使用原因:手眼标定使用halcon的九点标定,但是整体系统是用labview的,机器人得到二维坐标后,需经过halcon算子计算得到机器人坐标系下坐标,在进行运动。
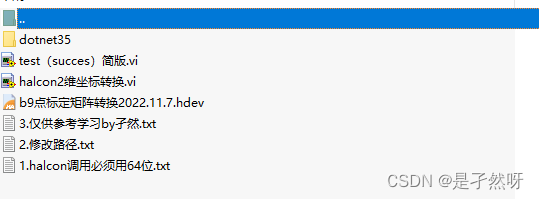
下载路径:
链接:https://pan.baidu.com/s/18FyVMu-Re_EaX2Rlf61OFA
提取码:zi0w
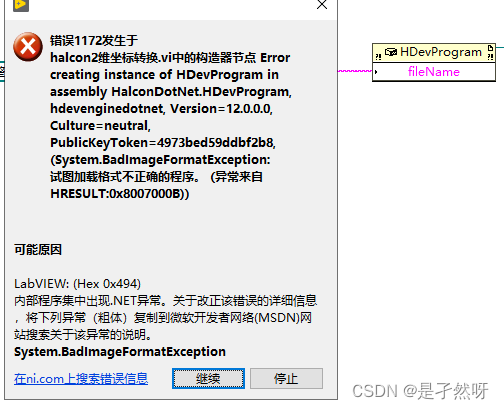
实验发现:需要使用x64(英文版)的labview才不会报错。
x32的labview报错如下图:
详细操作,仅供参考
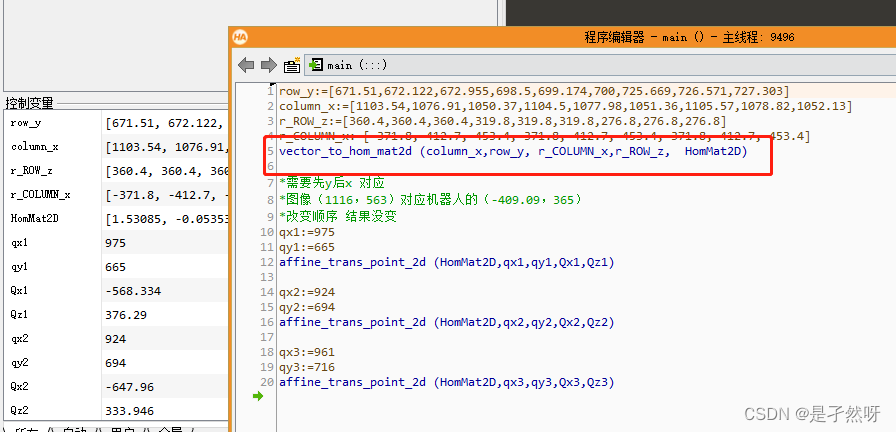
- 1.halcon完成9点标定。记录下此.hedv的路径
- 2.labview调用
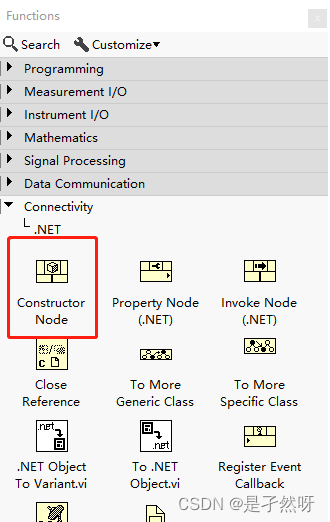
- 2.1 构造器节点
- 2.1.1拖出构造器节点
- 2.1.2进行设置
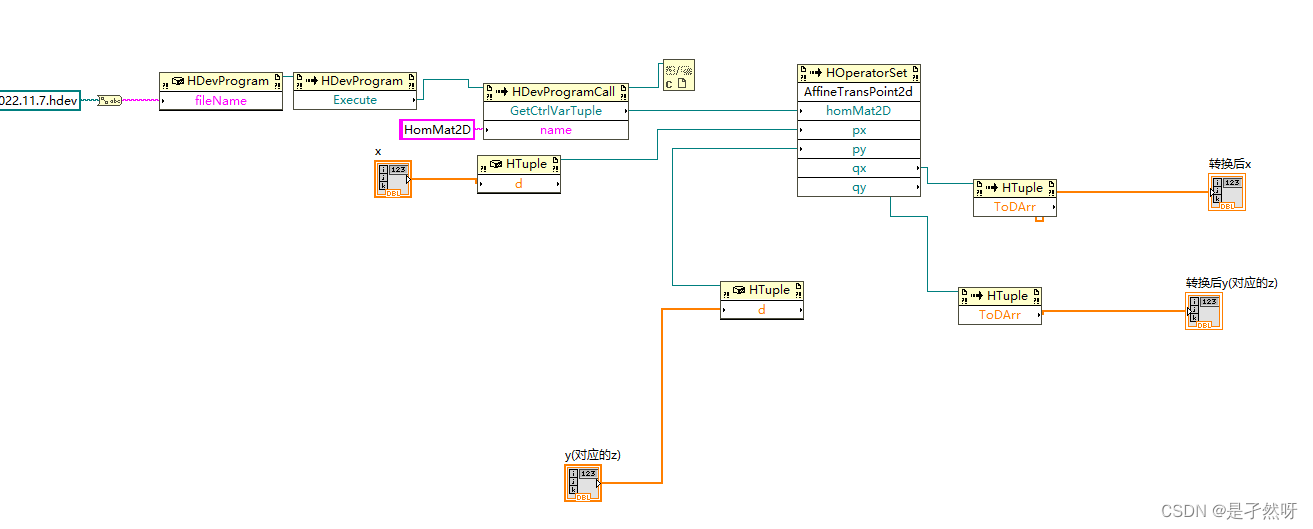
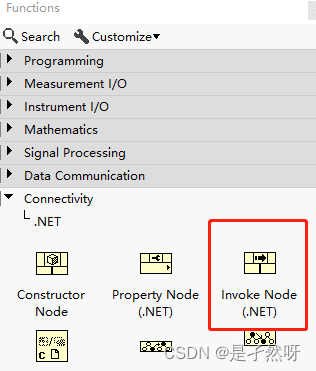
- 2.2 调用节点
- 2.2.1拖出调用节点
- 2.2.2按图连接
- 2.2.3 解释意思
1.halcon完成9点标定。记录下此.hedv的路径
2.labview调用
2.1 构造器节点
2.1.1拖出构造器节点
2.1.2进行设置
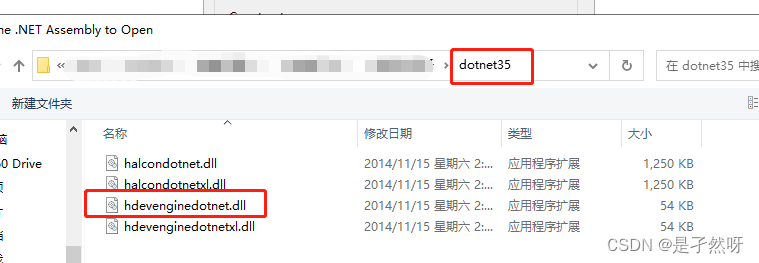
1)点browse… 找到halcon的安装路径下的dotnet35文件夹(可以直接在安装路径搜索)
下的hdevenginedotnet.dll
2)拖到最下面,选中HDevProgram,然后 HD…(String file Name)
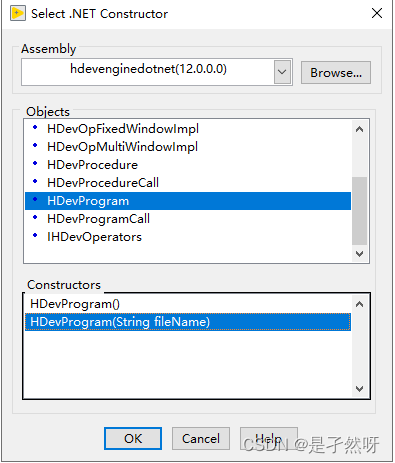
3)就得到这个

2.2 调用节点
2.2.1拖出调用节点
2.2.2按图连接
2.2.3 解释意思
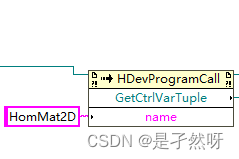
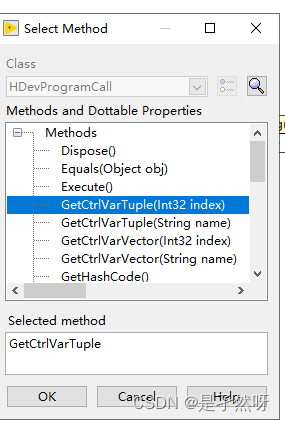
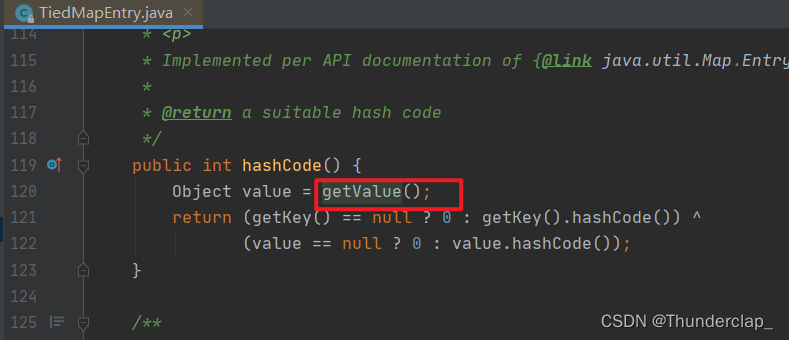
使用Halcon程序中的HomMat2D (可以在第一节 1.halcon完成9点标定。记录下此.hedv的路径 看到红框里)
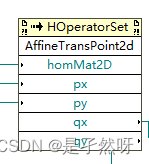
参数对应halcon里的输入和输出。
这个咋弄出来的,去年写的程序,我也不记得了。需要的直接找我或者直接百度云下载吧。