PX4开源飞控是目前主流的开源飞控项目,被很多公司作为飞控开发的参考。也广泛被用于现在流行的evtol验证机的飞控,进行初步的飞行验证。可能大多数AAM以及UAM都离不开PX4。
项目代码可以从github下载
$ git clone --recursive GitHub - PX4/PX4-Autopilot: PX4 Autopilot Software
这里采用–recursive选项,因为PX4项目包含很多子项目,可以同步下载,或者采用
$ git clone https://github.com/PX4/PX4-Autopilot
$ git submodule update --init --recursive
分步下载代码库和子代码库,如果有github连接不稳定的情况,可以多次执行git submodule update来下载所有的子代码库。
项目代码结构大致如下
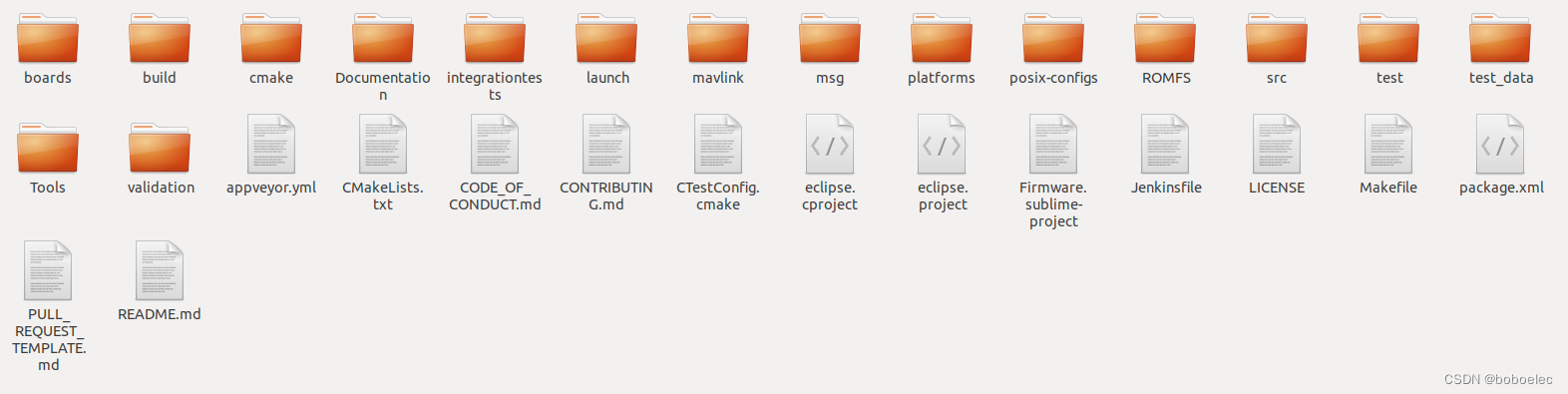
其中主要的目录有
1 boards
各种飞控硬件平台的配置文件
2 build
编译产生的目录,make之后生成的文件放置在这个目录
3 cmake
cmake编译配置目录
4 Documentation
开发者文档目录,包括代码说明等
5 launch
仿真环境用到的文件,包括ROS节点配置等
6 mavlink
通讯协议文件,定义和实现PX4与地面站之间的通讯协议。
7 msg
uORB消息定义文件,定义PX4程序之间通讯的消息格式。
8 platforms
系统平台实现的文件,包括PX4采用的Nuttx操作系统的源代码。
9 ROMFS
系统启动调用的脚本,ROMFS\px4fmu_common\ini.d\rcS是启动脚本,rcS中又调用rc.sensors,rc.mc_apps等文件。
rcS:最先启动的脚本,负责挂载SD,启动uORB、配置系统参数等。
rc.sensors:启动传感器驱动。
rc.mc_apps:启动上层应用,如commander(指令处理)、att_control(姿态控制)、pos_control(位置控制)等。
10 src
源代码目录,包含驱动、测试示例、模块实现等源代码。
10.1 drivers
包含了飞控硬件系统中使用的所有驱动代码。
10.2 examples
PX4系统给的一些简单的实例,为了便于开发者做二次开发调试测试使用。如px4_simple_app,示例了如何通过uORB获取需要的数据。
10.3 lib
包含一些标准库,如矩阵运算、加密/解密、PID算法等
10.4 modules
包含所有上层应用的模块实现,PX4的上层程序都是通过模块的形式来运行(类似于ROS里面的节点),每一个模块订阅和发布uORB信息。模块包括姿态解算、姿态控制、位置控制、命令处理(commander)等。其中commander是实现整个任务模式调度的代码,包括pixhawk灯显控制、飞行模式切换、上锁解锁等。下面是其中一些module的介绍:
attitude_estimator_ekf:采用EKF算法实现的姿态估计
attitude_estimator_q: 使用mahony的互补滤波算法实现姿态解算。
mc_att_control:即multi-copter attitude control,多轴飞行器的姿态控制算法实现,主要就是姿态的内外环PID控制,外环角度控制,内环角速度控制。
mc_pos_control: multi-copter position control,多轴飞行器的位置控制算法实现,主要是位置的内外环PID控制,外环速度控制,内环加速度控制。
commander: 整个系统的任务调度,包括命令处理、事件处理、飞行模式切换等。
land_detector: 飞行过程中使用land模式降落或者落地时的落地监测部分,内部会监测Z轴速度和加速度等。
local_position_estimator: 常说的LPE算法实现位置解算。
mavlink: 和地面站通信的通信协议,结合地面站QGC源码配合修改,或者仅仅调用mavlink内部的API接口,即可通过无线信号将所需的数据显示在地面站QGC上,此方法是一种实时监测目标数据的方法。
logger: 关于log日志的读写函数。
飞控固件的生成由make来实现,如
$ make px4_fmu-v5_default #v5默认
$ make px4_sitl_default gazebo #gazebo仿真
总结
整个代码实现主要涉及的包含:
platforms - 系统实现,系统底层实现,如分时控制,多线程调度,消息机制等
src/drivers - 驱动实现,设备驱动,如陀螺仪/加速度计、GPIO、I2C等硬件底层实现
src/modules - 应用实现,控制模块、任务调度等
ROMFS/px4fmu_common/ini.d/rcS - 启动脚本,里面指定了启动哪些程序、哪些模块
Makefile - 系统编译生成的配置
研究整个项目的生成和运行可以了解rcS,Makefile等编译生成文件和启动脚本,
了解系统底层实现可以看platforms,src/drivers等目录内容,
了解飞行控制的实现和算法主要查看src/modules中的内容。