UART简介
串口全称为串行接口,也称为COM接口,串行接口指的是比特一位位顺序传输,通信线路简单。使用两根线就可以实现双向通信,一条为TX,一个为RX。串口通信距离远,但速度相对慢,是一种常用的工业接口。
UART全称为Universal Asynchronous Receiver/Trasmitter,也是异步串行接收器。
USART全称为Universal Synchronous/Asynchronous Receiver/Transmitter,也就是同步/异步串行收发器。相对于UART多了一个同步功能,在硬件上多出一条时钟线。USART可以用作UART。
通讯和通信格式
UART接口与外界通信时,至少用三根线:TXD(发送)、RXD(接收)、GND(地线)。
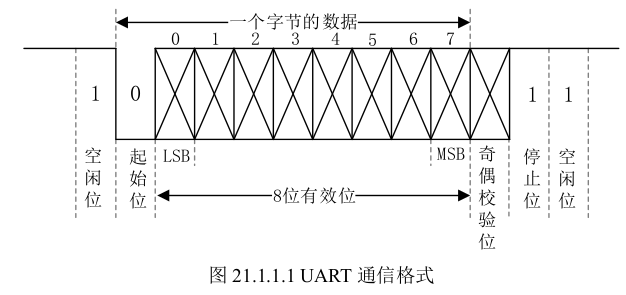
UART通信格式:
| UART位 | 含义 |
|---|---|
| 空闲位 | 数据线在空闲状态的时候,为逻辑1,高电平,没有数据传输。 |
| 起始位 | 当要传输数据时,先传输一个0,也就是将数据线拉低,表示开始传输数据。 |
| 数据位 | 为实际传输的数据,数据位可选5~8位,一般为1个字节8位传输。低位(LSB)先传,高位最后传输。 |
| 奇偶校验位 | 1启动奇偶校验,0不启动 |
| 停止位 | 数据传输完成标志位,停止位的位数可选1或2位,常用1位 |
| 波特率 | 波特率就是UART数据传输的速率,每秒传输的数据位数。 |
介绍
Linux 为上层用户做了一层封装,将这些 ioctl()操作封装成了一套标准的 API,我们就直接使用这一套标准 API 编写自己的串口应用程序。termios 函数描述了一个通用的终端接口,提供了控制异步通讯端口。
termios API
大纲
#include <termiso.h>
#include <unistd.h>
int tcgetattr(int fd,struct termios *termios_p);
int tcsetattr(int fd,int potional_actions,struct termios *termios_p);
int tcsendbreak(int fd,int duration);
int tcdrain(int fd);
int tcflush(int fd, int queue_selector);
int tcflow(int fd, int action);
void cfmakeraw(struct termios *termios_p);
speed_t cfgetispeed(const struct termios *termios_p);
speed_t cfgetospeed(const struct termios *termios_p);
int cfsetispeed(struct termios *termios_p, speed_t speed);
int cfsetospeed(struct termios *termios_p, speed_t speed);
int cfsetspeed(struct termios *termios_p, speed_t speed);
termios 结构体
许多函数描述有一个参数termios_p,是一个指针指向了termios结构体。结构体至少包括了以下成员。
tcflag_t c_iflag; //输入模式
tcflag_t c_oflag; //输出模式
tcflag_t c_cflag; //控制模式
tcflag_t c_lflag; //本地模式
cc_t c_cc[NCCS]; //特定字符
这些值被分配到