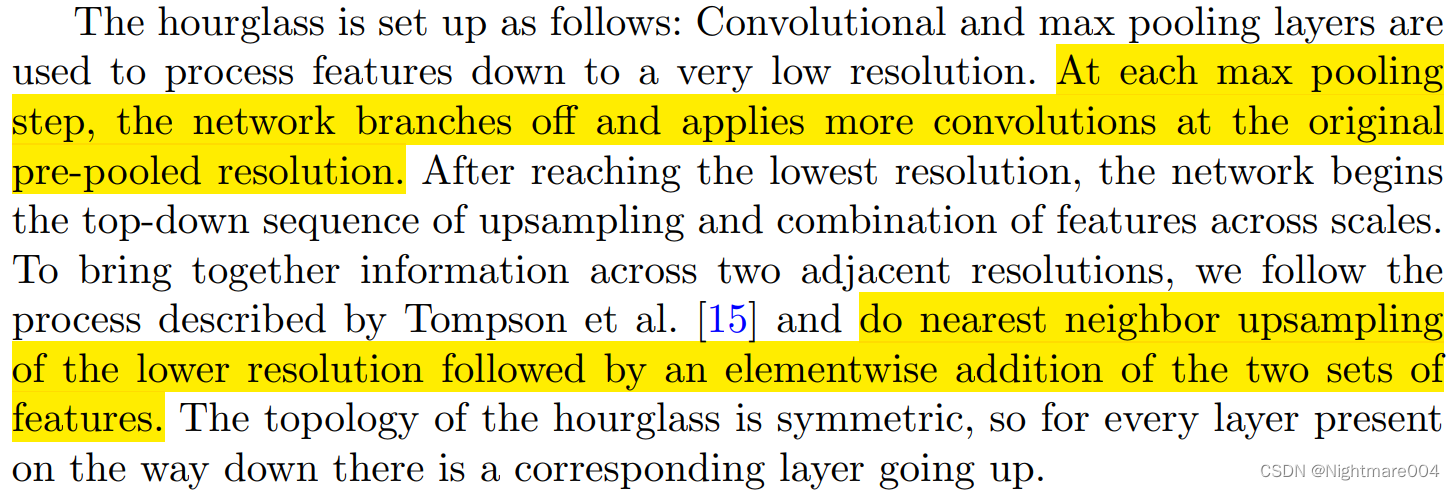
Stacked hourglass networks for human pose estimation
https://github.com/princeton-vl/pytorch_stacked_hourglass
这是一个用于人体姿态估计的模型,只能检测单个人
作者通过重复的bottom-up(高分辨率->低分辨率)和top-down(低分辨率->高分辨率)以及中间监督(深监督)来提升模型的性能
模型
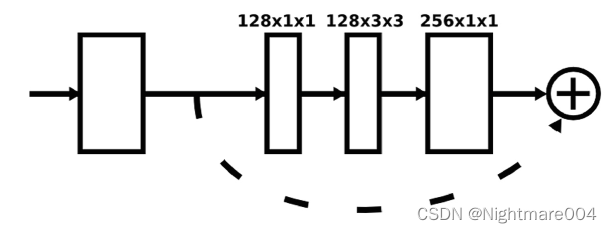
残差
模型里的残差都是不改变分辨率的
class Conv(nn.Module):
def __init__(self, inp_dim, out_dim, kernel_size=3, stride=1, bn=False, relu=True):
super(Conv, self).__init__()
self.inp_dim = inp_dim
self.conv = nn.Conv2d(inp_dim, out_dim, kernel_size, stride, padding=(kernel_size - 1) // 2, bias=True)
self.relu = None
self.bn = None
if relu:
self.relu = nn.ReLU()
if bn:
self.bn = nn.BatchNorm2d(out_dim)
def forward(self, x):
assert x.size()[1] == self.inp_dim, "{} {}".format(x.size()[1], self.inp_dim)
x = self.conv(x)
if self.bn is not None:
x = self.bn(x)
if self.relu is not None:
x = self.relu(x)
return x
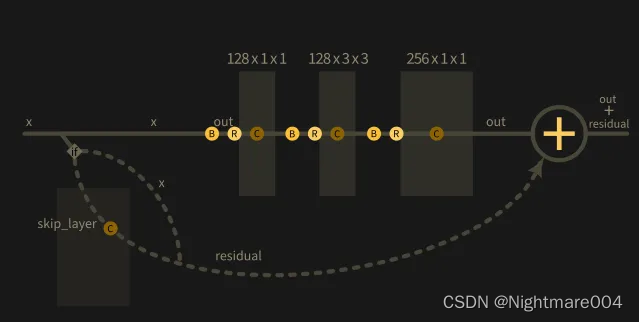
class Residual(nn.Module):
def __init__(self, inp_dim, out_dim):
super(Residual, self).__init__()
self.relu = nn.ReLU()
self.bn1 = nn.BatchNorm2d(inp_dim)
self.conv1 = Conv(inp_dim, out_dim // 2, 1, relu=False)
self.bn2 = nn.BatchNorm2d(out_dim // 2)
self.conv2 = Conv(out_dim // 2, out_dim // 2, 3, relu=False)
self.bn3 = nn.BatchNorm2d(out_dim // 2)
self.conv3 = Conv(out_dim // 2, out_dim, 1, relu=False)
self.skip_layer = Conv(inp_dim, out_dim, 1, relu=False)
if inp_dim == out_dim:
self.need_skip = False
else:
self.need_skip = True
def forward(self, x): # ([1, inp_dim, H, W])
if self.need_skip:
residual = self.skip_layer(x) # ([1, out_dim, H, W])
else:
residual = x # ([1, out_dim, H, W])
out = self.bn1(x)
out = self.relu(out)
out = self.conv1(out) # ([1, out_dim / 2, H, W])
out = self.bn2(out)
out = self.relu(out)
out = self.conv2(out) # ([1, out_dim / 2, H, W])
out = self.bn3(out)
out = self.relu(out)
out = self.conv3(out) # ([1, out_dim, H, W])
out += residual # ([1, out_dim, H, W])
return out # ([1, out_dim, H, W])
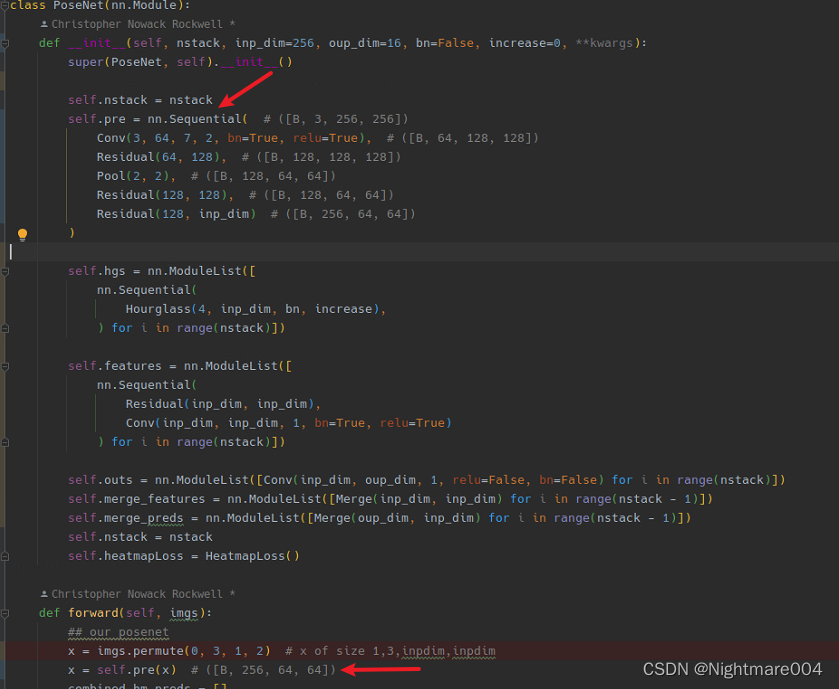
最前面
首先模型使用了一个卷积核为
7
∗
7
7*7
7∗7步长为2的卷积,然后使用了一个残差和下采样,将图像从
256
∗
256
256*256
256∗256降到了
64
∗
64
64*64
64∗64
接着接了两个残差
对应论文这一段

self.pre = nn.Sequential( # ([B, 3, 256, 256])
Conv(3, 64, 7, 2, bn=True, relu=True), # ([B, 64, 128, 128])
Residual(64, 128), # ([B, 128, 128, 128])
Pool(2, 2), # ([B, 128, 64, 64])
Residual(128, 128), # ([B, 128, 64, 64])
Residual(128, inp_dim) # ([B, 256, 64, 64])
)
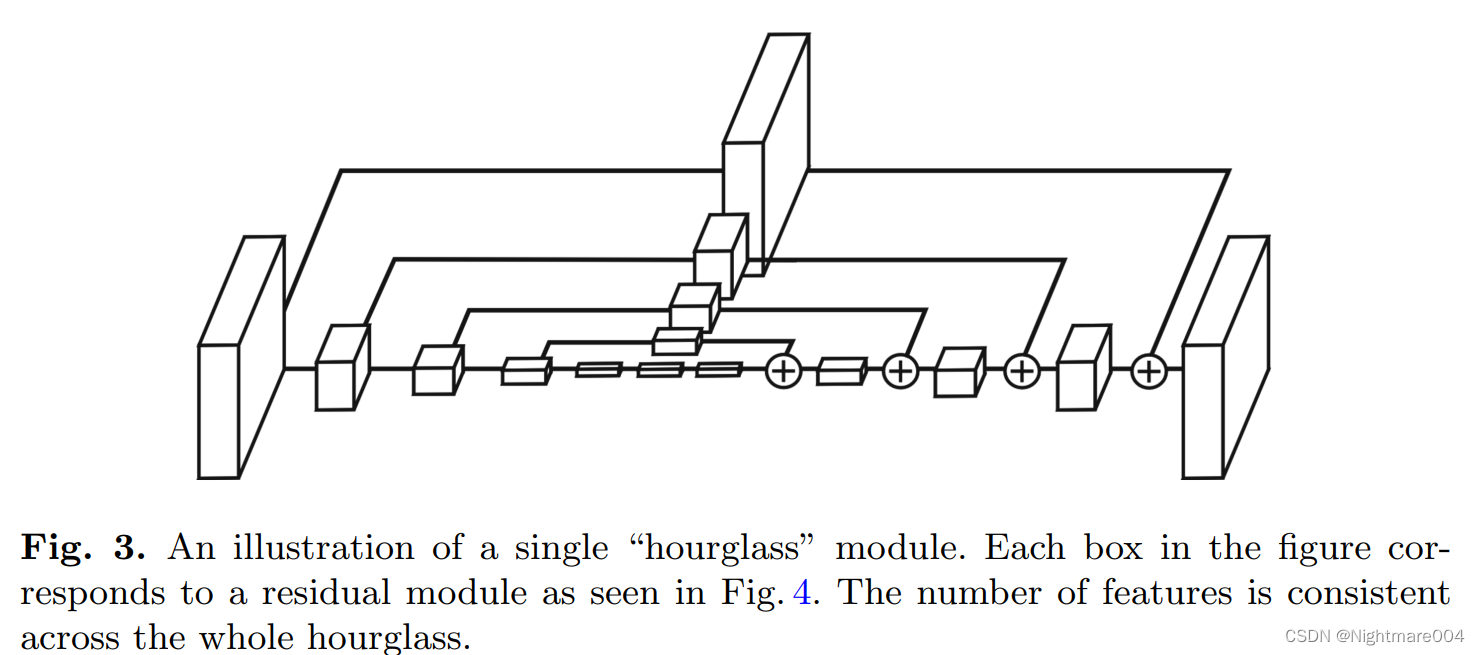
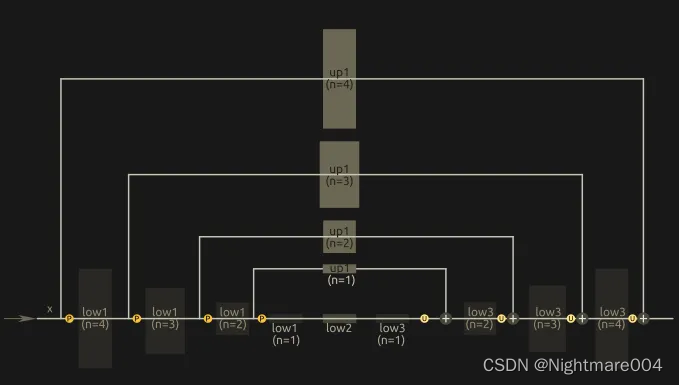
单个Hourglass
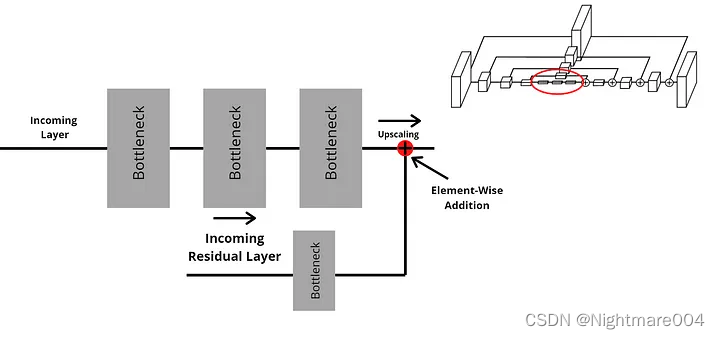
在每一次最大池化之前,模型会产生一个分支,一条最大池化,另一条会接卷积(残差)
合并之前,走最大池化的的分支会做一次上采样,然后两个分支按元素加
(对应论文这两句)
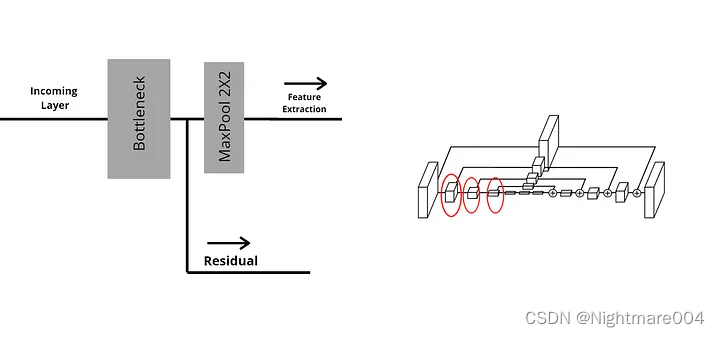
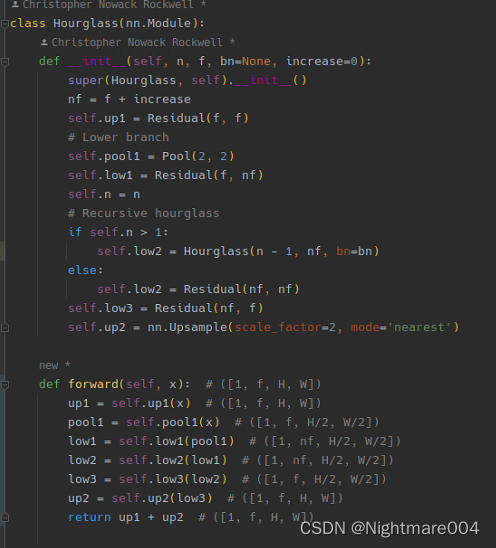
代码对应这个图
(然而论文的图里最前面的残差不知道怎么算。。。)
class Hourglass(nn.Module):
def __init__(self, n, f, bn=None, increase=0):
super(Hourglass, self).__init__()
nf = f + increase
self.up1 = Residual(f, f)
# Lower branch
self.pool1 = Pool(2, 2)
self.low1 = Residual(f, nf)
self.n = n
# Recursive hourglass
if self.n > 1:
self.low2 = Hourglass(n - 1, nf, bn=bn)
else:
self.low2 = Residual(nf, nf)
self.low3 = Residual(nf, f)
self.up2 = nn.Upsample(scale_factor=2, mode='nearest')
def forward(self, x): # ([1, f, H, W])
up1 = self.up1(x) # ([1, f, H, W])
pool1 = self.pool1(x) # ([1, f, H/2, W/2])
low1 = self.low1(pool1) # ([1, nf, H/2, W/2])
low2 = self.low2(low1) # ([1, nf, H/2, W/2])
low3 = self.low3(low2) # ([1, f, H/2, W/2])
up2 = self.up2(low3) # ([1, f, H, W])
return up1 + up2 # ([1, f, H, W])
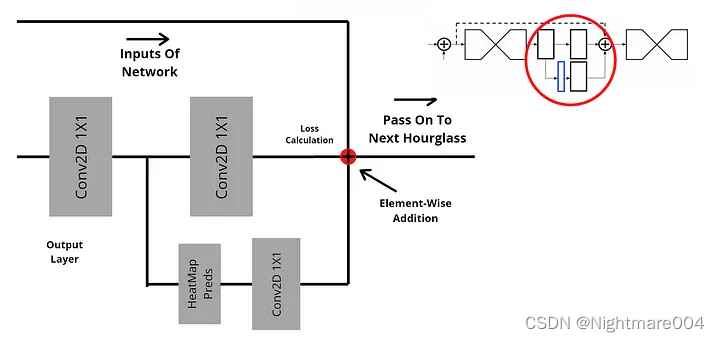
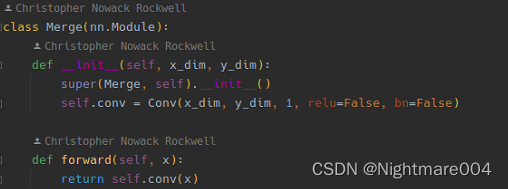
热力图
模型会接两个
1
∗
1
1*1
1∗1的卷积来产生热力图(heatmap)

(虽然不知道为啥代码里还有一个残差)
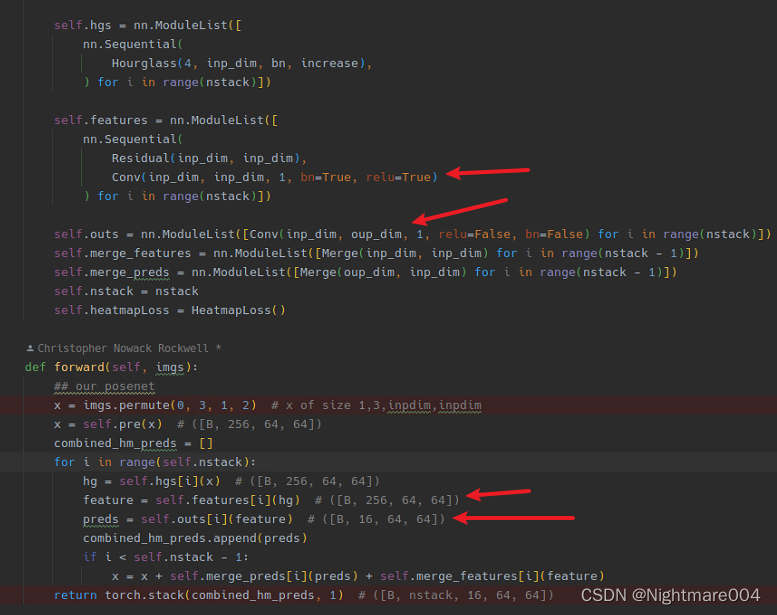
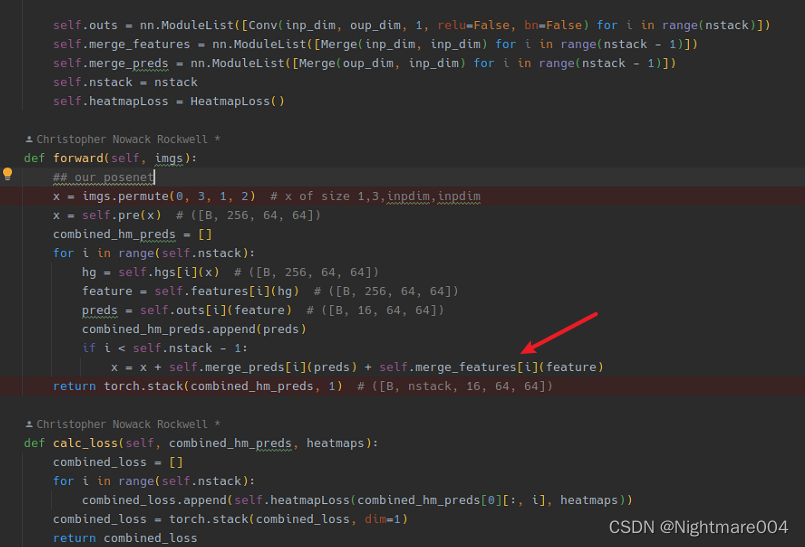
中间监督
将前一个Hourglass,heatmap,heatmap之前的特征通过2个
1
∗
1
1*1
1∗1的卷积加在一起

https://towardsdatascience.com/using-hourglass-networks-to-understand-human-poses-1e40e349fa15#:~:text=Hourglass%20networks%20are%20a%20type,image%20into%20a%20feature%20matrix.
https://medium.com/@monadsblog/stacked-hourglass-networks-14bee8c35678





![②【Java 组】蓝桥杯省赛真题解析 [振兴中华] [三部排序] 持续更新中...](https://img-blog.csdnimg.cn/20a7f1b58dfb4660b75d7f021c157d57.png#pic_center)