目录
理论参考
仿真实现
运行演示
总结
前段实时搭过高阶的滑模观测器,相比于高阶的,普通的滑模观测器计算量小更适合计算能力低的MCU,这里参考Microchip的16位MCU所使用的观测器,通过Simulink建模仿真实现系统控制,再通过自动代码生成集成到STM32单片机,实现滑模无感控制。以下为开发过程的总结:
理论参考
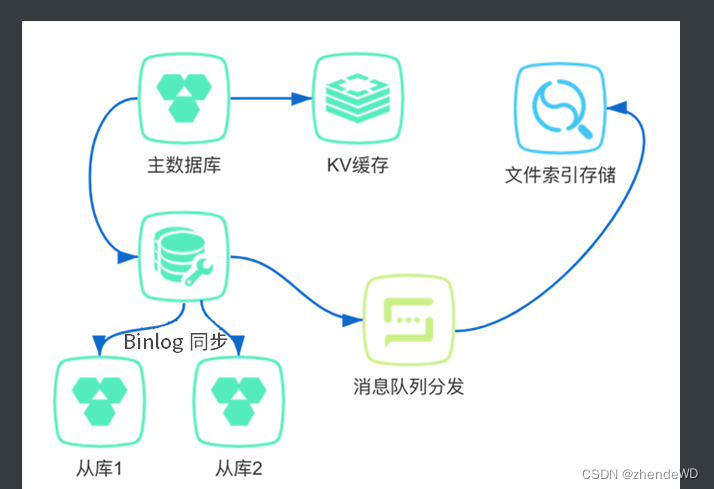
这里参考的是Microchip 开放的文档AN1078 ,框图如下:
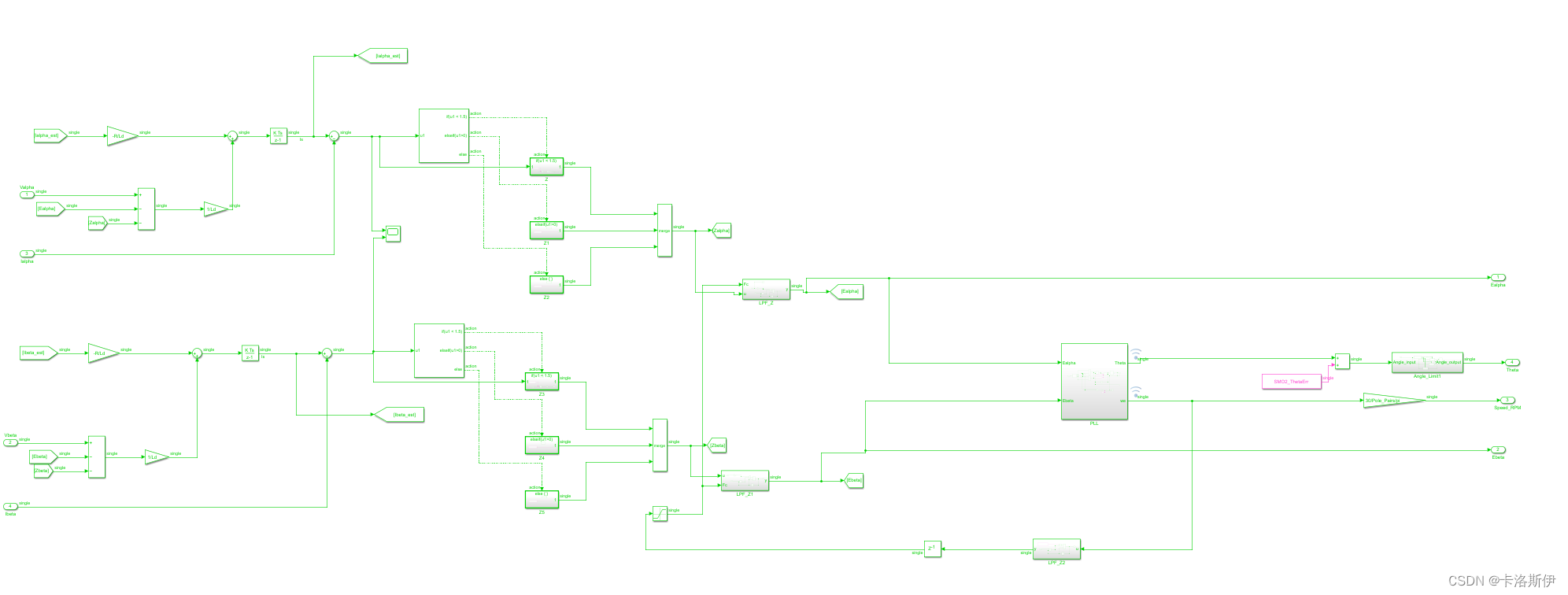
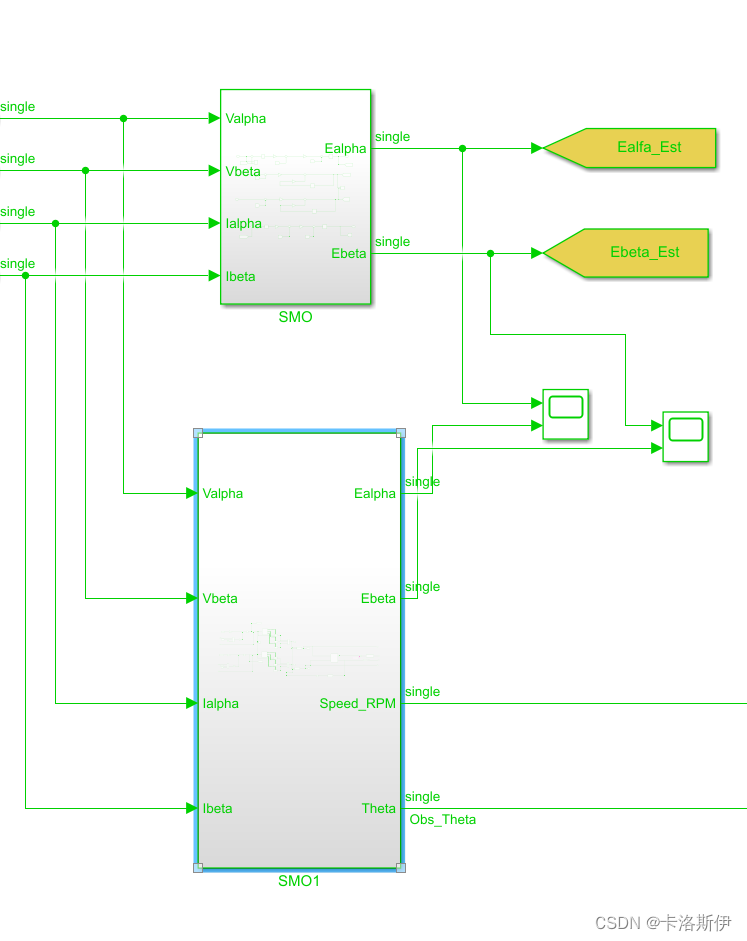
模型的搭建参照下图
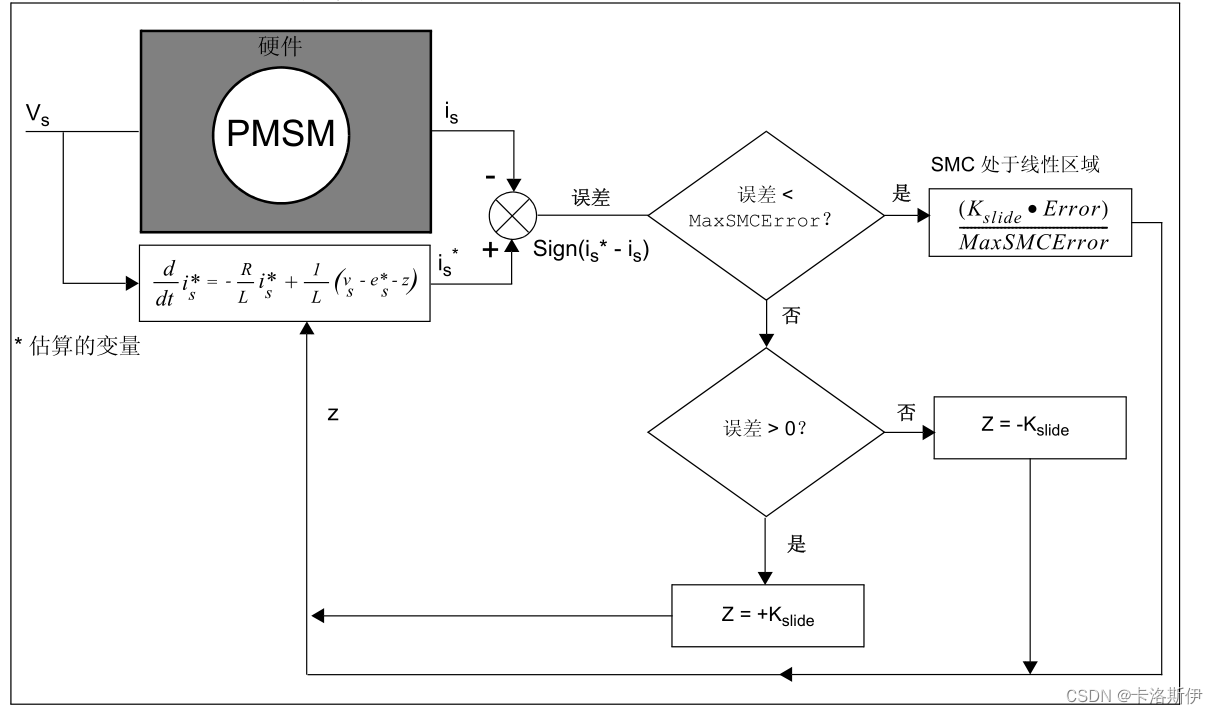
滑模观测器需要调整的参数有Kslide和MaxSMCError,按照上面框图搭好模型后对Z进行低通滤波就得到了估算的反电动势e*。如下图,得到估算的e*又对其进行了低通滤波,再做反正切得到了角度。
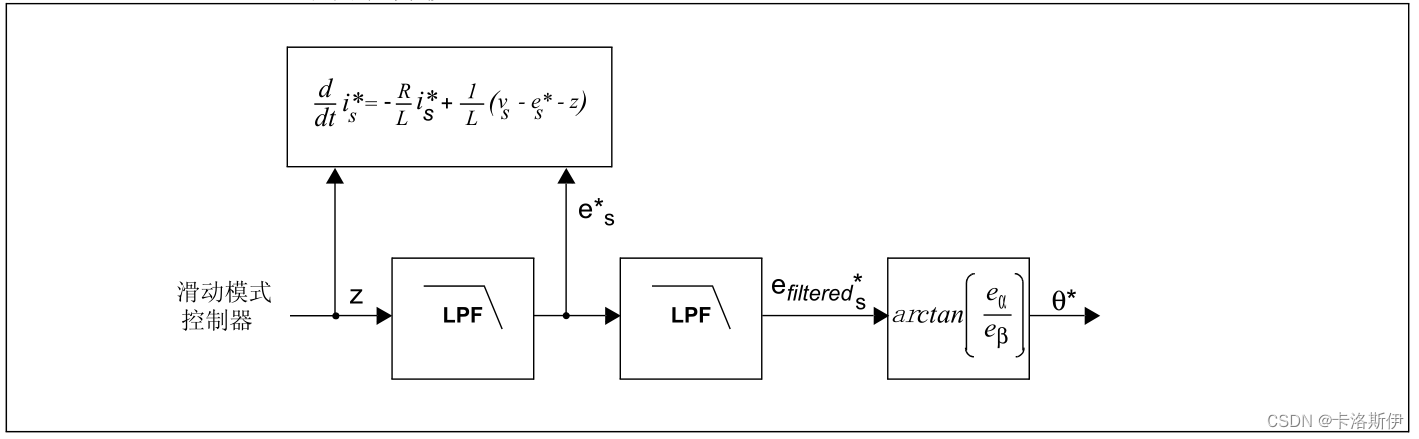
由于引入了LPF,导致了观测到的反电动势滞后,观测出来的角度会有误差,需要加上角度补偿。
如果固定一个滤波器的截止频率,当转速发生变化时,误差角也会相应的发生变化。解决方法是自动调整滤波器的截止频率。达到自适应的LPF,这样输出的误差角就是一个固定值,只需要补偿一个固定的角度误差即可。
仿真实现
搭建模型如下,和Microchip有些不同的地方,这里计算角度前没有对e*进行LPF滤波,但是对Z进行了滤波,因此角度滞后的现像还是在的。
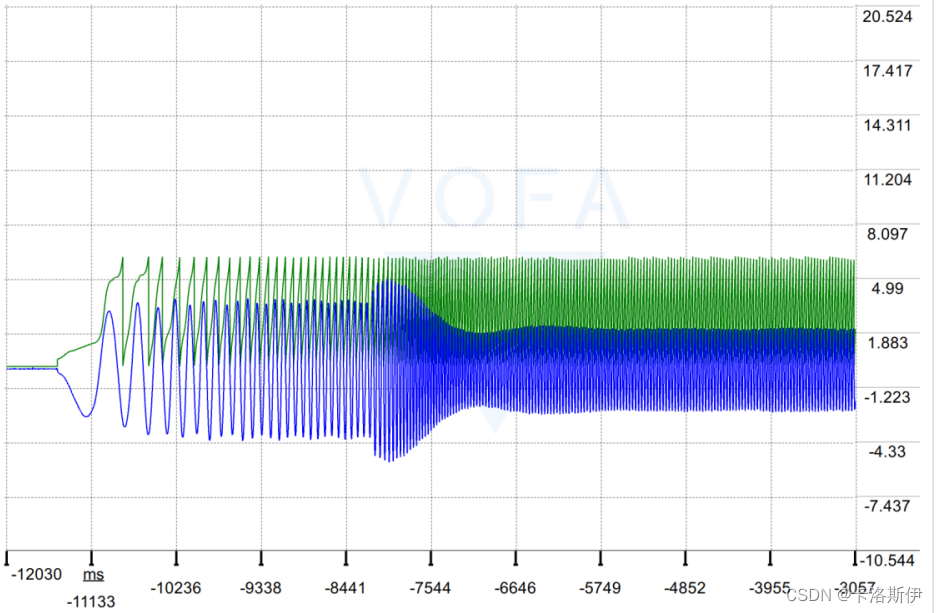
如下,实际的反电动势相位和滑模估算出来的反电动势相位,Ealpha为例:
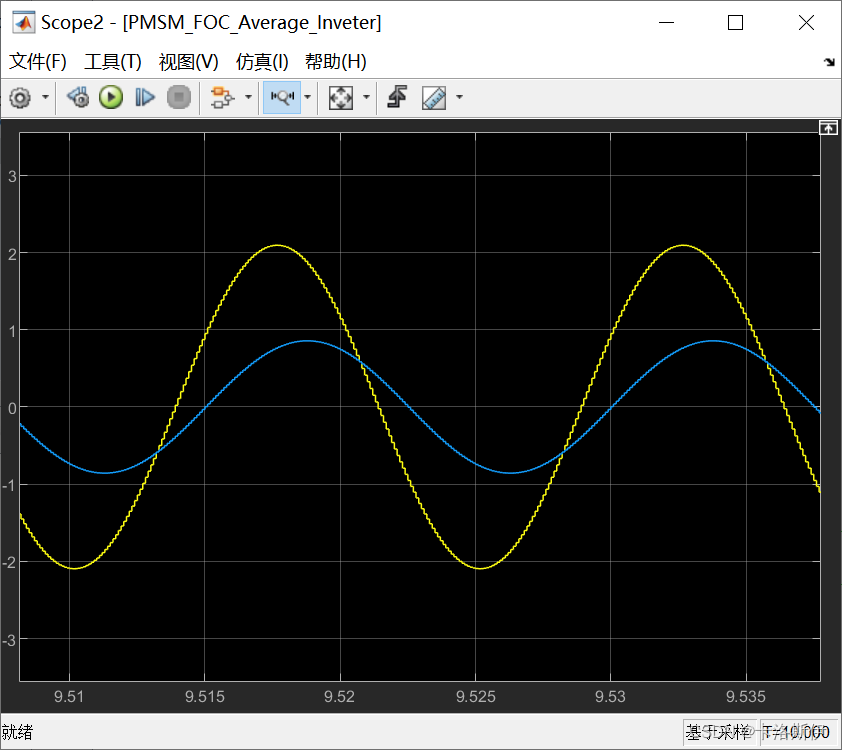
计算出来的角度就会存在一个固定的角度差,如下对其进行补偿:
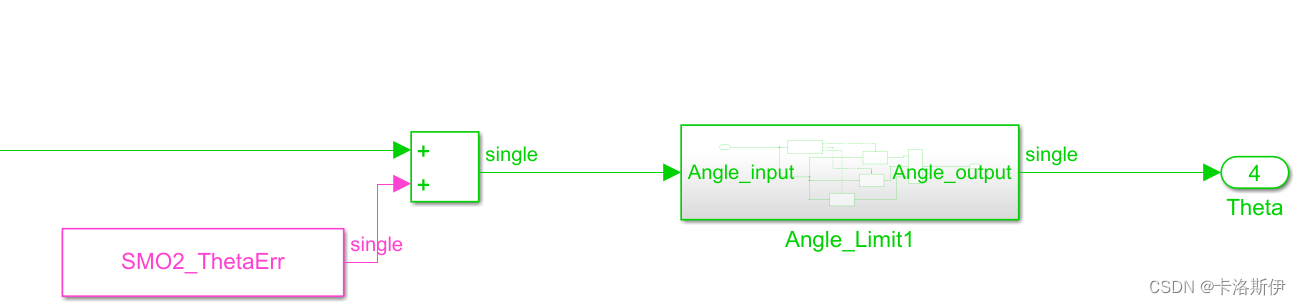
补偿后各个速度段的角度和实际角度基本一致:

启动仿真运行演示:
启动添加了IF开环,2s后进入闭环,仿真没有问题。
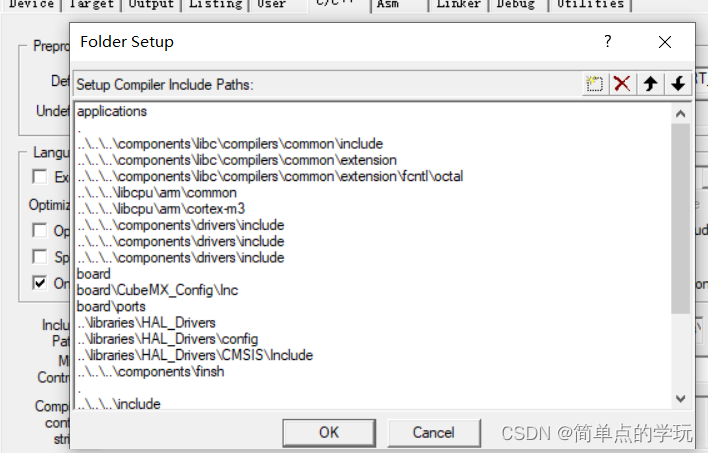
生成代码并集成:
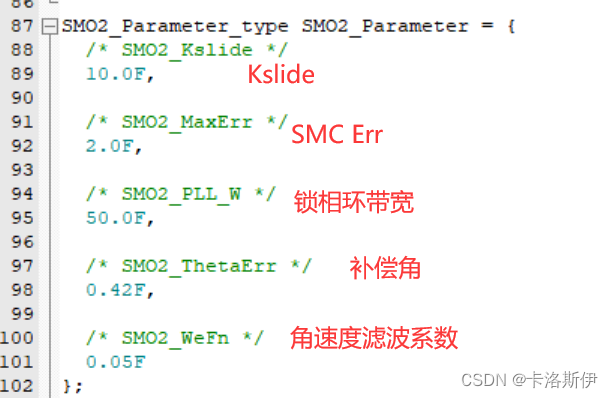
需要调整的参数如下,这里可以用反正切,也可以用锁相环来计算角度,不管用哪一种,都需要一个补偿角。
运行演示
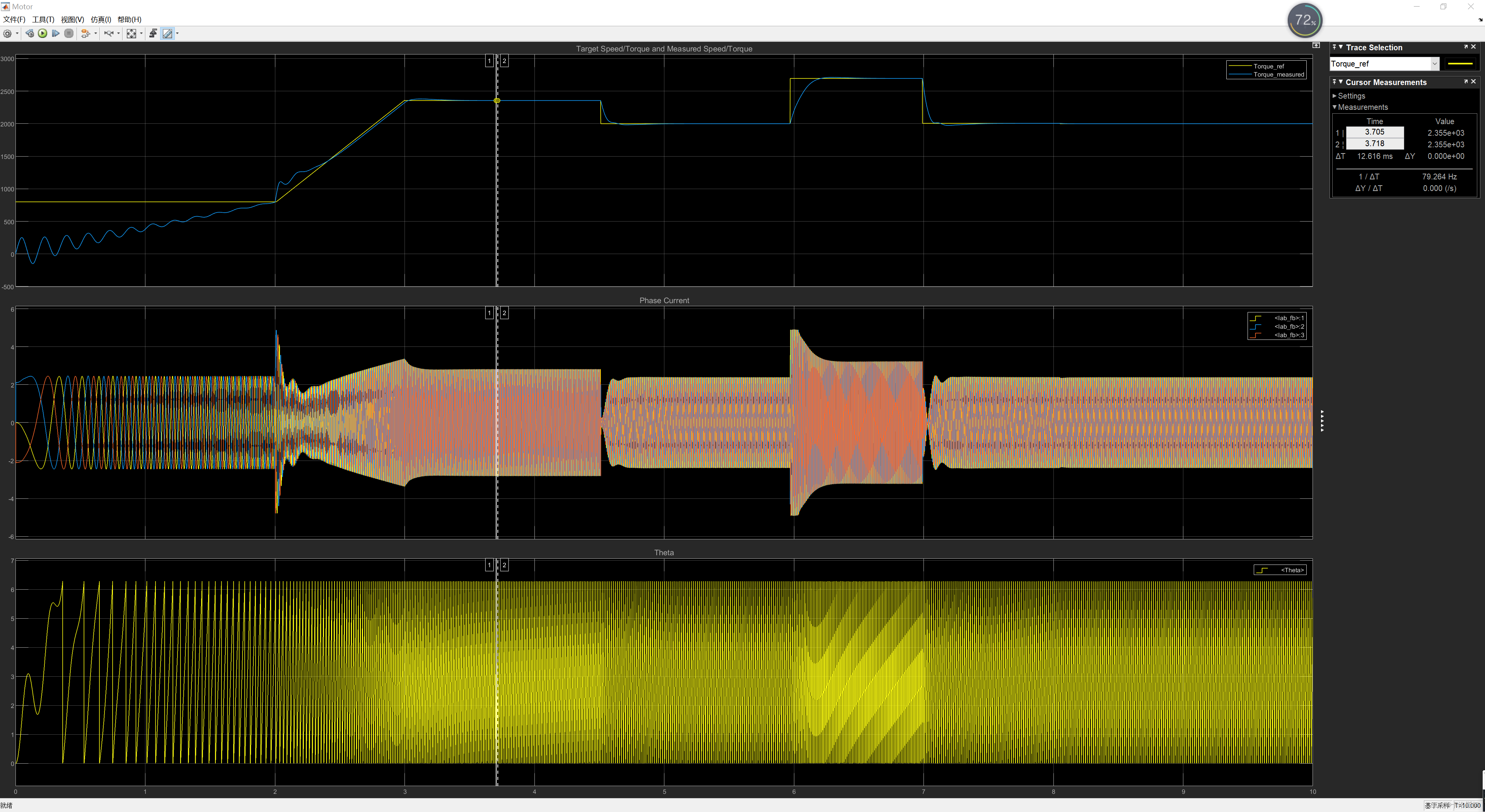
编译下载到开发板后,运行效果如下:
带载启动波形:
运行视频
普通滑模演示
总结
通过实验验证这种简单的滑模估算方法可行,效果也可以,速度变化也能正常使用,这里通过锁相环替换了参考文献的反正切也能正常工作。另外构建了另一个滑模观测器,这个观测器输出的反电动势相位没有发生滞后,开发板运行效果和本文所说的效果基本一致。



![[LeetCode周赛复盘] 第 333 场周赛20230219](https://img-blog.csdnimg.cn/29f6f204ccfb4ecf90a7b04f6c94d905.png)
![[软件工程导论(第六版)]第4章 形式化说明技术(课后习题详解)](https://img-blog.csdnimg.cn/37f1c0fcae3c441bba29c077435f1f3c.png)