目录
任务描述
简易输送带外部设备创建
输送带模型添加与配置
工件安装到输送带
输送带输送工件程序编写与仿真运行
任务描述
在MotoSimEG-VRC中创建1条输送带,并且能够实现将工件从输送带起始点位置处输送到结束点位置处。
简易输送带外部设备创建
在MotoSimEG-VRC中支持创建输送带设备,并且能够自动生成简易的输送带模型。
新建虚拟仿真项目,在软件“Controller”菜单栏下的“External Device”命令组中,点击“New”命令按钮,在其下拉菜单中点击“Conveyor”![]() ,弹出Conveyor Installation对话框。
,弹出Conveyor Installation对话框。
在对话框的No功能区下点选输送带编号,本例中选择“No1”,点选完编号后在Name下的显示框内自动生成输送带名称,Joint Num下点选输送带旋转轴编号,这里选择“1”,如下图所示,点击“OK”按钮。

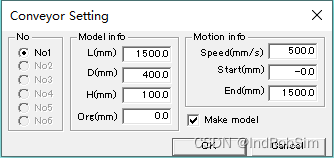
此时弹出Conveyor Setting对话框,在对话框中可以设置输送带模型的尺寸参数与运动参数,各个参数的详细说明如下。
No:显示或指定要设置参数的输送带编号。
Model in fo:设置输送带模型的尺寸参数,包括输送带长度(L)、宽度(D)、高度(H)以及原点位置(Org)。
Motion in fo:设置输送带的运动参数,包括输送带的运行速度(Speed)、输送起始点位置(Start)和输送结束点位置(End)。
Make model:设置是否生成默认输送带模型。

当然,输送带参数配置也可以在后续单独完成。因此,这里保持默认,直接点击“OK”按钮。
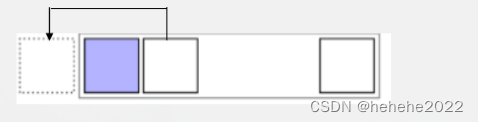
软件虚拟仿真环境中出现简易输送带模型,如下图所示,其中深绿与浅绿相间的是简易输送带台面,蓝色的箭头是输送带的移动标记,深绿与浅绿的分界线位置是输送带的原点位置,箭头所在的位置是输送带的输送起始点位置,箭头所指方向就是工件输送的正方向。

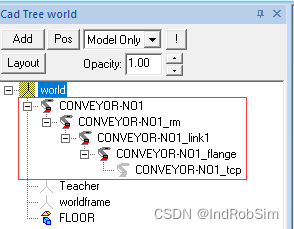
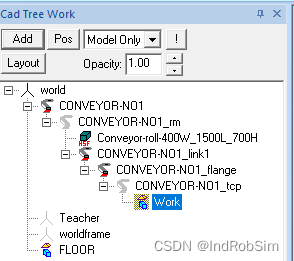
同时,在左侧的Cad Tree中出现输送带模型文件,其名称就是Conveyor Installation对话框中Name下显示的输送带名称,如下图所示。
与冲压机、龙门架一样,输送带也可以通过“Position Panel”进行手动运行,其操作方法也一样,这里不再赘述。

同样的,输送带的自动运行程序也是在“Job Panel”中进行示教,示教编程方法可以参考冲压机的示教编程步骤,这里也不再过多介绍。
默认情况下,简易输送带创建完成后,Job Panel中会自动创建出工件在输送带上移动的2条运动程序,如下图所示。

关于输送带手动运行与示教编程的详细操作步骤,可以参考之前发过的文章《MotoSimEG-VRC软件:冲压机添加以及与机器人信号交互虚拟仿真》。
输送带模型添加与配置
简易输送带虽然也可以仿真运行,但是看起来并不是那么逼真。为了能够再现真实的输送带运行效果,还需要添加输送带模型。
在Cad Tree中选择世界坐标系作为参考对象,然后从MotoSimEG-VRC的内置模型库(Model Library)中导入输送带模型,本案例导入的输送带模型名称为Conveyor-roll-400W_1500L_700H。
从输送带的名称中可以发现,输送带的长度为1500mm,宽度为400mm,高度为700mm,可以根据这些尺寸参数设置简易输送带的尺寸参数。
在软件“Controller”菜单栏下的“External Device”命令组中,点击“Conveyor Settings”![]() 命令按钮,再次弹出Conveyor Setting对话框。
命令按钮,再次弹出Conveyor Setting对话框。
在对话框中,设置简易输送带模型的尺寸参数与运动参数,如下图所示。
为了能够让添加的输送带模型具备运动特性,还需要将其与简易输送带进行关联。
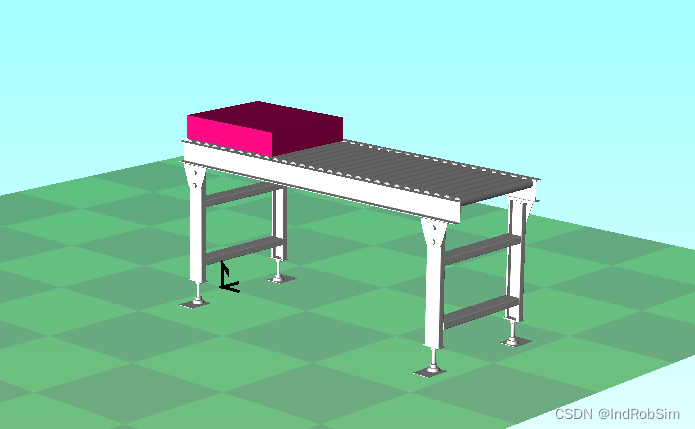
首先将输送带模型绕Z轴旋转-90°(Rz=-90),然后将简易输送带整体向上移动600mm,这样简易输送带模型的台面就与输送带模型的台面重合了,其效果如下图所示。

在Cad Tree中,使用“Set Parent”命令设置输送带模型的父级参考对象为简易输送带下的“CONVEYOR-NO1_rm”,如下图所示。

然后在Cad Tree中右击“CONVEYOR-NO1_rm”,在弹出的快捷菜单中依次选择“Hide/See”→“Model”,将简易输送带台面模型隐藏,如下图所示。

这样,添加的输送带模型就与简易输送带关联了起来,也就具备了运动特性。
工件安装到输送带
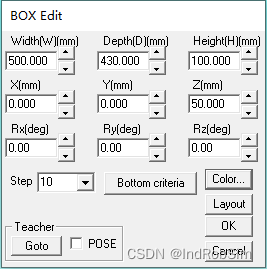
在MotoSimEG-VRC中,利用软件自带的模型创建工具创建1个长方体,并将其命名为“Work”,作为输送带要输送的工件。
在Cad Tree中,使用“Pos”工具,将工件放置到输送带输送起始点位置处(蓝色箭头处)如下图所示。
再使用“Set Parent”命令,将工件的父级参考对象设置为输送带模型的“CONVEYOR-NO1_tcp”,这样工件就能够在输送带上移动了。
最后,在Cad Tree中右击“CONVEYOR-NO1_link1”,在弹出的快捷菜单中依次选择“Hide/See”→“Model”,将简易输送带模型的移动标记隐藏。
输送带输送工件程序编写与仿真运行
在MotoSimEG-VRC中,先使用Position Panel将工件手动移动到输送带输送的结束点位置处,如下图所示。
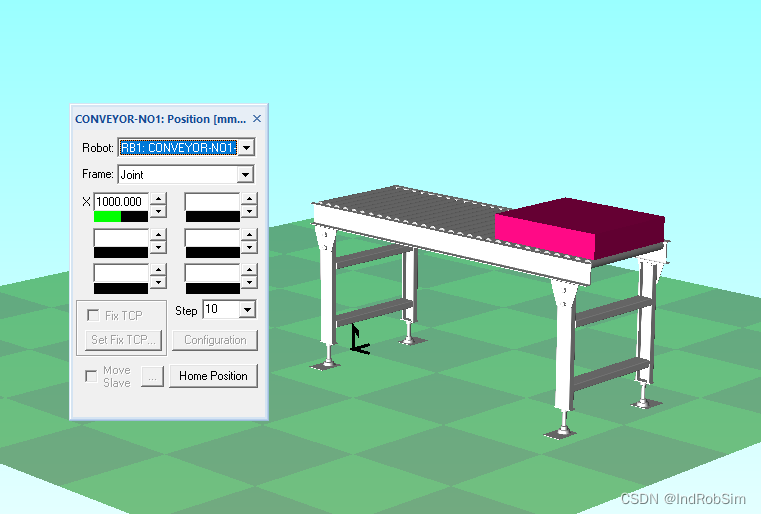
然后,打开Job Panel,将第2条运动程序示教为当前位置。选择程序时可以先取消勾选左侧的“Sync”,这样工件就不会同步运动到程序的示教点位处了。
程序编写完成后对其仿真运行,运行效果如下方动态图所示,可以看到工件从输送带起始位置处输送到了结束位置处。
The End
上一篇:MotoSimEG-VRC软件:龙门架外部设备添加以及示教编程与仿真运行


![[数据结构]:顺序表(C语言实现)](https://img-blog.csdnimg.cn/028a1c9129b04d269c222eacbda96544.png)
![[python]win10安装gym](https://img-blog.csdnimg.cn/fba4761327f74caa9bcbbacdf828f22f.png)