过去一年,服务机器人的发展并不顺利。
头部厂商的变动,市场增长率的持续下降不由得让人质疑,2023年,服务机器人还能“狂飙”吗?
短期的市场波动,并不能代表行业的未来走向,而行业的两面矛盾现象,一面市场增长放缓产品“落地难”一面竞争持续加剧,却直观体现了业内的长久信心。在经济下行的背景下,仅是某个数字的“狂飙”已经不再重要,行业在经历“浮华”之后,“沉下去”是行业也是每个厂商长久生存的关键。这意味着,深耕产品的时代正在到来。
2023,我们需要什么样的服务机器人?
更便宜、更好用是市场需求升级后的直观表达,而深层则是不断拓展的新场景和作业标准的提高对于产品的多样性、智能化、价格等指标提出了新要求。如何快速有效地解决需求变化带来的产品升级问题毫无疑问将是2023年的核心课题。

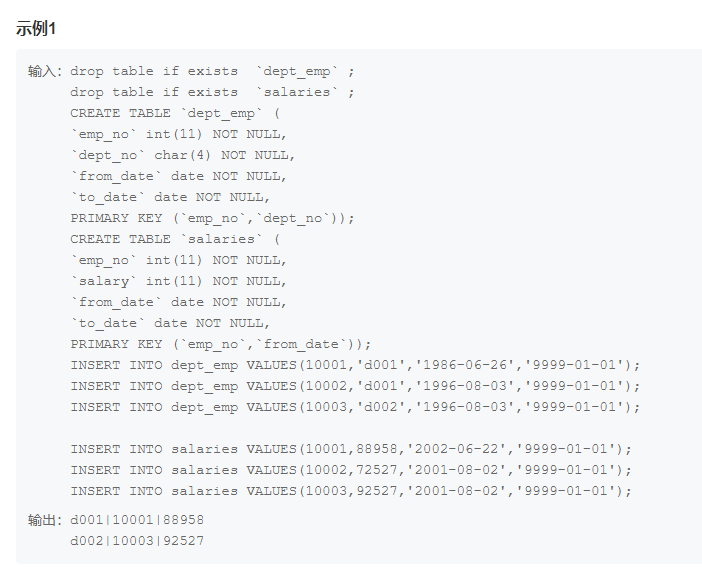
把视角拉回到市场,在爆发之后,服务机器人市场所取得的成绩事实上依然有限。以商用清洁机器人为例,2021年,商用清洁机器人的出货量达上千台,直观来看似乎取得了不错的成绩,但对于整体而言,商用清洁机器人的渗透率仍然很低,替代人工的比率不高,如在商业物业保洁方面,我国拥有300亿平米的物业管理面积,但商用清洁机器人的覆盖率仍不到20%。
造成落地成了老大难的原因无他,产品缺陷。
一方面,目前的机器人价格大多在几万到十几万之间,替代价值不明显,导致终端用户购买意愿不高。根据亿欧数据测算,清洁机器人的替代成本上限约为3.7-6. 3 万元/月;讲解引导机器人的替代成本上限约为0.6-1. 4 万元/月;终端配送机器人的替代成本上限约为0.6-2. 4 万元/月,同时由于实际场景的应用限制,作业效率差距也较大,这会导致替代价值进一步下降。
另一方面,市面上多数商用清洁机器人以洗、扫功能为主,且只能进行空旷场景大面积清扫,在死角清洁、地面护理方面不能完全替代人力;配送和导览机器人有着强交互上的特点,但智能化的不足,让这两类机器人的实际体验大打折扣,如餐厅配送机器人主要通过屏幕控制机器人,较为不便,通过语音对机器人下达命令将成为新的需求点。其次导览机器人虽然应用场景广泛,但相比可替代产品,导览机器人可自主移动和语音对话的优势并不能满足应有场景的主要需求,且相比人工,机器人又不够“智能”致使效率低下。

事实上,目前市面上的大多数服务机器人都是早期验证市场阶段的技术和产品,虽然产品成熟,仍有着多方面问题:
1.安全表现不足,现阶段的服务机器人更有可能实现人力替代的场景需呈现平坦宽阔、人流量稀少的特征;
2.机器人无法自动适应环境变化,部署使用成本高,除了首次部署需要技术人员参与外,商场、超市、交通枢纽、写字楼等场景经常会有局部的底面布局的改变,而每次地面布局的改变都需要联系机器人厂商安排技术人员到场对机器人重新建图并规划路线,大大增加使用成本;
3.缺乏语义识别能力,以商用清洁机器人为例,不同场景下的低敏材质不同,如写字楼大厅和酒店大堂为大理石地面,但写字楼休息区、酒店楼层过道是地毯,但多数商用清洁机器人只能清洁硬质地面,且作业过程无法根据材质进行清扫强度调整,导致刮花地板等情况;
4.不具备智能梯控功能,无法自主多楼层作业。
“价格”和“功能表现”这两座难以翻越的大山,加之经济下行,终端用户的下单行为更加理性和谨慎,让落地难成了长久难题。
产品问题本质是技术问题
想要解决机器人的自身“基因”缺陷,还要回到技术中去。近10年来,激光雷达路线无疑是主流导航方案,但随着对激光雷达技术的不断开发,已经渐渐触及了技术天花板,它本身的技术缺陷在随着时间越发凸显,低成本单线程激光雷达信息获取量低,多线程激光雷达对于需要”降本增效”的机器人而言,其成本本身就是一种劣势。探索新的机器人导航技术一时间成为了整个行业的共同痛点。而在这个过程中,视觉技术所展现出技术潜力,让业内看到了下一代机器人导航技术的开发方向。

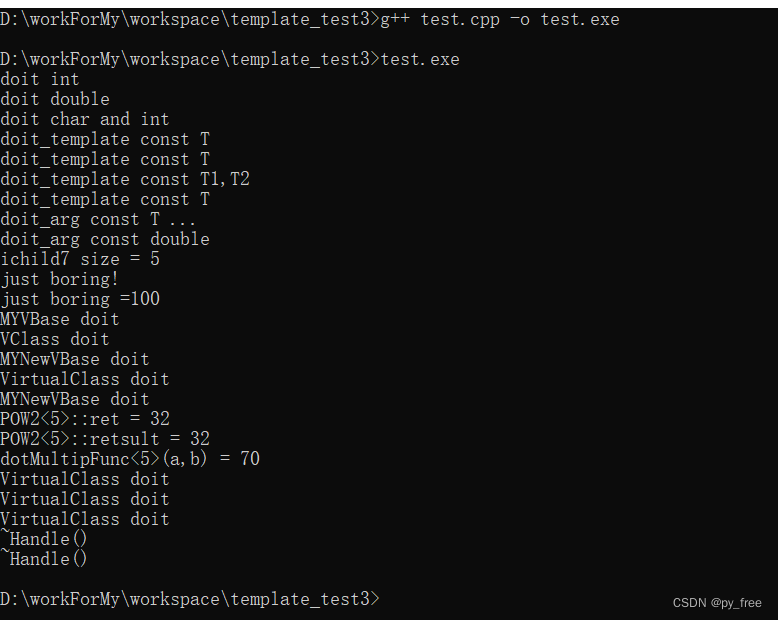
INDEMIND商用机器人AI Kit产品架构图
INDEMIND专注视觉技术研发多年,逐渐走出了一条新路线,并推出了以双目视觉为核心的商用机器人AI Kit商用机器人导航方案。据了解,该方案是以INDEMIND自研的OS Fusion AGI系统为基础,采用以双目立体相机为核心的多传感器融合架构,支持市面上不同品类的主流传感器,满足商用机器人导航定位、智能避障、路径规划、决策交互等核心功能的开发,能够广泛应用于商用清洁、酒店配送、送餐、巡检等商用服务机器人平台。
INDEMIND OS是一套专为机器人及泛机器人智能产品赋能AI能力的AGI系统,基于领先的立体视觉技术,集成了导航定位、图像识别、路径规划及智能决策等核心技术,兼容市面主流平台,为机器人提供完整、可靠的传感器数据处理、AI算法融合及业务逻辑执行能力。INDEMIND OS Lite主要应用于家用机器人,可适配纯视觉传感器架构机器人,兼容多种低成本平台,满足家用扫拖机器人、玩具机器人、教育机器人、看护机器人等开发需求。
值得关注的是,INDEMIND商用机器人AI Kit基于以视觉传感器为核心的融合导航方案以及INDEMIND OS Fusion系统优势,机器人开发成本最低可以下探到2千元以内,包含导航和电池的完整底盘成本则可以下探到5千元以内,明显降低了机器人的开发成本和周期。
据介绍,为了提升功能表现,INDEMIND用几年时间专门研发了智能决策引擎技术,结合基于立体视觉技术带来的强大感知&认知能力,能实现智能避障、自主地图更新、主动安全、智能作业、自然交互、智能梯控等多种关键功能,补足了现有机器人的智能化短板。
此外,在应用部署方面,INDEMIND对商业场景做到了全兼容,目前已经部署过全球上千种不同商业场景,无需进行场景分类,同时,搭载「INDEMIND商用机器人AI Kit」的产品,无需预部署,开箱即用,不依赖线下支持团队,偏远地区可以完全依靠网络销售。
2023,将是“沉下去”做产品的一年,互联网式的“烧钱”打法已然成为过去。