KUKA机器人外部自动运行模式的相关信号配置

| 通过例如PLC这样的控制器来进行外部自动运行控制时,运行接口向机器人控制系统发出机器人进程的相关信号(例如运行许可、故障确认、程序启动等),机器人向上级控制系统发送有关运行状态和故障状态的信息。 |
必需的配置:
配置CELL.SRC程序
配置外部自动运行接口的输入/输出端
如下图所示,为外部自动运行接口最主要的输入/输出信号
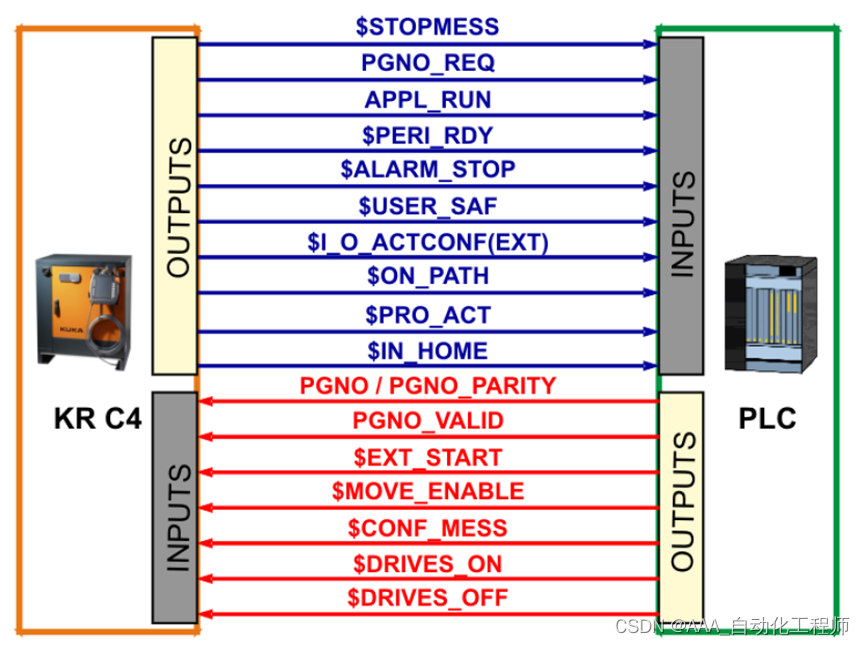
对于机器人而言:
主要的输入信号有:
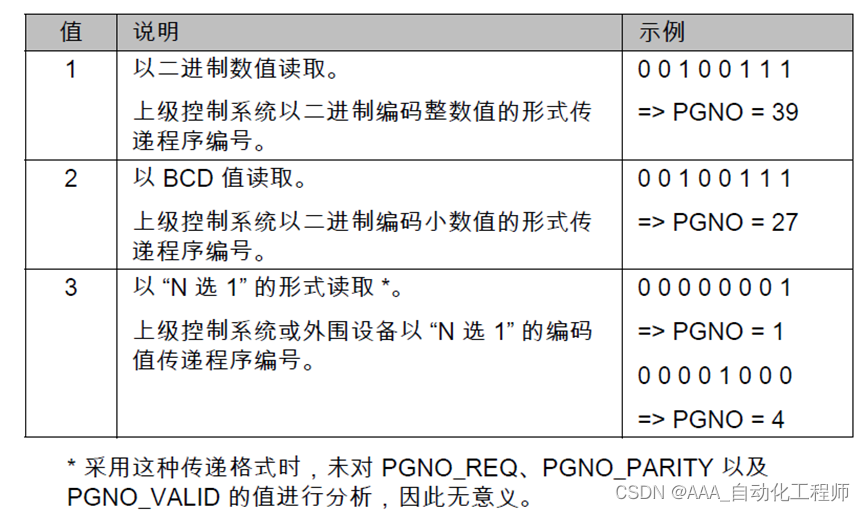
- PGNO_TYPE 程序号类型
此变量确定了以何种格式来读取上级控制器传送过来的程序编号
- PGNO_LENGTH 程序号长度
此变量确定了上级控制器传送过来的程序编号的位宽,值的范围:1~16
若PNGO_TYPE的值为2,则只允许位宽为4、8、12和16 - PGNO_PARITY 程序号的奇偶位
上级控制器传送过来的奇偶校验位(0无校验、负值奇校验、正值偶校验)<