ubuntu安装spinningup
经过这篇博客安装好mujoco和mujoco-py后,下面安装强化学习代码库spinningup
按照spinningup官网的安装步骤走,下面我总结一下安装过程中出现的问题
- 在安装spinningup的时候,最好重建一个新的虚拟环境,因为它有些包安装的版本比较老
- 在官网教程中运行下面命令时会报错
pip install gym[mujoco,robotics]
报错内容:
...
You appear to be missing MuJoCo. We expected to find the file here: /home/zf/.mujoco/mjpro150
This package only provides python bindings, the library must be installed separately.
Please follow the instructions on the README to install MuJoCo
https://github.com/openai/mujoco-py#install-mujoco
Which can be downloaded from the website
https://www.roboti.us/index.html
...
这是因为gym目前只支持mujoco1.5,原因是2.0及以后的版本还没完成测试,出过问题。
解决办法:需要排除mujoco_py依赖,直接用pip 安装
pip install gym[all] --no-deps mujoco_py
或者另一种方法,详情看这篇博客
- 跑下面这个demo查看训练视频时报错
python -m spinup.run ppo --hid "[32,32]" --env Walker2d-v2 --exp_name mujocotest
报错信息:
Creating window glfw
ERROR: GLEW initalization error: Missing GL version
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kSyYzA32-1677398662636)(null)]](https://img-blog.csdnimg.cn/16f3a3759a374a24b0dc08c3aa05bbf2.png)
解决办法:
配置bashrc
gedit ~/.bashrc
在文档最后一行加入下面代码然后保存退出文档
export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so

然后运行下面代码source一下bashrc文件:
source ~/.bashrc
然后就可以查看训练视频了
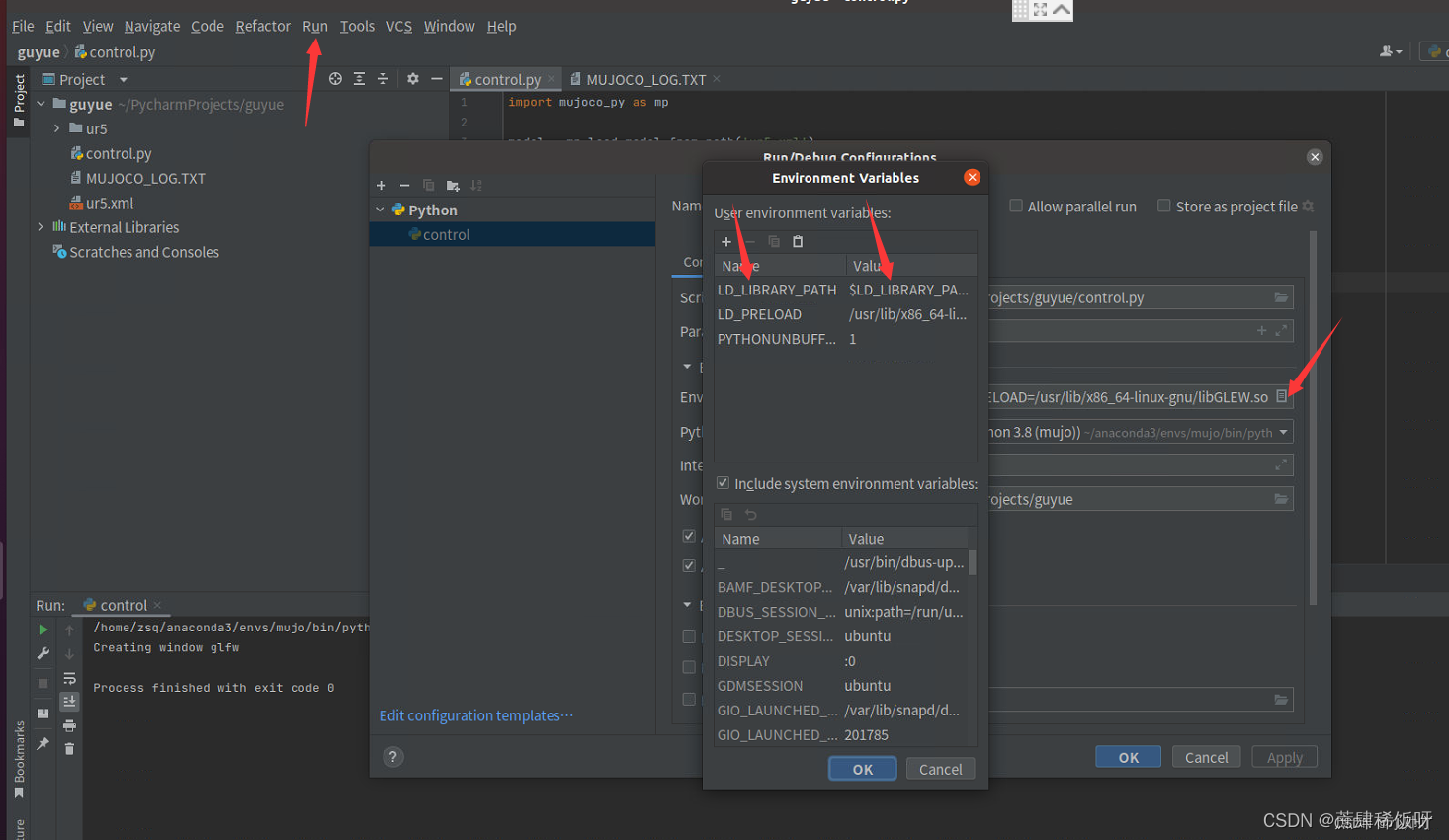
如果在pycharm中运行查看训练视频,还需要配置变量
点击 pycharm中的 Run->Edit Configurations->Environment variables 然后添加变量Name是LD_PRELOAD,对应的Value是/usr/lib/x86_64-linux-gnu/libGLEW.so,保存退出之后重新运行代码。
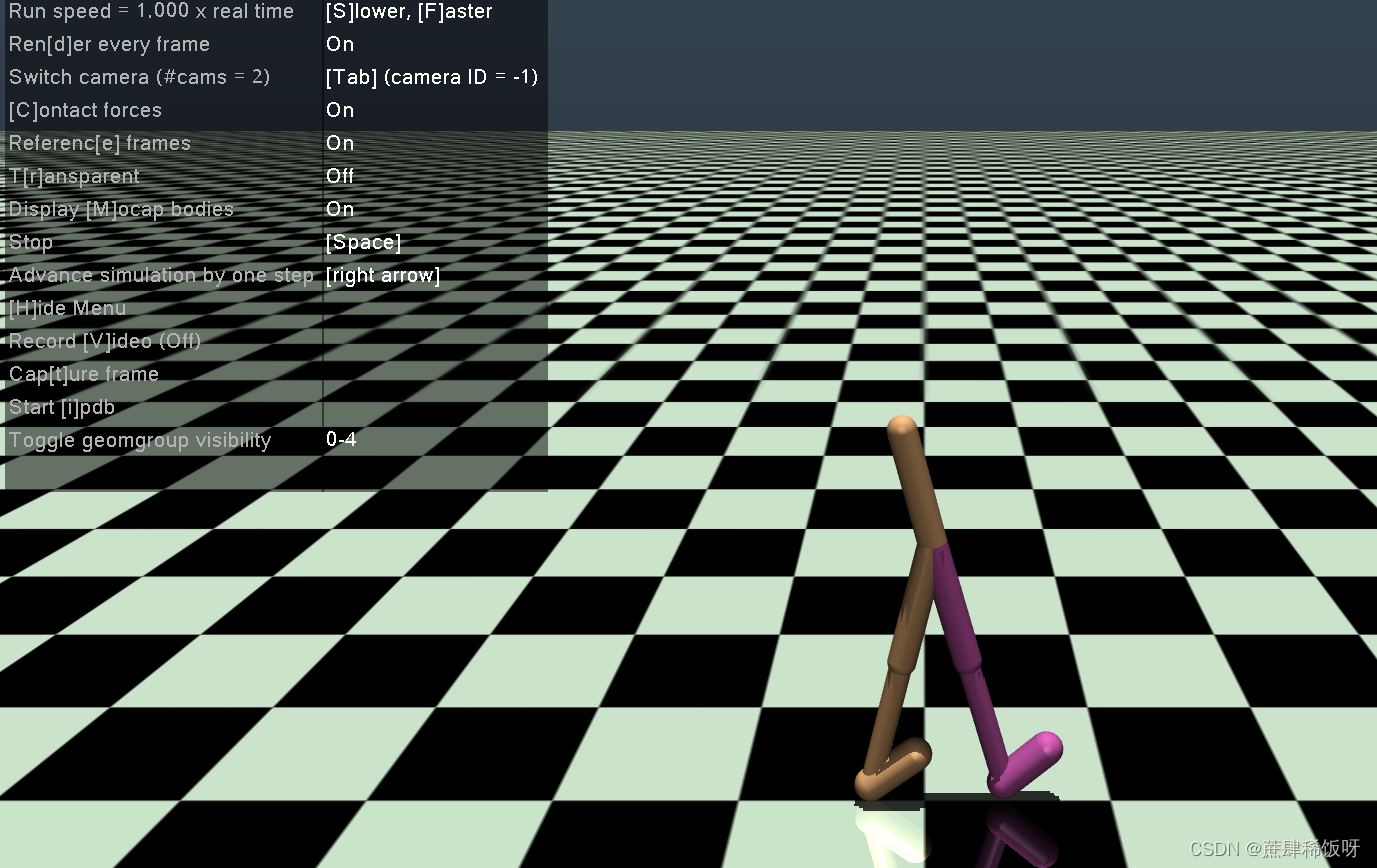
可以看到如下图,出现了正常的仿真画面。
参考链接
![[数据结构]:05-循环队列(链表)(C语言实现)](https://img-blog.csdnimg.cn/a63177dcd6974290a3eaa455362d19a4.png)






![[音视频] BMP 图片格式分析](https://img-blog.csdnimg.cn/a7a8747c7142445f91c4127bf032c1e8.png)