ur3+robotiq ft sensor+robotiq 2f 140+realsense d435i配置rviz,gazebo仿真环境
搭建环境:
ubuntu: 20.04
ros: Nonetic
sensor: robotiq_ft300
gripper: robotiq_2f_140_gripper
UR: UR3
reasense: D435i
通过下面几篇博客配置好了ur3、力传感器和robotiq夹爪的rviz和gazebo仿真环境
ubuntu20.04配置UR机械臂的仿真环境
ur3+robotiq ft sensor+robotiq 2f 140配置rviz仿真环境
ur3+robotiq ft sensor+robotiq 2f 140配置gazebo仿真环境
下面我们给仿真环境加上Realsense D435i
1. 安装realsense-ros
克隆仓库链接
因为我使用的是ros1故采用ros1-legacy分支
将仓库克隆到之前的工作路径下
cd ~/catkin_ws/src
git clone https://github.com/IntelRealSense/realsense-ros.git
然后按照仓库中的readme教程安装,这里我采用的是方法二,因为之前我已经安装过RealSense SDK了,之前这一篇博客有安装RealSense SDK的教程,所以我下面直接跳到step2,仓库按照上面克隆到相应路径后,执行下面命令,跟着readme做就行了
cd cd ~/catkin_ws/src/realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
完了之后,需要安装一个ros工具包ddynamic_reconfigure,不然后面编译会出问题,做法是直接将仓库克隆到工作路径src文件夹下
cd ~/catkin_ws/src
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
后面直接按照readme命令编译,如果编译不过的话将工作目录下的build和devel删除重新编译试试
cd ~/catkin_ws/src
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
source devel/setup.bash
至此,realsense-ros就安装好了
2. 在rviz仿真环境中加上realsense D435i
根据之前ur3+robotiq ft sensor+robotiq 2f 140配置rviz仿真环境的博客,我们复制universal_robot/ur_description/urdf文件夹下的ur3_ft_gripper.xacro文件,并命名为ur3_ft_gripper_realsense.xacro,在该文件后面加上调用realsense的代码,加入代码如下:
<!-- Add realsense d435i -->
<xacro:arg name="use_nominal_extrinsics" default="false" />
<xacro:include filename="$(find realsense2_description)/urdf/_d435i.urdf.xacro"/>
<xacro:sensor_d435i parent="base" use_nominal_extrinsics="$(arg use_nominal_extrinsics)">
<origin xyz="0.4 0 1" rpy="0 1.57 0"/>
</xacro:sensor_d435i>
parent指定为base是因为在机械臂描述文件(urdf)中,base_link是连接在base上的,不是之前的world,该文件完整代码如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro" name="ur3_robot_ft_gripper">
<xacro:include filename="$(find ur_description)/urdf/inc/ur3_macro.xacro"/>
<xacro:ur3_robot prefix="" />
<xacro:include filename="$(find robotiq_ft_sensor)/urdf/robotiq_ft300.urdf.xacro"/>
<xacro:include filename="$(find robotiq_2f_140_gripper_visualization)/urdf/robotiq_arg2f_140.xacro" />
<!--robotiq_ft_sensor-->
<xacro:robotiq_ft300 prefix="" parent="tool0">
<origin xyz="0 0 0" rpy="0 0 0"/>
</xacro:robotiq_ft300>
<!--robotiq_arg2f_140.xacro已经调用了robotiq_arg2f_140宏定义,这里只需要把gripper和sensor用joint连接起来即可-->
<joint name="ft_gripper_joint" type="fixed">
<parent link="robotiq_ft_frame_id"/>
<child link="robotiq_arg2f_base_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<!-- Add realsense d435i -->
<xacro:arg name="use_nominal_extrinsics" default="false" />
<xacro:include filename="$(find realsense2_description)/urdf/_d435i.urdf.xacro"/>
<xacro:sensor_d435i parent="base" use_nominal_extrinsics="$(arg use_nominal_extrinsics)">
<origin xyz="0.4 0 1" rpy="0 1.57 0"/>
</xacro:sensor_d435i>
</robot>
复制universal_robot/ur_description/launch文件夹下中的view_ur3_ft_gripper.launch,load_ur3_ft_gripper.launch,load_ur_ft_gripper.launch文件,分别重命名为view_ur3_ft_gripper_realsense.launch,load_ur3_ft_gripper_realsense.launch,load_ur_ft_gripper_realsense.launch,分别改一下调用的文件名称
view_ur3_ft_gripper_realsense.launch修改如下图
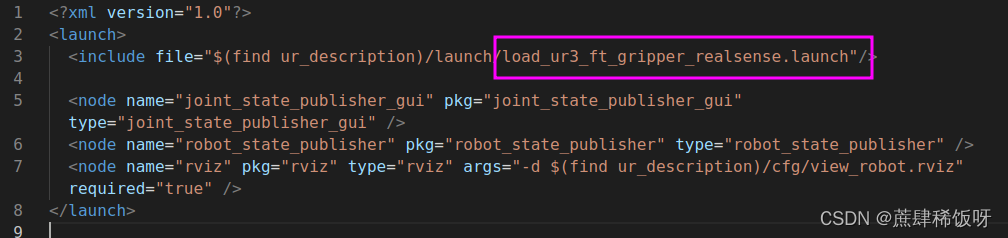
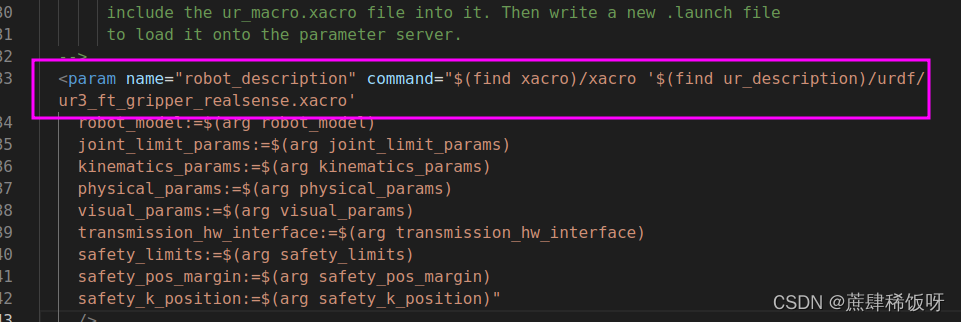
load_ur3_ft_gripper_realsense.launch修改如下图
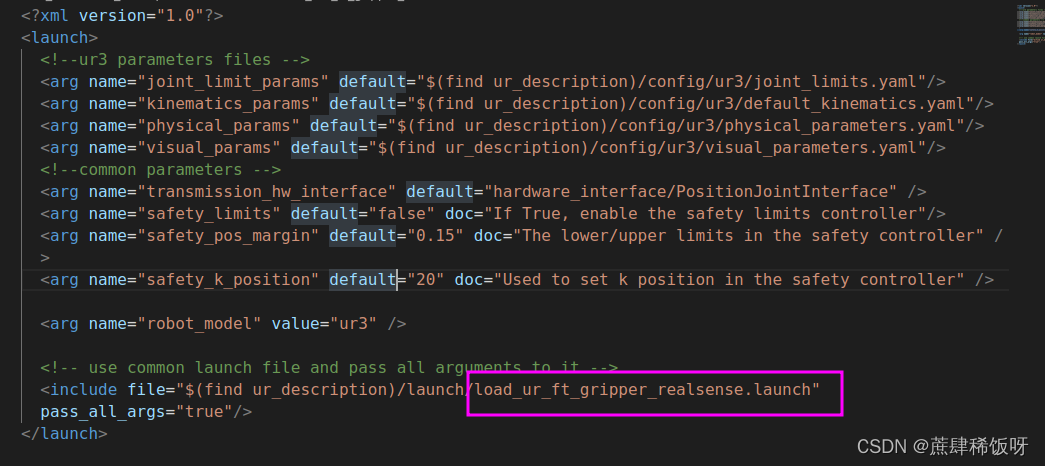
load_ur_ft_gripper_realsense.launch修改如下图
查看效果
运行命令
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur_description view_ur3_ft_gripper_realsense.launch
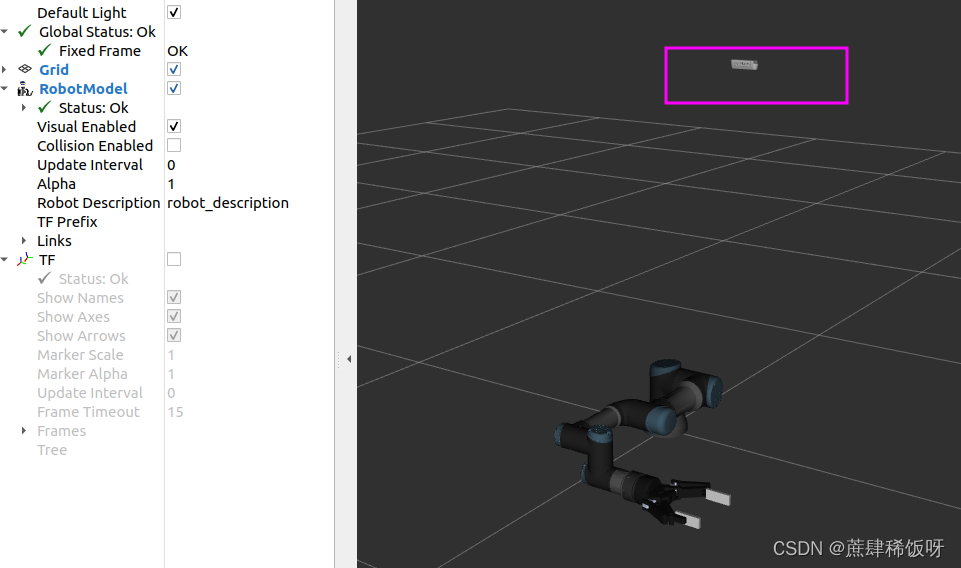
可以看到realsense已经加上去了
3. 在gazebo仿真环境中加上realsense D435i
在这里需要下载一个realsense模型和插件包,仓库地址
cd ~/catkin_ws/src
git clone https://github.com/nilseuropa/realsense_ros_gazebo.git
cd ..
# 编译一下,如果编译不过的话将工作目录下的`build`和`devel`删除重新编译试试
catkin_make
然后在universal_robot/ur_gazebo/urdf目录下ur_macro.xacro的文件中加上以下调用代码
<!-- Add realsense d435 -->
<xacro:include filename="$(find realsense_ros_gazebo)/xacro/depthcam.xacro"/>
<xacro:realsense_d435 sensor_name="d435" parent_link="base" rate="10">
<origin xyz="0.4 0 1" rpy="0 1.57 0"/>
</xacro:realsense_d435>
这里使用的是D435,而不是D435i,因为这个包里面没有D435i,先D435用着,后面参考这个博客手动添加IMU,达到D435i的效果,ur_macro.xacro文件完整代码如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro">
<!-- Definition of the main macro -->
<xacro:macro name="ur_robot_gazebo" params="
prefix
joint_limits_parameters_file
kinematics_parameters_file
physical_parameters_file
visual_parameters_file
transmission_hw_interface:=hardware_interface/EffortJointInterface
safety_limits:=false safety_pos_margin:=0.15 safety_k_position:=20"
>
<xacro:include filename="$(find ur_description)/urdf/inc/ur_macro.xacro"/>
<!-- Instantiate model for the REAL robot. -->
<xacro:ur_robot
prefix="${prefix}"
joint_limits_parameters_file="${joint_limits_parameters_file}"
kinematics_parameters_file="${kinematics_parameters_file}"
physical_parameters_file="${physical_parameters_file}"
visual_parameters_file="${visual_parameters_file}"
transmission_hw_interface="${transmission_hw_interface}"
safety_limits="${safety_limits}"
safety_pos_margin="${safety_pos_margin}"
safety_k_position="${safety_k_position}"
/>
<!-- Configure self collision properties per link -->
<gazebo reference="${prefix}shoulder_link">
<selfCollide>true</selfCollide>
</gazebo>
<gazebo reference="${prefix}upper_arm_link">
<selfCollide>true</selfCollide>
</gazebo>
<gazebo reference="${prefix}forearm_link">
<selfCollide>true</selfCollide>
</gazebo>
<gazebo reference="${prefix}wrist_1_link">
<selfCollide>true</selfCollide>
</gazebo>
<gazebo reference="${prefix}wrist_3_link">
<selfCollide>true</selfCollide>
</gazebo>
<gazebo reference="${prefix}wrist_2_link">
<selfCollide>true</selfCollide>
</gazebo>
<gazebo reference="${prefix}ee_link">
<selfCollide>true</selfCollide>
</gazebo>
<!--
Inject Gazebo ROS Control plugin, which allows us to use ros_control
controllers to control the virtual robot hw.
-->
<gazebo>
<plugin name="ros_control" filename="libgazebo_ros_control.so">
<!--robotNamespace>/</robotNamespace-->
<!--robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType-->
</plugin>
</gazebo>
</xacro:macro>
<xacro:include filename="$(find robotiq_ft_sensor)/urdf/robotiq_ft300.urdf.xacro"/>
<xacro:include filename="$(find robotiq_2f_140_gripper_gazebo)/urdf/robotiq_arg2f_140.xacro" />
<!--robotiq_ft_sensor-->
<xacro:robotiq_ft300 prefix="" parent="tool0">
<origin xyz="0 0 0" rpy="0 0 0"/>
</xacro:robotiq_ft300>
<!--robotiq_arg2f_140.xacro已经调用了robotiq_arg2f_140宏定义,这里只需要把gripper和sensor用joint连接起来即可-->
<joint name="ft_gripper_joint" type="fixed">
<parent link="robotiq_ft_frame_id"/>
<child link="robotiq_arg2f_base_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<!-- Add realsense d435 -->
<xacro:include filename="$(find realsense_ros_gazebo)/xacro/depthcam.xacro"/>
<xacro:realsense_d435 sensor_name="d435" parent_link="base" rate="10">
<origin xyz="0.4 0 1" rpy="0 1.57 0"/>
</xacro:realsense_d435>
</robot>
查看效果
运行命令
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur_gazebo ur3_bringup.launch
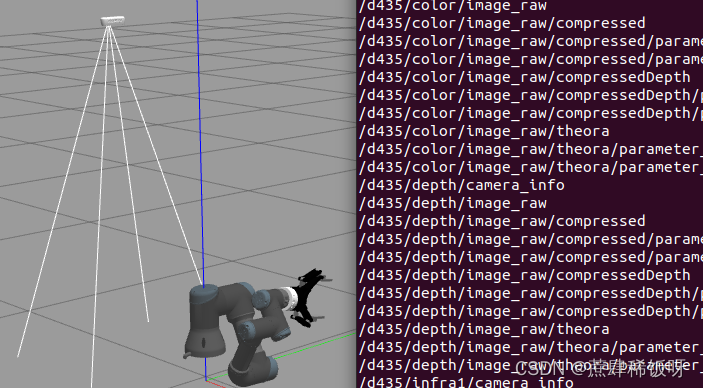
可以看到realsens已经加入到gazebo中,并且通过rostopic list看到其发布的话题