持一致。
完成上述辅助输入通道参数的设置后,开始使用远程设定点功能时,还需要激活远程设定值功能。远程设定值功能的激活可以采用以下两种方式:
(1) 内部参数激活方式:在PID控制器中,设置辅助输入通道2的功能为“远程SV”,相应数字为3。
(2)外部开关切换激活:如图2所示可连接一个外部开关进行切换来选择远程设定点功能。同时,还需在PID控制器中,设置辅助输入通道2的功能为 “禁止”,相应数字为0。然后设置外部开关量输入功能DI1为“遥控设定”,相应数字为2。通过这种外部开关量输入功能的设置,就可以采用图2中所示的纽子开关实现远程设定点和本地设定点之间的切换,开关闭合时为远程设定点功能,开关断开时为本地设定点功能。
需要注意的是,无论采用哪种远程设定点激活和切换方式,在输入信号类型、显示上下限范围和小数点位数这三个参数选项上,辅助输入通道始终要与主输入通道保持一致。
3. 总结
综上所述,本文提出的解决方案,可以彻底解决正弦波等周期性变量的PID控制问题,而且使用简便和门槛较低,无需再进行复杂的程序编写。
另外,本解决方案还可以进行多种拓展,如可实现被控对象周期性调制波的加载,非常便于实现更复杂的第二类和第三类边界条件的精密PID控制。