文章目录
- 1、轨迹规划基础
- 2、Frenet坐标系
- 3、路径规划和速度规划
- 4、轨迹优化(QP过程)
- 5、规划流程(lane follow场景为例)
- 1、规划模块流程
- 2、Apollo中各场景
- 3、Lane_follow场景中task
本文以具体场景Lane follow为例梳理具体的轨迹规划算法流程。详细介绍轨迹规划重要基础:Frenet坐标系列、路径规划速度规划、轨迹平滑算法原理。
1、轨迹规划基础
对于规划问题,本质上就是在(x,y,t)这个三维空间内搜索出一条可行的序列,能够满足舒适性及安全性。Apollo中是将三维空间坐标转换到Frenet坐标系中,即规划问题解耦合成路径规划(SL)和速度规划(ST)两个一维的优化问题,对其分别进行求解。
两者思路都是先将障碍物映射到S-L/S-T二维空间,先用动态规划等方法搜索可行使的凸空间,再用二次规划或者非线性优化方法进行优化。最后将速度曲线和路径轨迹进行融合得到每一时刻的轨迹点,输入到控制模块中。
2、Frenet坐标系
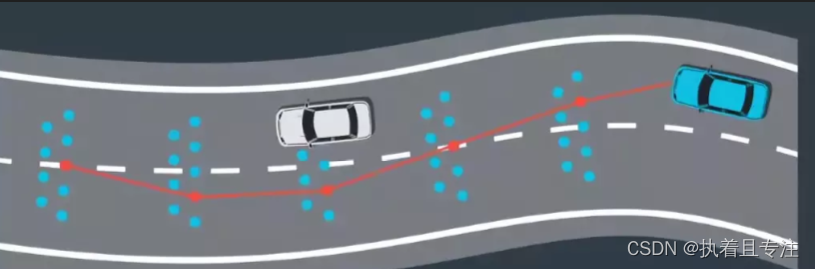
给定一条平滑的参考线s(一般为道路中心线),车辆在地图框架中的运动被解耦为两个独立的一维运动,即在Frenet框架中沿引导线的纵向运动s和与引导线正交的横向运动l。
对于道路的每个点上,横轴和纵轴都是垂直的,纵坐标表示在道路中的行驶距离,横坐标表示汽车偏离中心线的距离。
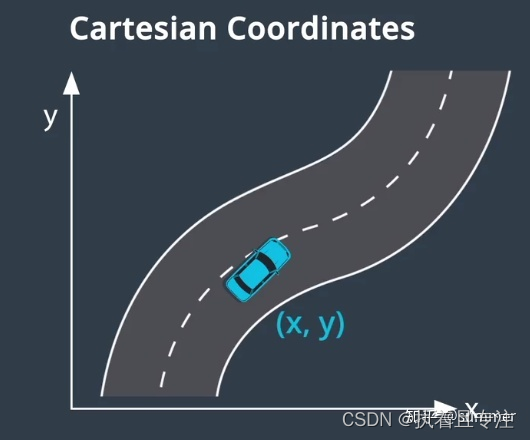
为什么要用Frenet坐标系?
笛卡尔坐标系描述世界坐标系下坐标(x,y),难以利用道路结构(不知道路在哪,车辆行驶距离、是否偏离中心线等)。大部分的道路并不是笔直的,而是具有一定弯曲度的弧线。
Frenet坐标系下,车辆只需知道所在车道位置以及与周边障碍物的横纵向距离。将优化问题(x,y,t)解耦成两个一维优化问题(SL图进行路径规划和ST图进行速度规划)。
笛卡尔坐标系和Frenet坐标系的转换过程?
详细推到公式
Apollo坐标系研究
3、路径规划和速度规划
Apollo中轨迹规划解耦为路径规划(处理静态环境:道路、静止或低速障碍物))与速度规划(处理动态环境:高速障碍物)。两部分。每个规划过程分为决策与优化(DP+QP过程)。
(1)路径规划:
路段分割成若干单元格,对每个单元格随机采样产生候选路径,重复生成多个候选路径。设置合理的cost函数(偏离车道中心距离、障碍物距离、速度和曲率变化程度等)来选择cost最小的路径。
目标是找到S(l)函数(为什么不是l(s):横向运动是由纵向运动引起的)。
(2)速度规划:
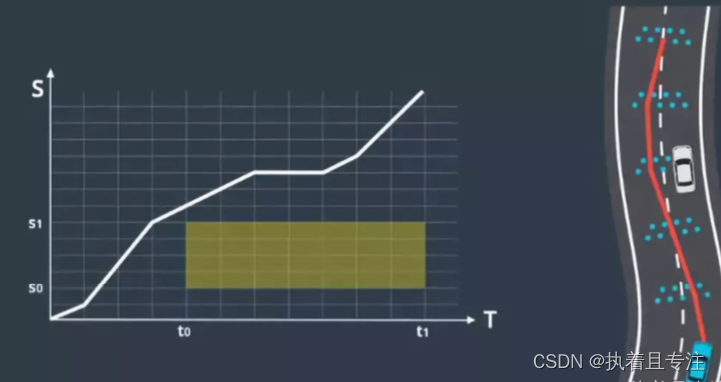
在ST图上进行,对路程和时间进行采样,将st图离散多个单元格,更具预测和一些路径规划的信息和障碍物的决策等,将障碍物、限速等投影在ST图上。利利用全局搜索方法DP算法得到决策,在利用优化方法(二次规划和非线性规划)进行速度规划。
st图上斜率越大,速度越大。
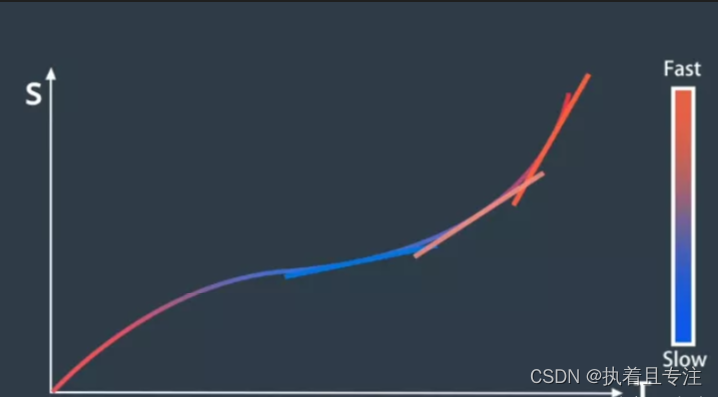
采样: 速度规划在ST图进行采样,在t tt的方向上以固定的间隔进行采样,在s ss方向上以先密后疏的方式进行采样(离主车越近,所需规划的精度就需更高;离主车越远,牺牲采样精度,提升采样效率)
设计状态转移方程:
主要考虑不能与障碍物发生碰撞:障碍物安全距离之内,则cost设为无穷;如果在安全距离之外,则cost设为0;如果在安全距离与障碍物之间,则按按之间的距离计算。
4、轨迹优化(QP过程)
主要采用二次规划算法实现轨迹的平滑和拟合,平滑后的路径曲线和速度曲线进行融合生成三维度轨迹点。二次规划标准形式:
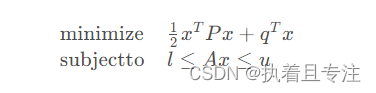
x是要优化的变量,是n维的向量。p是二次项系数,是正定矩阵。q是一次项系数,是n维向量。A是一个mxn的矩阵,A为约束函数的一次项系数,m为约束函数的个数。l和u分别为约束函数的下边界和上边界。Apollo中使用OSQP库对二次规划进行求解。
(1)路径规划优化: 优化变量 x为横向距离和其一阶、二阶导数:
l
l
l,
l
′
l'
l′,
l
′
′
l''
l′′。目标函数的设计主要考虑:安全、靠近车道中心线、舒适度、尽可能降低加速度、接近终点。约束主要考虑不能与障碍物碰撞、加速度满足车辆运动学限制。目标函数如下:

Apollo中使用OSQP库对二次规划进行求解,具体包括:设定OSQP求解参数、计算QP系数矩阵、构造OSQP求解器、获取优化结果。
详细原理参考:基于二次规划的路径规划。
速度规划优化: 优化变量x为横向距离和其一阶、二阶导数:
s
s
s,
s
′
s'
s′,
s
′
′
s''
s′′。目标函数的设计主要考虑:转弯时减速行驶, 曲率越大,速度越小; 舒适度、尽可能降低加速度; 决策时制定的st曲线; 接近参考速度。约束主要考虑不能与障碍物碰撞、加速度满足车辆运动学限制。目标函数如下:

详细原理参考:Em planer算法解析
5、规划流程(lane follow场景为例)
1、规划模块流程
让我们回顾一下,规划模块运行流程如下:
入口函数PlanningComponent::Proc() -> 主要逻辑函数OnLanePlanning::RunOnce() ->
选择规划模式OnLanePlanning::Plan()-> 选择规划器PublicRoadPlanner::Plan() ->
分scenario处理Scenario::Process() ->分stage处理 LaneFollowStage::Process() ->顺序执行stage中的任务
2、Apollo中各场景
Apollo默认从lane follow场景开始判断,而且场景之间的跳转必须经过lanefollow这个场景。
switch (current_scenario_->scenario_type()) {
case ScenarioConfig::LANE_FOLLOW: // 车道线保持
case ScenarioConfig::PULL_OVER: // 靠边停车
break;
case ScenarioConfig::BARE_INTERSECTION_UNPROTECTED: //无保护十字路口
case ScenarioConfig::EMERGENCY_PULL_OVER: // 紧急靠边
case ScenarioConfig::PARK_AND_GO: // 停车和启动
case ScenarioConfig::STOP_SIGN_PROTECTED: // 停止标志
case ScenarioConfig::STOP_SIGN_UNPROTECTED:// 停止
case ScenarioConfig::TRAFFIC_LIGHT_PROTECTED: // 信号灯
case ScenarioConfig::TRAFFIC_LIGHT_UNPROTECTED_LEFT_TURN: //信号灯无保护左转
case ScenarioConfig::TRAFFIC_LIGHT_UNPROTECTED_RIGHT_TURN:
case ScenarioConfig::VALET_PARKING: // 代客泊车
case ScenarioConfig::DEADEND_TURNAROUND: //Apollo7.0中新增 路头调头
3、Lane_follow场景中task
Lane_follow场景中task以实际的场景为例,执行具体的路径规划算法和速度规划算法,各task功能如下:
stage_type: LANE_FOLLOW_DEFAULT_STAGE
enabled: true
// 路径规划
task_type: LANE_CHANGE_DECIDER // 判断当前是否进行变道,以及变道的状态
task_type: PATH_REUSE_DECIDER // 换道时:
// 根据横纵向跟踪偏差,来决策是否需要重新规划轨迹;
// 如果横纵向跟踪偏差,则根据上一时刻的轨迹生成当前周期的轨迹,以尽量保持轨迹的一致性
task_type: PATH_LANE_BORROW_DECIDER // 只是判断是否满足借道条件,具体的轨迹是否借道,是由后面的task决定
task_type: PATH_BOUNDS_DECIDER // 根据借道信息、道路宽度生成FallbackPathBound
// 根据借道信息、道路宽度生成、障碍物边界生成PullOverPathBound、LaneChangePathBound、
RegularPathBound中的一种
// 将车道线和障碍物转为上图中的边界
task_type: PIECEWISE_JERK_PATH_OPTIMIZER // 根据之前decider决策的reference line和path bound,
// 以及横向约束,将最优路径求解问题转化为二次型规划问题;
// 调用osqp库求解最优路径;
task_type: PATH_ASSESSMENT_DECIDER //选出之前规划的备选路径中排序最靠前的路径;
// 添加一些必要信息到路径中
task_type: PATH_DECIDER // 在上一个任务中获得了最优的路径,
// PathDecider的功能是根据静态障碍物做出自车的决策,对于前方的静态障碍物是忽略、stop还是nudge
task_type: RULE_BASED_STOP_DECIDER // 根据一些规则设定停止标志
//速度规划
task_type: ST_BOUNDS_DECIDER
task_type: SPEED_BOUNDS_PRIORI_DECIDER // 将规划路径上障碍物的st bounds加载到路径对应的st图上
// 计算并生成路径上的限速信息
task_type: SPEED_HEURISTIC_OPTIMIZER // 使用DP求解一条最优路径
task_type: SPEED_DECIDER //
task_type: SPEED_BOUNDS_FINAL_DECIDER //
#task_type: PIECEWISE_JERK_SPEED_OPTIMIZER //
task_type: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER //
task_type: RSS_DECIDER //
本文初步了解了规划模块的原理和流程,后续将详细讲解相关代码。
参考链接:
星火计划路径规划学习笔记
星火计划速度规划学习笔记
速度规划论文:
[1] Qian X , Altche F , Bender P , et al. Optimal Trajectory Planning for Autonomous Driving Integrating Logical Constraints: An MIQP Perspective[C]// IEEE International Conference on Intelligent Transportation Systems. IEEE, 2016.