OpenCV版本:4.6.0.66
算法实现思路:
- 颜色识别(红色)
- 形态学去噪
- 轮廓检测
- 多边形拟合
- 透视矫正
代码实现:
import cv2
import numpy as np
# 可视化
def img_show(name, img):
cv2.namedWindow(name, 0)
cv2.resizeWindow(name, 1000, 500)
cv2.imshow(name, img)
cv2.waitKey(0)
def color_warped(path):
img = cv2.imread(path)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 颜色识别(红色),过滤红色区域
lower_red1 = np.array([0, 43, 46]) # 红色阈值下界
higher_red1 = np.array([10, 255, 255]) # 红色阈值上界
mask_red1 = cv2.inRange(hsv, lower_red1, higher_red1)
lower_red2 = np.array([156, 43, 46]) # 红色阈值下界
higher_red2 = np.array([180, 255, 255]) # 红色阈值上界
mask_red2 = cv2.inRange(hsv, lower_red2, higher_red2)
mask_red = cv2.add(mask_red1, mask_red2) # 拼接过滤后的mask
img_show('mask_red', mask_red)
# 形态学去噪,cv2.MORPH_OPEN先腐蚀再膨胀,cv2.MORPH_CLOSE先膨胀再腐蚀
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_OPEN, kernel, iterations=1)
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (7, 7))
mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_CLOSE, kernel, iterations=3)
img_show('mask_red', mask_red)
# 轮廓检测,找出线条的轮廓
draw_cnt = img.copy()
cnts = cv2.findContours(mask_red, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[0]
cv2.drawContours(draw_cnt, cnts, -1, (0, 255, 0), 2)
img_show('draw_cnt', draw_cnt)
# 四边形拟合,找到相应的的顶点
draw_approx = img.copy()
point1, point2 = list(), list()
for cnt in cnts:
for epsilon in range(50):
approx = cv2.approxPolyDP(cnt, epsilon, True)
if len(approx) == 4:
break
cv2.polylines(draw_approx, [approx], True, (0, 0, 255), 2) # 绘制边
for i in approx:
cv2.circle(draw_approx, i[0], 6, (0, 0, 0), -1) # 绘制顶点
approx = [i[0] for i in approx.tolist()]
approx = sorted(approx, key=lambda k: k[1], reverse=False) # 按y坐标排序,升序
point1.extend(approx[:2]) # 存放上顶点坐标
point2.extend(approx[2:]) # 存放下顶点坐标
point1.sort(key=lambda k: k[0], reverse=False) # 按x坐标排序,升序
point2.sort(key=lambda k: k[0], reverse=False)
img_show('draw_approx', draw_approx)
# 透视矫正目标区域
w, h = 900, 300
rect = [point1[0], point1[-1], point2[-1], point2[0]] # 顺序为第一个四边形的左上,第四个四边形的右上,第四个四边形的右下,第一个四边形的左下
pts1 = np.array(rect, dtype="float32")
pts2 = np.array([rect[0], [rect[0][0] + w, rect[0][1]],
[rect[0][0] + w, rect[0][1] + h], [rect[0][0], rect[0][1] + h]], dtype="float32")
M = cv2.getPerspectiveTransform(pts1, pts2) # 变换矩阵
img_warped = cv2.warpPerspective(img, M, (1500, 500)) # 透视变换
img_show('img_warped1', img_warped)
img_warped = img_warped[rect[0][1]: rect[0][1] + h, rect[0][0]: rect[0][0] + w] # 抠出变换后的区域
img_show('img_warped2', img_warped)
if __name__ == '__main__':
path = 'data/picture/18.jpg'
color_warped(path)
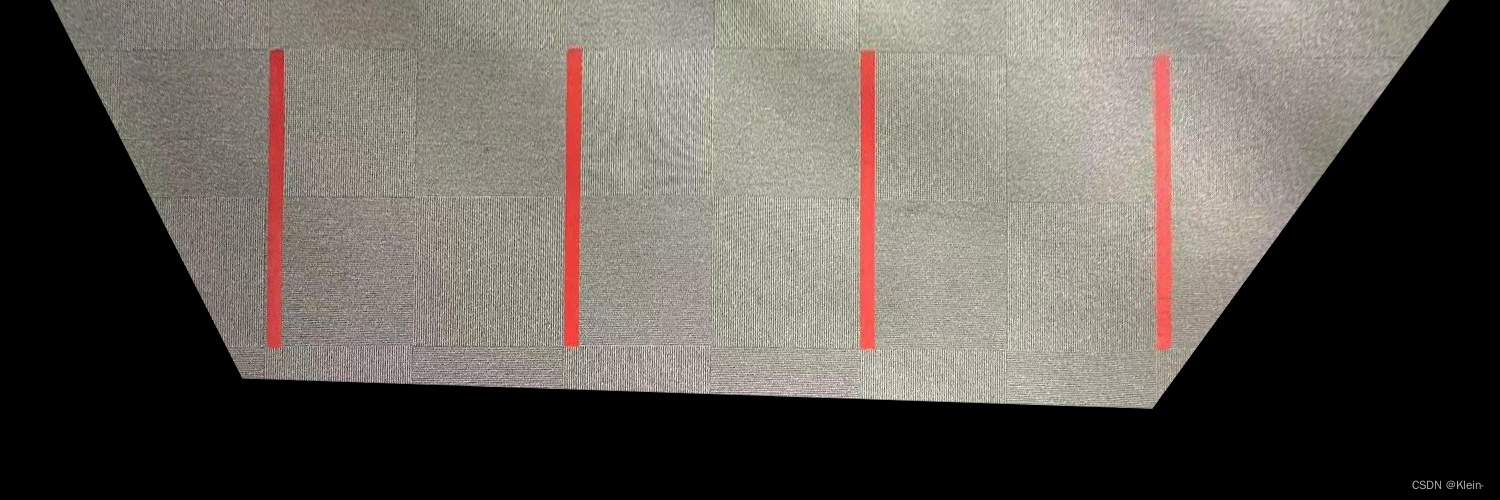
原图:

颜色识别(红色)
img = cv2.imread(path)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)颜色识别使用的通道是HSV通道。使用HSV通道识别颜色会比使用BGR通道更容易区分。H表示Hue(色调、色相,取值:0-180),S表示Saturation(饱和度、色彩纯净度,取值:0-255),V表示Value(亮度,取值:0-255),详情可见:HSV颜色空间。各颜色的取值范围如下:
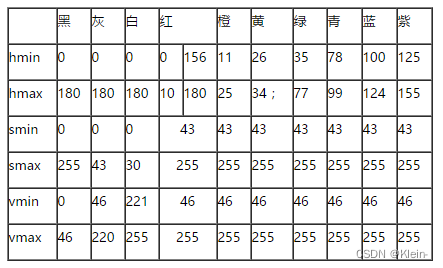
可见红色的取值范围有两个,大部分情况下这两个范围刚好是互补的,可根据实际情况调整。
# 颜色识别(红色),过滤红色区域
lower_red1 = np.array([0, 43, 46]) # 红色阈值下界
higher_red1 = np.array([10, 255, 255]) # 红色阈值上界
mask_red1 = cv2.inRange(hsv, lower_red1, higher_red1)
lower_red2 = np.array([156, 43, 46]) # 红色阈值下界
higher_red2 = np.array([180, 255, 255]) # 红色阈值上界
mask_red2 = cv2.inRange(hsv, lower_red2, higher_red2)
mask_red = cv2.add(mask_red1, mask_red2) # 拼接过滤后的mask过滤出来的二值图如下:

形态学去噪
# 形态学去噪,cv2.MORPH_OPEN先腐蚀再膨胀,cv2.MORPH_CLOSE先膨胀再腐蚀
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_OPEN, kernel, iterations=1)
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (7, 7))
mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_CLOSE, kernel, iterations=3)颜色识别有时候会有部分噪声被一起识别,这时候可以用形态学进行去噪。在使用cv2.morphologyEx进行形态学去噪之前,需要由cv2.getStructuringElement先定义卷积核的形状和大小。
cv2.getStructuringElement(shape, ksize)常用参数如下:
- shape:核的形状,cv2.MORPH_RECT(矩形),cv2.MORPH_CROSS(十字形),cv2.MORPH_ELLIPSE(椭圆形)
- ksize:核的大小,格式为(width, height)
cv2.morphologyEx(src, op, kernel, iterations) 常用参数如下:
- src:输入图像
- op:形态学操作的类型,cv2.MORPH_ERODE(腐蚀),cv2.MORPH_DILATE(膨胀),cv2.MORPH_OPEN(开运算),cv2.MORPH_CLOSE(闭运算),cv2.MORPH_GRADIENT(梯度运算),cv2.MORPH_TOPHAT(礼帽运算),cv2.MORPH_BLACKHAT(黑帽运算),详情可见:形态学运算
- kernel:进行形态学操作的卷积核
- iterations:形态学操作迭代的次数,默认值为1
效果如下:

轮廓检测
# 轮廓检测,找出线条的轮廓
draw_cnt = img.copy()
cnts = cv2.findContours(mask_red, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[0]
cv2.drawContours(draw_cnt, cnts, -1, (0, 255, 0), 2)使用cv2.findContours(image, mode, method)检测轮廓,常用参数如下:
- image:二值图
- mode:轮廓的检索模式
cv2.RETR_EXTERNAL 只检测外轮廓 cv2.RETR_LIST 检测的轮廓不建立等级关系 cv2.RETR_CCOMP 建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层 cv2.RETR_TREE 建立一个等级树结构的轮廓
- method:轮廓的近似方法
cv2.CHAIN_APPROX_NONE 存储所有的轮廓点,相邻的两个点的像素位置差不超过1 cv2.CHAIN_APPROX_SIMPLE 压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标
使用cv2.drawContours绘制轮廓,效果如下:

近似多边形
# 四边形拟合,找到相应的的顶点
draw_approx = img.copy()
point1, point2 = list(), list()
for cnt in cnts:
for epsilon in range(50):
approx = cv2.approxPolyDP(cnt, epsilon, True)
if len(approx) == 4:
break
cv2.polylines(draw_approx, [approx], True, (0, 0, 255), 2) # 绘制边
for i in approx:
cv2.circle(draw_approx, i[0], 6, (0, 0, 0), -1) # 绘制顶点使用cv2.approxPolyDP(curve, epsilon, closed)近似多边形,常用参数如下:
- curve:输入二维点集的数组
- epsilon:近似结果的精度。这是原曲线和其近似曲线之间的最大距离。epsilon越小,近似结果的折线形状越“接近”曲线。详情可见:近似多边形
- closed:True或False。True表示近似曲线是闭合的(第一个顶点与最后一个顶点相互连接),False表示近似曲线是不闭合的
cv2.approxPolyDP返回近似多边形的顶点坐标,这里用范围内的值遍历epsilon精度,当返回的顶点坐标数量为4时,即为四边形。
对每个轮廓进行四边形拟合,使用cv2.polylines和cv2.circle分别绘制边和顶点,效果如下:

四边形拟合完成后,对每个四边形的顶点进行排序。
透视矫正
# 透视矫正目标区域
w, h = 900, 300
rect = [point1[0], point1[-1], point2[-1], point2[0]] # 顺序为第一个四边形的左上,第四个四边形的右上,第四个四边形的右下,第一个四边形的左下
pts1 = np.array(rect, dtype="float32")
pts2 = np.array([rect[0], [rect[0][0] + w, rect[0][1]],
[rect[0][0] + w, rect[0][1] + h], [rect[0][0], rect[0][1] + h]], dtype="float32")
M = cv2.getPerspectiveTransform(pts1, pts2) # 变换矩阵
img_warped = cv2.warpPerspective(img, M, (1500, 500)) # 透视变换使用cv2.warpPerspective进行透视变换之前,需要先由cv2.getPerspectiveTransform获取变换矩阵。
cv2.getPerspectiveTransform(src, dst)常用参数如下:
- src:变换前图像四边形的顶点坐标(数组),其中任意三点不共线
- dst:变换后图像四边形的顶点坐标(数组),其中任意三点不共线
这里输入变换前四边形的顶点坐标,分别为第一个四边形的左上坐标,第四个四边形的右上坐标,第四个四边形的右下坐标,第一个四边形的左下坐标;输入变换后四边形的顶点坐标,是以第一个四边形的左上坐标延长宽和高。
cv2.getPerspectiveTransform(src, M, dsize)常用参数如下:
- src:输入图像
- M:变换矩阵
- dsize:输出图像大小
变换效果如下:
img_warped = img_warped[rect[0][1]: rect[0][1] + h, rect[0][0]: rect[0][0] + w] # 抠出变换后的区域将变换后的区域抠出来,效果如下:

参考链接
三分钟带你快速学习RGB、HSV和HSL颜色空间 - 知乎
第8章 形态学操作 -- 8.3 核函数 cv2.getStructuringElement()_Enzo 想砸电脑的博客-CSDN博客
Python +OpenCV CH9:形态学操作(morphologyEx扩展)_liguoxin1990的博客-CSDN博客
Python OpenCV approxPolyDP()函数
多边形逼近cv2.approxPolyDP和Douglas-Peucker算法_00000cj的博客-CSDN博客_多边形逼近算法