电子技术——频率补偿

在本节我们介绍修改三极点或多极点放大器的开环增益函数 A ( s ) A(s) A(s) 的方法,使得闭环增益在我们希望的值上放大器是稳定的。这个过程称为频率补偿。
理论
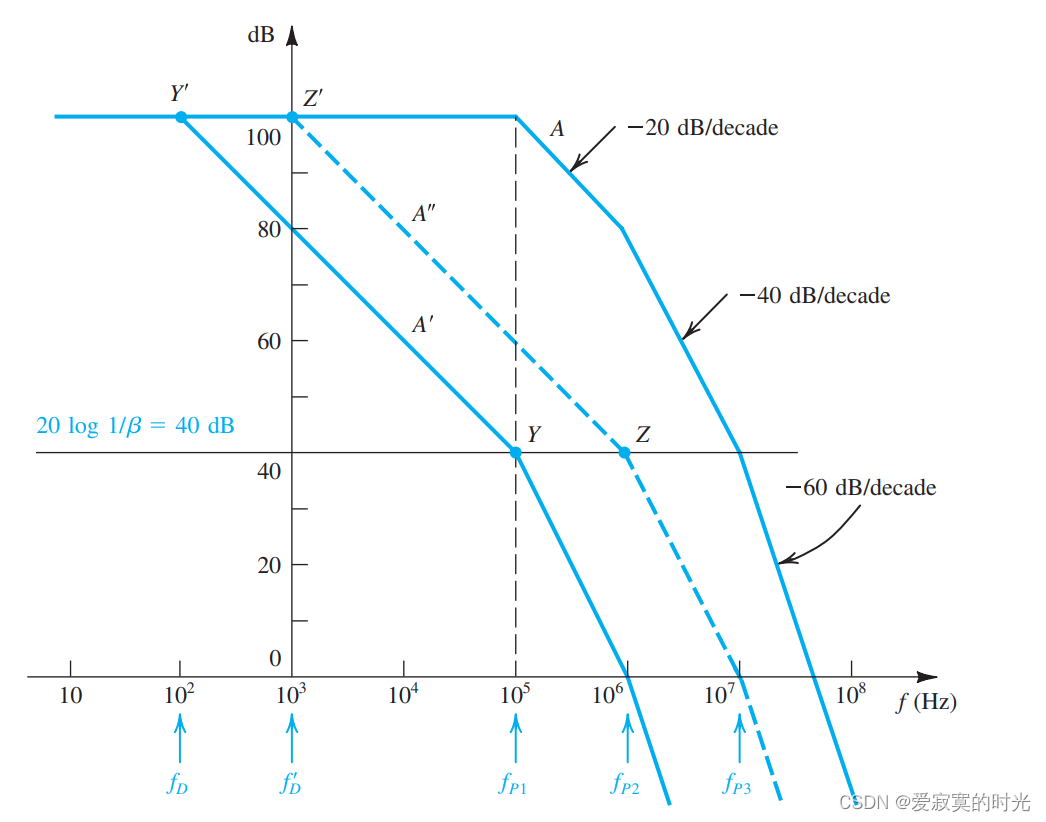
最简单的频率补偿方法是引入新的极点,如图下面是一个放大器的伯德图:
首先我们画出我们期望的
β
\beta
β 线,即
20
log
1
/
β
=
40
d
B
20 \log 1/\beta = 40dB
20log1/β=40dB 直线。我们发现该直线并不与
−
20
d
B
/
d
e
c
a
d
e
-20dB/decade
−20dB/decade 区域相交,因此此时的放大器是不稳定的。我们在第一个极点
f
P
1
f_{P1}
fP1 与直线的交点
Y
Y
Y 点往上使用
−
20
d
B
/
d
e
c
a
d
e
-20dB/decade
−20dB/decade 线延长至
A
0
A_0
A0 的交点
Y
′
Y'
Y′ 此时的
Y
′
Y'
Y′ 点就是我们新引入的极点,对应的频率为
f
D
f_D
fD ,新的开环增益函数记为
A
′
(
s
)
A'(s)
A′(s) 。
针对于函数 A ′ ( s ) A'(s) A′(s) 有四个极点 f D , f P 1 , f P 2 , f P 3 f_D,f_{P1},f_{P2},f_{P3} fD,fP1,fP2,fP3 。此时 20 log 1 / β = 40 d B 20 \log 1/\beta = 40dB 20log1/β=40dB 直线与 − 20 d B / d e c a d e -20dB/decade −20dB/decade 区域相交,放大器是稳定的。
这个方法一个严重的缺点是降低了放大器的带宽,这意味着在放大器的高频处其反馈量会急剧下降。因为放大器的品质依赖于反馈量的大小,在高频处反馈质量就会下降。
一种改进的方法是,想办法去掉极点 f P 1 f_{P1} fP1 ,此时极点从 f P 2 f_{P2} fP2 开始,补偿后对应曲线 A ′ ′ A'' A′′ 。我们发现补偿频率点 f D f_D fD 前移到 f D ′ f'_D fD′ ,带宽得到增加。
尽管没有办法去掉极点 f P 1 f_{P1} fP1 ,但是我们可以让极点 f P 1 f_{P1} fP1 向左移动到 f D ′ f'_D fD′ 处来达到我们的目的。
实现
一般的放大器电路由多阶增益放大器组成,每一阶都会贡献一些极点。通过手动或者计算机分析电路,可以确定极点 f P 1 f_{P1} fP1 和 f P 2 f_{P2} fP2 以及其他极点由哪一阶放大器决定。为了方便说明,我们假设第一个极点 f P 1 f_{P1} fP1 是由于下图中两个差分放大器之间引入的:
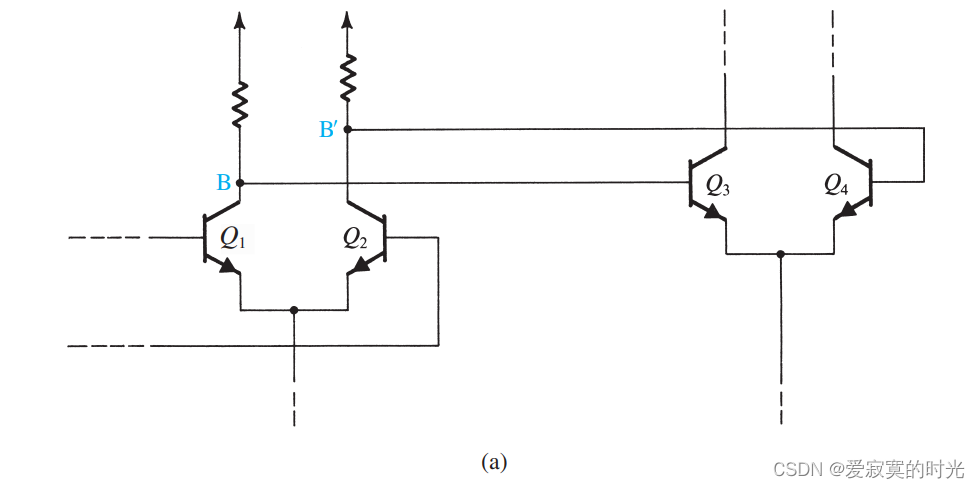
下图展示了等效的传输模型(b):
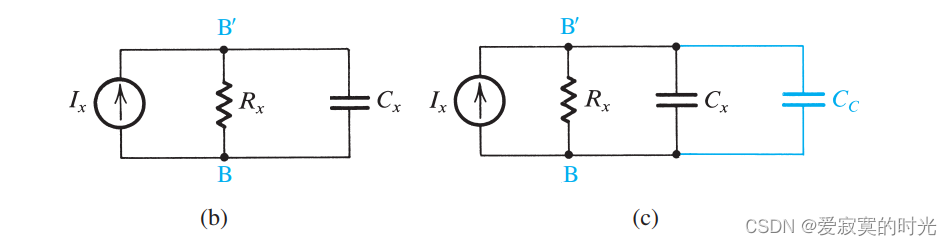
在图中,
I
x
I_x
Ix 是初级差分放大器的输出信号电流,
R
x
R_x
Rx 和
C
x
C_x
Cx 是从端口
B
B
′
BB'
BB′ 看过去的容抗和阻抗,此时极点为:
f P 1 = 1 2 π C x R x f_{P1} = \frac{1}{2 \pi C_x R_x} fP1=2πCxRx1
现在让我们在 B B ′ BB' BB′ 之间引入电容 C c C_c Cc ,如图©此时的极点变成为:
f P 1 = 1 2 π ( C x + C c ) R x f_{P1} = \frac{1}{2 \pi (C_x +C_c) R_x} fP1=2π(Cx+Cc)Rx1
我们可以选择合适的 C c C_c Cc 使得 f P 1 = f D ′ f_{P1} = f'_D fP1=fD′ 。
需要注意的是增加电阻 C c C_c Cc 可能会影响其他极点的位置,有可能需要计算新的极点位置,继续迭代我们的调整过程,直至达到我们的目的。
这个方法的缺点是 C c C_c Cc 的值可能很大。因此对于IC类的放大器是不利的,一个更加完美的方法是使用米勒效应进行频率补偿。
米勒补偿和极点分割
下图展示了多阶放大器的其中一阶:
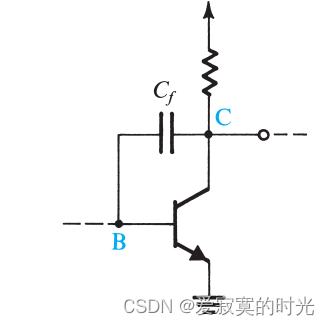
为了方便说明,我们假设此阶放大器为CE放大器,在反馈线路上我们引入
C
f
C_f
Cf 。下图展示一个等效的电路模型:
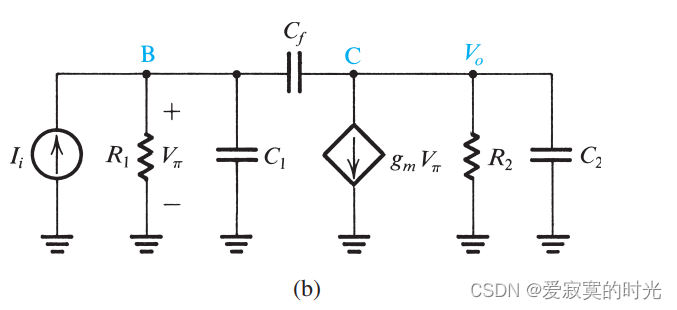
上图中
I
i
I_i
Ii 是从B点输入的信号电流,
R
1
R_1
R1 和
C
1
C_1
C1 是从B点对地的总阻抗和总容抗,
R
2
R_2
R2 和
C
2
C_2
C2 是从C点对地的总阻抗和总容抗。若没有
C
f
C_f
Cf 则存在两个输入输出极点:
f P 1 = 1 2 π C 1 R 1 f_{P1} = \frac{1}{2 \pi C_1R_1} fP1=2πC1R11
f P 2 = 1 2 π C 2 R 2 f_{P2} = \frac{1}{2 \pi C_2R_2} fP2=2πC2R21
考虑当 C f C_f Cf 存在的时候,我们可以使用米勒等效进行分析,最终我们得到其电路的两个新极点:
f P 1 ′ = 1 2 π g m C f R 1 R 2 f'_{P1} = \frac{1}{2 \pi g_mC_fR_1R_2} fP1′=2πgmCfR1R21
f P 2 ′ = g m C f 2 π C 1 C 2 + C f ( C 1 + C 2 ) f'_{P2} = \frac{g_mC_f}{2 \pi C_1C_2 + C_f(C_1 + C_2)} fP2′=2πC1C2+Cf(C1+C2)gmCf
我们发现,随着 C f C_f Cf 的增加, f P 1 ′ f'_{P1} fP1′ 将会减小,而 f P 2 ′ f'_{P2} fP2′ 则会增大,这意味着两个极点会逐渐分开,这个现象称为 极点分割 。注意 f P 2 ′ f'_{P2} fP2′ 的增大对于我们来说是有益的,因为他拓宽了 − 20 d B / d e c a d e -20dB/decade −20dB/decade 区域。最终,因为受到米勒效应的影响, C f C_f Cf 对极点的影响变成了 g m C f g_mC_f gmCf 因此极小的电容就可以实现我们的目标。