/ 导读 /
在自动驾驶技术发展如此迅速的今天,很多量产车上已经配备了多种的辅助驾驶功能,例如自适应巡航ACC、紧急制动AEB、车道居中保持LKA等等,很多的车主也都体验到了技术带给驾驶的改变。另一方面,由于现在的自动驾驶技术还处于发展阶段,无法保证自动驾驶车在任何天气条件下和任何道路环境中都可以安全行驶的。因此,要根据该系统的能力来提前设定好ODD,通过限制行驶环境和行驶方法,将有可能发生的事故防范于未然。
什么是运营设计域ODD?
首先,我们需要了解何为ODD设计?运营设计域ODD(Operational Design Domain)一词的原始定义来自SAE J3016中,描述为:
特定驾驶自动化系统或其功能专门设计的运行条件,包括但不限于环境、地理和时间限制,和/或某些交通或道路特征的存在或缺失。
简单来说,ODD就是要定义好在哪些工况下是能够自动驾驶的,脱离了这些工况,自动驾驶就不能保证工作。任何一台自动驾驶车辆,都必须有一定限定的工况。而这个工况可以很宽泛,也可以很精准,并决定了自动驾驶车辆能胜任什么样的场景。比如,一台车的自动驾驶系统只能在高速上使用,它可以自动保持车道、自动超车、自动跟车、自动让行、自动通过ETC、自动上下匝道等,但到了城市里就无法完全自动驾驶。同时,要确保自动驾驶测试和验证是完整的,至少需要确保ODD所有方面已经通过确保系统安全运行,或通过确保系统能够识别超出ODD 的范围。

因此,自动驾驶系统在启动时需要判断当前所处的环境,如是否黑夜,天气状况等等,从而判断能否启动该自动驾驶功能。在运行时需要识别是否超出该ODD,从而判断该自动驾驶系统能否安全运行。同时,在定义自动驾驶系统的设计运行条件时,需要明确自动驾驶系统能够安全启动和运行的外部环境条件。
ODD的分类框架
那么,如何对自动驾驶领域的ODD进行设计与分类呢?这方面,NHTSA给出了很好的分类标准,在《A Framework for Automated Driving System Testable Cases and Scenarios》中采用六大要素构建设计运行域,分为基础设施Physical Infrastructure、驾驶操作限制Operational Constraints、周边物体Objects、互联Connectivity、环境条件Environmental Conditions和区域Zones。

通过对于这六大要素的划分,可以较为清晰地定义出自动驾驶系统可以运行的工况及范围。
在国内,由中国智能网联汽车产业创新联盟预期功能安全工作组发起,清华大学与国汽(北京)智能网联汽车研究院有限公司牵头编制的《智能网联汽车预期功能安全场景库建设报告》,也为自动驾驶ODD的设计提供了很好的参考。
其中,对智能驾驶现有感知技术、定位技术、决策方法、控制方法、人机交互、通信技术等进行了调研与局限性分析,得出对应的智能驾驶预期功能安全测试需求;并基于以上测试需求,设计了面向智能驾驶预期功能安全测试的“7层架构”格式的虚拟场景框架。
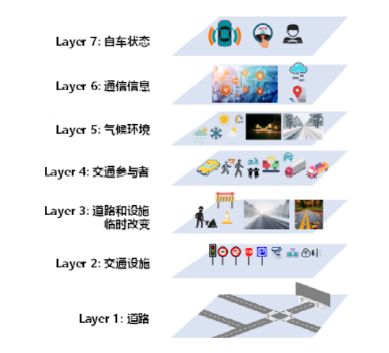
在该框架中,综合考虑了现有智能驾驶系统设备功能局限、算法缺陷以及人员误用等问题,并参考Pegasus项目,覆盖了传统智能网联汽车道路、交通设施、道路和设施临时改变、交通参与者、气候环境、通信信息这六层结构,为适应预期功能安全场景测试需求,在已有基础上增加了智慧交通设备,如路侧传感器、路侧通信设备、路侧信息处理单元等元素,更加清晰定义了场景分类时的参考标准。
ODD的边界如何测试?
既然ODD的划分标准与框架都有相关的标准可以清晰定义,那么在对ODD场景进行分类之后,如何去测试这些ODD的边界来判断现有的自动驾驶系统是否合格达标呢?
我们知道,自动驾驶汽车的开发满足V字开发模型,在V字开发模型中,涉及的测试方法主要包括软件在环(SIL,即software-in-loop)、硬件在环(HIL,即hardware-in-loop)、车辆在环(VIL,即vehicle-in-loop),再到最后的整车场地、道路测试等方法,涵盖了从零部件到系统再到整车的全链条验证。在测试内容方面,主要包括传感器、执行器、算法、人机界面测试以及整车功能等内容。
首先是在环测试,借助虚拟现实数据生成、传输与交互技术,模拟自动驾驶汽车在真实道路环境行驶,并通过概率分布的危险场景强化模拟方法,进行的自适应加速测试。通过在环测试,可以在大幅节约测试时间和成本的同时,给虚拟测试提供了验证结果,并为实际道路测试提供了较为真实的参考数据。

其次是场地测试,结合工业和信息化部、公安部、交通运输部等三部委共同发布的《智能网联汽车道路测试管理规范(试行)》,“考试项目”设置可以包含以下几个方面:一是基本交通管理设施检测与响应能力测试;二是前方车道内动静态目标(机动车、非机动车、行人、障碍物等)识别与响应能力测试;三是遵守规则行车能力测试,测试内容应包含超车、并道、通过交叉口等内容;四是安全接管与应急制动能力测试,测试内容应包含靠边停车与起步、应急车道内停车、人工接管等内容;五是综合能力测试,综合考察自动驾驶汽车对交通语言认知能力、安全文明驾驶能力、复杂环境通行能力、多参与对象协同行驶能力、网联通讯能力等内容。
通过合理设计及严格执行的测试流程,才能保证自动驾驶ODD的边界准确性,为自动驾驶在实际使用的过程中安全做出保障。
总结
总的来说,ODD的场景分类给予非L5级别的自动驾驶非常明确的场景定义以及测试标准,可以极大程度上保障驾驶员在使用这些自动驾驶功能时的安全性,而根据不同场景的业务需求进行合理地ODD设计以及测试已经成为了所有自动驾驶企业们着重关注的目标。在未来,随着自动驾驶技术的不断普及以及量产,对于安全性的关注将越来越高,保障自动驾驶功能在ODD范围内的稳定运行成为了所有车企们的共同研究课题。
- End -








![【GO】k8s 管理系统项目23[前端部分–工作负载-Pod]](https://img-blog.csdnimg.cn/8a1fccb8065646748cc05b1da1b4ff04.png)