近期,在分析Thumb2指令的一个固件文件时,发现Thumb2指令集下执行函数的运行地址不对齐?
于是,为了分析一下原因,找了手头上现有的一款基于Cortex3内核的一块板子来实际执行看一下,结合编译后的Hex文件,通过IDA来进一步验证一下Thumb2运行地址不对其的现象。
操作示例:
- 固件代码
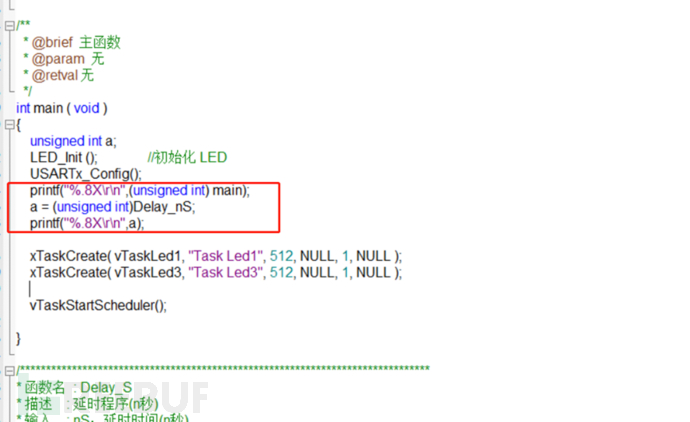
找了一个FreeRTOS的示例工程,加入几行打印函数地址的日志:
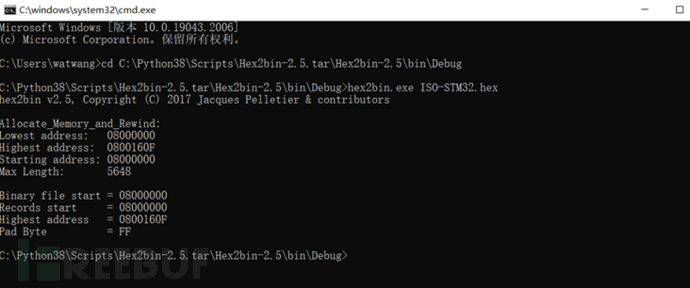
- 通过hex2bin将编译后的Hex文件转成二进制bin文件
执行情况:
- 通过ue打开bin文件备用,如下
* 通过Keil-IDE加载测试代码,如下:
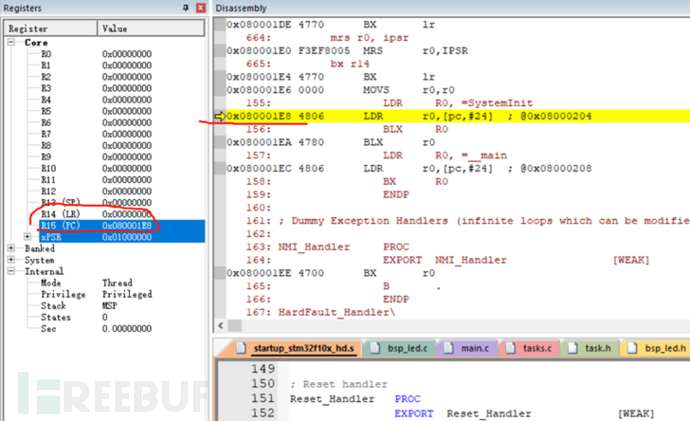
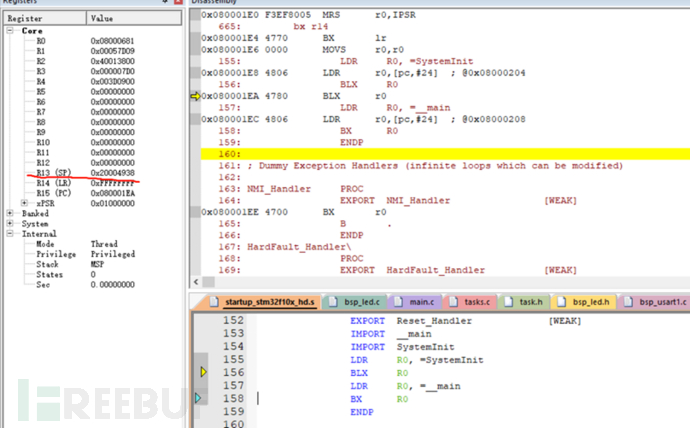
通过IDE
debug调试后,板子reset之后在内部时序逻辑的控制下,将0x00000000地址的内容读取到SP;将0x00000004地址的内容读取到PC。此时SP中存放的是栈顶地址,PC中存放的是Reset_Handler复位处理函数地址。
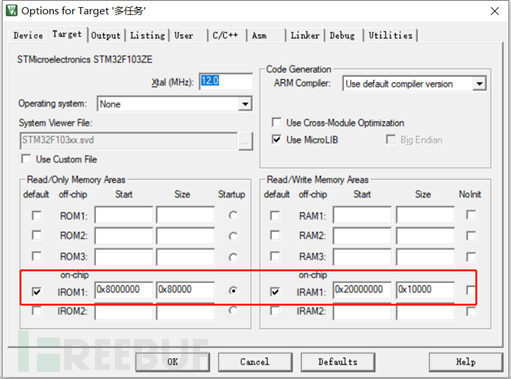
- 通过IDA Pro加载上述第二步生成的bin文件,配置过程如下:
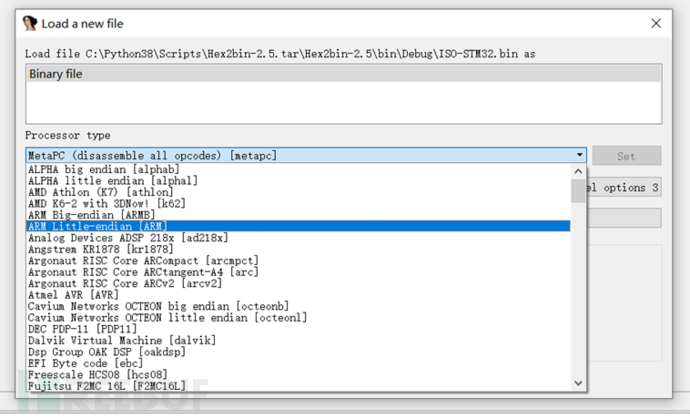
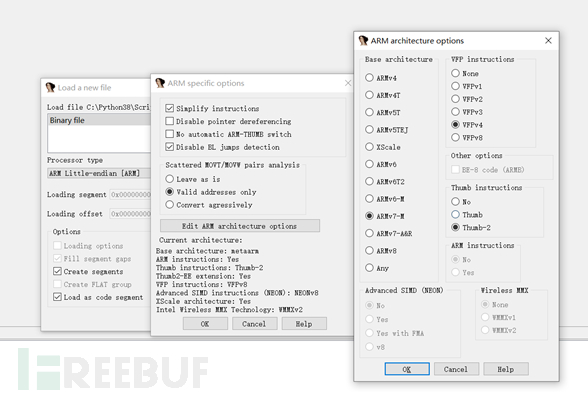
通过在示例工程中的配置,来定义加载到IDA中的内存及存储映射地址,如下:

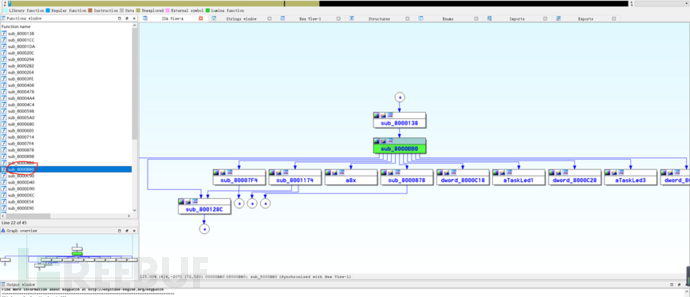
- ida 加载后如下:

- 顺利找到程序入口地址:
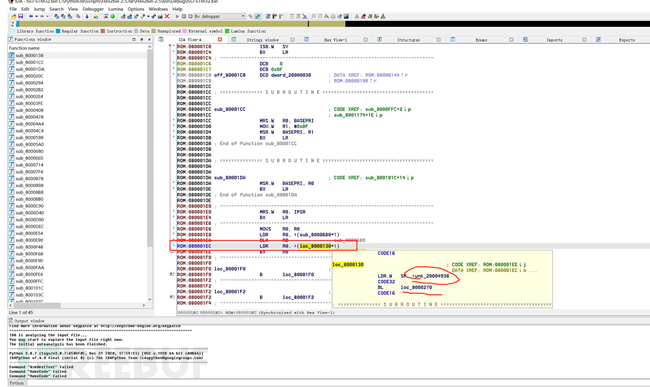
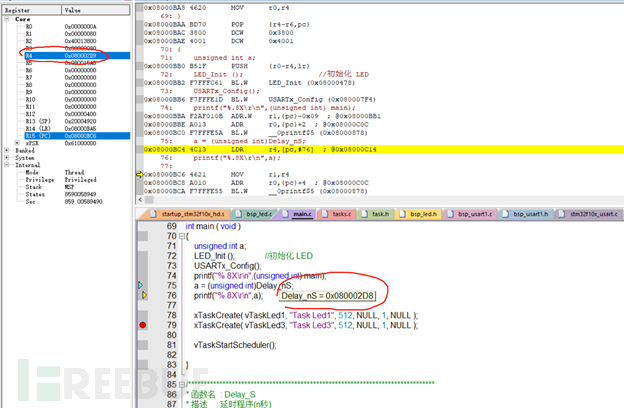
进而找到main函数的执行地址,发现通过ldr加载到寄存器时的地址为main函数真正地址+1;通过debug,也可以验证,如下:

通过资料了解到ARM指令是4字节对齐的,Thumb-2指令是2字节对齐的,所以这里main函数和函数Delay_nS的地址应该是2字节对齐的,但是打印出来的值却是:08000BB1和080002D9。main函数的地址和test函数的地址都成了奇数地址了。
这个问题在于有些ARM处理器即能使用ARM指令,又能兼容Thumb指令,同一个应用程序中可能同时存在ARM指令和Thumb指令,这两者的处理方式肯定是大不相同的,所以为了切换ARM状态和Thumb状态,在跳转到Thumb指令编写的代码块的时候,将程序地址的最低位置1(因为不管是ARM指令还是Thumb指令,都至少是2字节对齐的,所以最低位一定是0,所以最低位可以拿来用于区分ARM状态和Thumb状态),这样处理器识别到最低位为1的话就会切换到Thumb状态,否则则是ARM状态。Thumb2指令集也是为了兼容以前的ARM状态和Thumb状态所以这样做的。
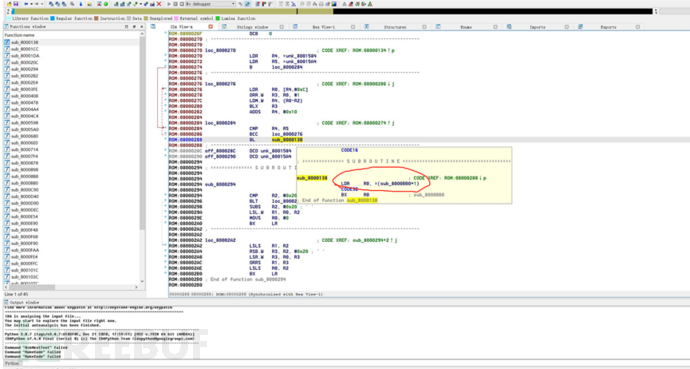
所以编译器编译STM32F1的程序的时候,会把函数的真实地址 加上1
作为常量放在ROM空间(如果这个函数的地址有被用到的话),获取函数的指针的时候就会获取到最低位被置1的一个地址。如下图,获取Delay_nS的地址的时候,到0x08000BC4地址处读取到了0x080002D9的值,这其实就是Delay_nS的真实地址0x080002D8
- 1得到的。
程序debug,打印出的日志如下:
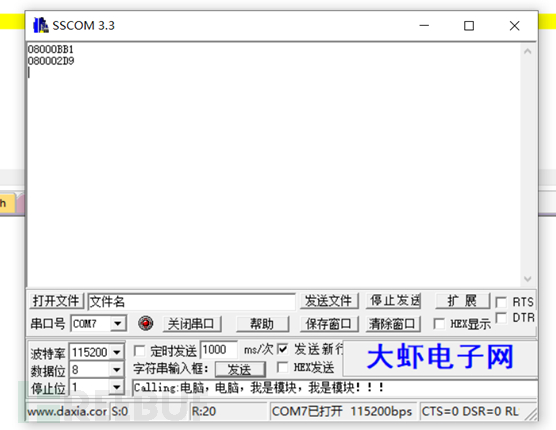
最后,在ue中固件文件中也找到了相应的Delay_nS函数的入口地址,实际在flash中的地址也是+1的,如下图:

也是+1的,如下图:
[外链图片转存中…(img-RToHkpTx-1677132990290)]
最后
对于从来没有接触过网络安全的同学,我们帮你准备了详细的学习成长路线图。可以说是最科学最系统的学习路线,大家跟着这个大的方向学习准没问题。

同时每个成长路线对应的板块都有配套的视频提供:

当然除了有配套的视频,同时也为大家整理了各种文档和书籍资料&工具,并且已经帮大家分好类了。
因篇幅有限,仅展示部分资料,有需要的小伙伴,可以【扫下方二维码】免费领取: