一、理解BN必备的前置知识(BN, LN等一系列Normalization方法的动机)
Feature Scaling(特征归一化/Normalization):通俗易懂理解特征归一化对梯度下降算法的重要性
总结一下得出的结论:
(以下举的例子是针对channel这个维度数据的分布,其余维度同理。值得注意的是:一个minibatch的图像在神经网络中的每一层输出的特征数据都是多维的:N×HW×C,所以任何一个维度都可以进行Normalization)
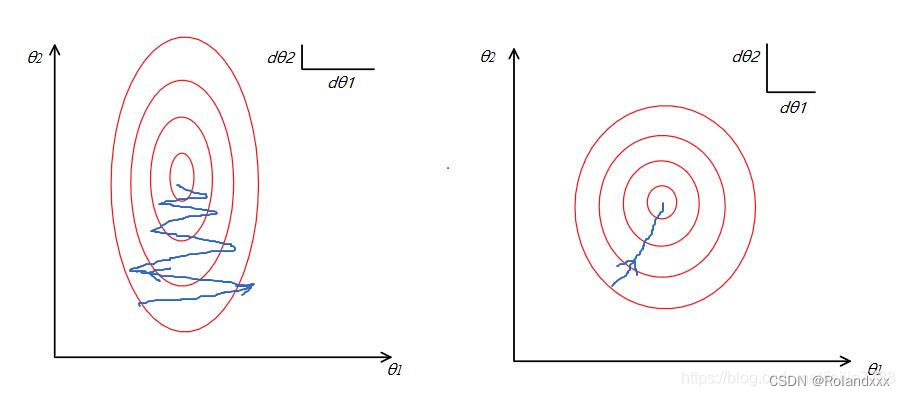
特征未归一化前,优化目标(loss)的等值图由于参数(对应下文的θ1和θ2)取值范围的不同成狭长的椭圆形(想象成空间中的一个碗,碗口的形状是椭圆形,梯度下降是想到达碗底)。为什么参数的取值范围会不同呢?比如有x1和x2两个特征,分别对应的参数是θ1和θ2,输出的特征就是y = θ1×x1+θ2×x2, 我们可以把x1和x2看成在特征图某个像素位置的两个channel,分别被2个卷积核作用的卷积区域内的特征,且x1特征的取值范围如[0,1000]远大于x2的取值范围如[0,10],假设x1和x2对因变量y的影响相当,那么θ1的取值范围就应该小于θ2。又因为数值更大的feature得到的梯度更大,下图中θ1对应更大数值的feature即x1,θ2对应更小数值的feature即x2,所以θ1走的step很大,θ2走的step很小,由于梯度方向总是垂直于等高线方向,左图走出的曲线是震荡性较大的“之”字形线路。归一化后,优化目标的等值图会变成右图的圆形,这是因为θ1和θ2的取值范围也变得接近了(基于前面x1和x2对因变量y的影响相当的假设)。θ1和θ2维度的下降速度也变得更为一致,这是因为归一化后由于x1和x2这两个feature的数值接近,所以θ1和θ2参数获得的梯度都差不多,容易更快地通过梯度下降找到最优解。
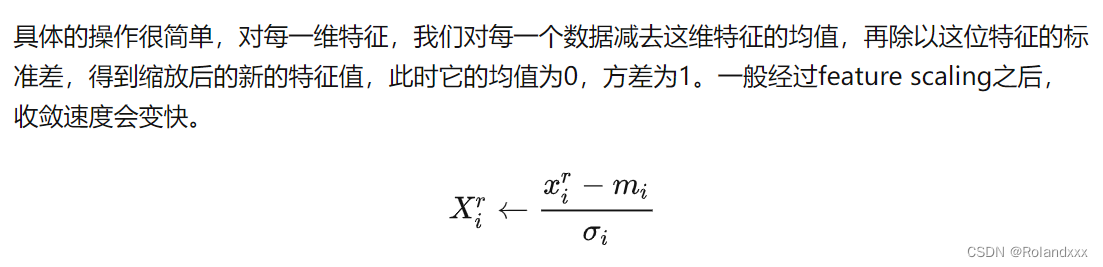
下图即为特征归一化的具体操作:
二、Batch Normalization理解:Batch Normalization的通俗解释
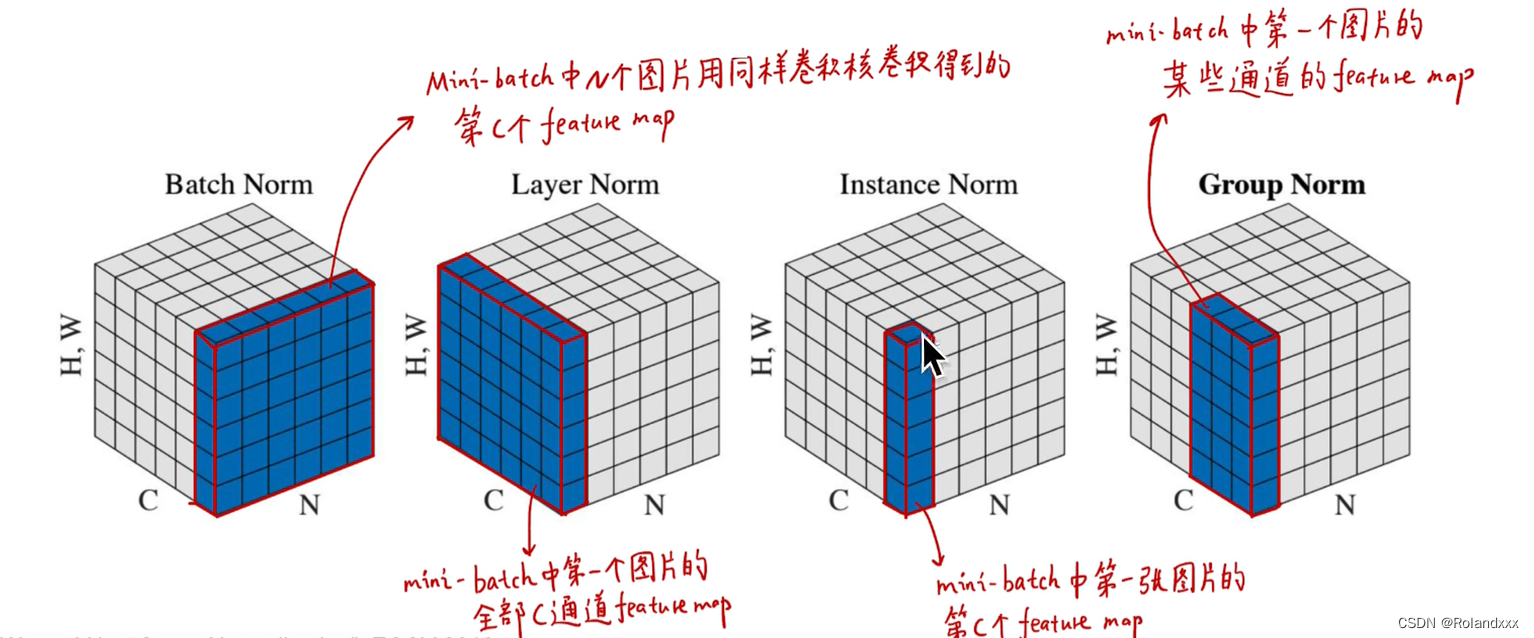
总结:基于第一节讲到的Normalization能为神经网络带来的种种好处,面临的下一个问题就是针对不同的任务,网络每一层的多维的数据在哪个维度进行Normalization是最合适的,于是就有了Batch Normalization(BN) 。在CV中常常使用BN,它是在NHW维度进行了归一化,而Channel维度的信息原封不动,因为可以认为在CV应用场景中,数据在不同channel中的信息很重要,如果对其进行归一化将会损失不同 channel的差异信息。所以总结一下:选择什么样的归一化方式,取决于你关注数据的哪部分信息。如果某个维度信息的差异性很重要,需要被拟合,那就别在那个维度进行归一化。BN针对一个batch内的所有样本的同一通道的元素进行标准化(对哪个维度做Norm,就在其他维度不动的情况下,基于该维度下的所有元素计算均值和方差,然后再做Norm)。
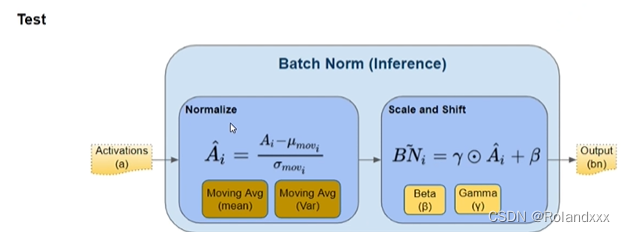
还需注意的是Batch Normalization在训练时和推理时用的参数是不一样的。
训练用的是每个mini-batch训练样本均值和方差,同时还会一直计算Moving Average,Moving Average的初始均值和方差是0和1。
推理用的是所有mini-batches训练样本均值和方差的累计滑动平均结果(Moving Average),推理中的所有参数都是固定住的。

Refer:
Pytorch Batch Normalization 对照原理实践
【炼丹技巧】指数移动平均(EMA)的原理及PyTorch实现
三、其余Normalization
Layer Normalization(批标准化):对一个样本内所有通道的元素进行标准化
Instance Normalization(实例标准化):对一个样本内对每个通道的元素分别进行标准化,即在H*W维度上进行标准化
Group Normalization(组标准化):对一个样本内对几个通道的元素分别进行标准化