目录
数据结构
解码算法
解码效果
这篇文章基于上两篇文章继续,
佳能镜头EOS系统EF协议逆向工程(一)转接环电路设计_佳能ef自动对焦协议_岬淢箫声的博客-CSDN博客本文属于专栏——工业相机。此专栏首先提供我人工翻译的法语文档部分,然后通过STM32F103C8T6控制佳能镜头,最后协同上位机或者NVIDIA Xavier实现自动对焦。还有一个用处不大的River文档,它知道如何让相机和镜头通信,也许对当前的摄影实践几乎没有帮助。尽管如此,一些应用程序可能需要独立订购物镜的主要功能。撇开工业世界及其特殊机器不谈,在另一个品牌的图像采集系统上安装佳能光学元件是不可能的,而且是有罪的,无论是出于经济原因还是纯粹的技术原因,获得的组合提供了其他不可用的功能。https://blog.csdn.net/caoshiying/article/details/127609884?spm=1001.2014.3001.5502佳能镜头EOS系统EF协议逆向工程(二)逻辑分析仪测试_岬淢箫声的博客-CSDN博客本章描述了用于解密EF协议函数的思想和分析,如果其读数是可选的,则所获得结果的摘要将在专用章节中进行汇编,这仍然是正确理解EF协议函数的必要来源。随着函数的测试和逐步解码,它们的描述和列表中使用的注释将在过程中变得越来越精确,因为以前的分析或推理错误不会被强制纠正。所使用的逻辑分析仪是一个小型号的低成本8输入TTL USBEE AX Pro,所使用的软件是制造商的标准套件,可免费下载。软件不允许编辑或删除部分结果,某些读数或时钟意外激活,因为通电会导致SPI字解码不同步。
https://blog.csdn.net/caoshiying/article/details/129057004?spm=1001.2014.3001.5502
数据结构
逻辑分析仪没有特别要求,某宝上的大部分逻辑分析仪可以用。数据格式要求很简单,举便如下:
; CSV, generated by libsigrok4DSL 0.2.0 on Fri Jul 29 10:17:48 2022
; Channels (3/16)
; Sample rate: 10 MHz
; Sample count: 50.896 M Samples
Time(s), CLK, DLC, DCL
0,1,1,1
0.0498275,1,1,0
0.0498285,1,1,1
0.0498697,1,1,0
0.049876,1,1,1
0.0499793,1,1,0
0.0499986,0,1,0
0.050005,1,1,0分号开头表示注释,第一列是时间,这个时间是相对开始捕获的时间,用单词elapse表示列标题更合适。这款逻辑分析仪软件导出数据的表头就是这么写的,无所谓了。第二列是CLK信号,CLK是时钟的简写,搞硬件的同学是不是很熟悉呢?第三列是DLC信号。DLC是Data Lens to Camera的首字母缩写。第四列是DCL,DCL是Data Camera to Lens首字母缩写。所有信号用1表示高电平,0表示低电平。佳能相机的电平为3.3V。
我使用Qt写的解码工具,CMake工程代码如下:
cmake_minimum_required(VERSION 3.20)
project(TAMRON VERSION 1.0)
find_package(Qt5 COMPONENTS Widgets REQUIRED PATHS $ENV{Qt515_DIR})
link_libraries(Qt5::Widgets)
add_link_options(/SUBSYSTEM:CONSOLE)
file(GLOB TAMRON_SRCS *.cpp *.h *.ui *.qrc *.rc)
add_executable(${PROJECT_NAME} ${TAMRON_SRCS})
target_compile_definitions(${PROJECT_NAME} PRIVATE $<IF:$<CONFIG:DEBUG>,CWDEBUG,CWNDEBUG>)
Qt515_DIR环境变量是必须的。
解码算法
算法是关键是解决ACK干扰。核心思路是寻找U型特征的连续信号。源代码只有一个main.cpp,代码如下:
#include <QApplication>
#include <QMainWindow>
#include <QFileDialog>
#include <QFile>
#include <QMessageBox>
#include <QTextStream>
#include <QDebug>
#include <QFileInfo>
#include <QMetaEnum>
typedef struct _spi_signal_t
{
uint32_t line_no;//行号
double elapse;//消耗的时间,6位小数,单位为秒,存储化为us
bool clk;//时钟是否高位
bool dcl;//主机信号是否高位
bool dlc;//从机信号是否高位
} spi_signal_t;
typedef struct _spi_data_t
{
uint32_t order;//序号
uint32_t start_line;//信号起始行号
uint32_t end_line;//信号结束行号
uint8_t dcl;//主机命令
uint8_t dlc;//从机返回
int frame_no;//字节所属帧号
bool bad;//是否发生丢失bit的情况
double elapse;//消耗的时间
double frequency;//实际通讯频率,存储为KHz
} spi_data_t;
//信号数据中的U型结构,全部为引用指针,不管理内存
typedef struct _u_shape_t
{
spi_signal_t *high_left;//U槽左端
spi_signal_t *low_left;//U槽底左边
spi_signal_t *low_right;//U槽底右边
spi_signal_t *high_right;//U槽右端
spi_signal_t *forward;//遍历前进到达的位置
bool ok;//此U型结构是否能用
int index_cursor;//信号列表遍历时当前的位置
} u_shape_t;
typedef QSharedPointer<spi_signal_t> pspi_signal_t;
typedef QSharedPointer<spi_data_t> pspi_data_t;
typedef QSharedPointer<u_shape_t> pu_shape_t;
#define ZERR_CAPTION u8"系统错误"
#define ZOK_CAPTION u8"系统提示"
//CSV文件文件转换为信号数据
QList<pspi_signal_t> resolve_csv(const QString &zcsv_path);
//信号数据转换为真实的主机与从机之间交换的信息
QList<pspi_data_t> resolve_signal(const QList<pspi_signal_t> &ps);
//保存信息
void save_spi_data(const QString &zcsv_path, const QList<pspi_data_t> &ds);
//寻找信号中的U形,返回下一个U形右端索引+1,返回值index_cursor与istart_cursor相等表示结束,ok为false表示出错
pu_shape_t find_u_shape(const QList<pspi_signal_t> &ps, int istart_cursor, int ilen);
//保存程序日志
void save_log(QtMsgType type, const QMessageLogContext &cxt, const QString &zlog);
//解析帧
void resolve_frame(QList<pspi_data_t> &ds);
//入口函数
int main(int argc, char **argv)
{
qInstallMessageHandler(save_log);
QApplication app(argc, argv);
auto zcsv_path = QFileDialog::getOpenFileName(
nullptr,
u8"选择一个CSV文件",
"D:/tamron"
);
if (zcsv_path.isEmpty())
return 1;
auto ps = resolve_csv(zcsv_path);
if (ps.isEmpty())
return 2;
auto ds = resolve_signal(ps);
if (ds.isEmpty())
return 3;
resolve_frame(ds);
save_spi_data(zcsv_path, ds);
return 0;
}
//CSV文件文件转换为信号数据
QList<pspi_signal_t> resolve_csv(const QString &zcsv_path)
{
QFile f(zcsv_path);
QList<pspi_signal_t> ps;
if (!f.open(QFile::ReadOnly | QFile::Text))
{
QMessageBox::warning(nullptr, ZERR_CAPTION, f.errorString());
return ps;
}
QTextStream ts(&f);
ts.skipWhiteSpace();
//DSView导出数据有5行注释和1行标头,应当跳过。
for (short i = 0; i < 4; i++)
{
auto zline = ts.readLine();
if (ts.atEnd() || !zline.startsWith(";"))
{
QMessageBox::warning(nullptr, ZERR_CAPTION, u8"无效的CSV文件。");
break;
}
}
ts.readLine();
if (ts.atEnd())
return ps;
uint32_t iline = 6;
while (!ts.atEnd())
{
QString zline = ts.readLine();
if (zline.isEmpty())
continue;
QStringList cols = zline.split(u8",");
if (cols.length() < 4)
{
QMessageBox::critical(nullptr, ZERR_CAPTION, QString(u8"第%1行无效数据").arg(iline));
return ps;
}
spi_signal_t r;
r.line_no = iline++;
if (iline >= UINT32_MAX)
{
QMessageBox::warning(nullptr,
ZERR_CAPTION,
u8"input data amount exceed system capacity."
);
break;
}
r.elapse = cols[0].toDouble() * 1000000;
r.clk = cols[1].toInt() != 0;
r.dlc = cols[2].toInt() != 0;
r.dcl = cols[3].toInt() != 0;
pspi_signal_t p = QSharedPointer<spi_signal_t>::create(r);
ps.append(p);
}
qInfo() << u8"合计" << ps.length() << u8"个信号\n";
return ps;
}
//寻找信号中的U形,返回下一个U形右端索引+1,返回值index_cursor与istart_cursor相等表示结束,ok为false表示出错
pu_shape_t find_u_shape(const QList<pspi_signal_t> &ps, int istart_cursor, int ilen)
{
pu_shape_t pu(new u_shape_t
{
0,
});
u_shape_t *u = pu.data();
u->index_cursor = istart_cursor;
//1.寻找U槽
//1.1.寻找下降沿,定位U槽左端
while (u->index_cursor < ilen && ps[u->index_cursor]->clk)
u->index_cursor++;
u->forward = ps[u->index_cursor].data();
if (u->index_cursor - 1 < 0)
{
u->ok = false;
u->index_cursor++;
return pu;
}
if (u->index_cursor + 1 >= ilen)
{
qWarning() << "data end on finding u->high_left and u->low_left";
u->ok = false;
return pu;
}
u->high_left = ps[u->index_cursor - 1].data();
u->low_left = ps[u->index_cursor].data();
u->forward = u->low_left;
#ifdef DEBUG
qInfo() << "u begin: " << u->high_left->line_no;
#endif
u->index_cursor++;
if (u->index_cursor >= ilen)
{
qWarning() << "data end on finding u->low_right";
u->ok = false;
return pu;
}
//1.2.寻找上升沿,定位U槽底有多长
while (u->index_cursor < ilen && !ps[u->index_cursor]->clk)
u->index_cursor++;
u->low_right = ps[u->index_cursor - 1].data();
u->forward = u->low_right;
if (u->index_cursor >= ilen)
{
qWarning() << "data end on finding u->high_right";
u->ok = false;
return pu;
}
//1.3.寻找下降沿,定位U槽右端
//while (u->index_cursor < ilen && ps[u->index_cursor]->clk)
// u->index_cursor++;
u->high_right = ps[u->index_cursor].data();
u->forward = u->high_right;
//1.4.如果U槽的时间跨度大于28us则不是数据传输,暂不处理佳能中的拱门
double fuspan1 = u->high_right->elapse - u->low_right->elapse;
double fuspan2 = u->low_right->elapse - u->low_left->elapse;
if (fuspan1 > 28 || fuspan1 < 0 || fuspan2 > 28 || fuspan2 < 0)
{
qWarning() << "elapse time out: " << fuspan2 << ", " << fuspan1;
u->ok = false;
}
else
u->ok = true;
#ifdef DEBUG
if (u->ok)
qInfo() << "u end: " << u->forward->line_no;
#endif
return pu;
}
//信号数据转换为真实的主机与从机之间交换的信息
QList<pspi_data_t> resolve_signal(const QList<pspi_signal_t> &ps)
{
int icursor = 0;//遍历ps列表的索引
int ilen = ps.length(); //总长度减2,双指针遍历
int iorder = 1;
QList<pspi_data_t> ds;
if (ilen < 17)
{
QMessageBox::critical(nullptr, ZERR_CAPTION, u8"数据量太少。");
return ds;
}
while (icursor < ilen - 17)
{
int ifor_cursor = icursor;
//发现问题则回到U槽右端
int iu_cursor = 0;
pspi_data_t byte(new spi_data_t);
pu_shape_t pu;
byte->order = iorder;
byte->frame_no = 0;
byte->dcl = 0;
byte->dlc = 0;
byte->bad = false;
byte->start_line = 0;
byte->end_line = 0;
byte->elapse = 0;
byte->frequency = 0;
qInfo() << "byte " << iorder << " begin: " << ps[icursor]->line_no;
for (short i = 0; i < 8; i++)
{
pu = find_u_shape(ps, ifor_cursor, ilen);
ifor_cursor = pu->index_cursor;
if (iu_cursor == 0)
iu_cursor = ifor_cursor;
if (pu->ok)
{
#ifdef DEBUG
qInfo() << "byte " << iorder << " bit " << i << " at " << pu->low_left->line_no;
#endif
if (byte->start_line == 0)
{
byte->start_line = pu->low_left->line_no;
byte->elapse = pu->low_left->elapse;
}
if (pu->high_right->dcl)
byte->dcl |= 1 << (7 - i);
if (pu->high_right->dlc)
byte->dlc |= 1 << (7 - i);
}
else
{
byte->bad = true;
break;
}
}
if (byte->bad)
{
icursor = iu_cursor;
qWarning() << "byte " << iorder << " break: " << pu->forward->line_no;
}
else
{
icursor = ifor_cursor;
byte->end_line = pu->forward->line_no;
byte->elapse = pu->forward->elapse - byte->elapse;
byte->frequency = 8000 / byte->elapse;
qInfo() << "byte " << iorder << " end: " << pu->high_right->line_no;
icursor++;
//跳过第9个下降沿
while (ps[icursor]->clk && icursor < ilen)
icursor++;
while (!ps[icursor]->clk && icursor < ilen)
icursor++;
iorder++;
//80KHz下每个bit用时约为13us,1个byte不超过120us
if (byte->elapse > 120)
byte->bad = true;
ds.append(byte);
}
}
return ds;
}
//保存信息
void save_spi_data(const QString &zcsv_path, const QList<pspi_data_t> &ds)
{
//避免多次执行QChar的构造函数和析构函数
static const QChar cfill('0');
QFileInfo fi(zcsv_path);
QString zresolve_path = fi.dir().absoluteFilePath(fi.baseName() + "resolve.csv");
QFile f(zresolve_path);
if (!f.open(QFile::ReadWrite | QFile::Text | QFile::Truncate))
{
QMessageBox::warning(nullptr, ZERR_CAPTION, f.errorString());
return;
}
QTextStream ts(&f);
ts << u8" command,sequence, start, end, dcl, dlc,elapse(us),frequency(KHz),bad\n";
for (const pspi_data_t &d : ds)
{
// char c = ' ';
// if (d->dlc >= 0x20 && d->dlc <= 0x7E && d->dcl == 0)
// c = (char)d->dlc;
// if (c == ',')
// c = ' ';
QString zline = QString("%1,%2,%8,%9, %3, %4,%5,%6,%7\n")
.arg(d->frame_no, 8)
.arg(d->order, 8)
.arg(d->dcl, 2, 16, cfill)
.arg(d->dlc, 2, 16, cfill)
.arg(d->elapse, 10, 'f', 0)
.arg(d->frequency, 14, 'f', 0)
.arg(d->bad, 3)
.arg(d->start_line, 8)
.arg(d->end_line, 8);
// .arg(c, 4);
zline = zline.toUpper();
ts << zline;
}
ts.flush();
f.close();
QMessageBox::information(nullptr, ZOK_CAPTION, u8"数据转换完成。");
qInfo() << u8"数据转换完成。";
}
void save_log(QtMsgType type, const QMessageLogContext &cxt, const QString &zlog)
{
static QFile f;
static QTextStream output(stdout);
static QTextStream ts;
if (!f.isOpen())
{
QDir d(QApplication::applicationDirPath());
f.setFileName(d.absoluteFilePath("main.log"));
if (!f.open(QFile::Append | QFile::Text | QFile::ReadWrite))
{
QMessageBox::warning(nullptr, ZERR_CAPTION, u8"无法打开日志文件。");
return;
}
ts.setDevice(&f);
ts.setAutoDetectUnicode(true);
}
QString ztype;
switch (type)
{
case QtDebugMsg:
ztype = u8"DEBG";
break;
case QtWarningMsg:
ztype = u8"WARN";
break;
case QtCriticalMsg:
ztype = u8"CRIT";
break;
case QtFatalMsg:
ztype = u8"FATA";
break;
case QtInfoMsg:
ztype = u8"INFO";
break;
default:
Q_ASSERT(false);
break;
}
ts << ztype << ", " << zlog.toUtf8() << "\n";
ts.flush();
output << ztype << " " << zlog.toUtf8() << "\n";
output.flush();
}
//解析帧
void resolve_frame(QList<pspi_data_t> &ds)
{
if (ds.length() < 2)
return;
int ilen = ds.length();
int iframe = 0;
for (int i = 0; i < ilen; i++)
{
if (ds[i]->dcl > 0)
iframe++;
ds[i]->frame_no = iframe;
}
}解码效果
如下图所示
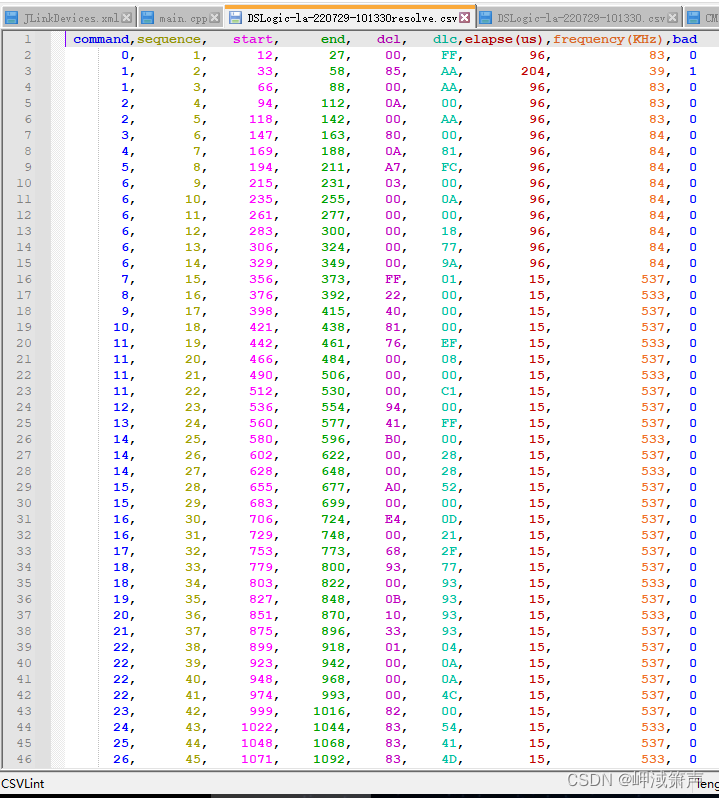
解码结果中通信频率、0A与AA应答信号、0x06与0x05的转动信号与实际匹配,说明解码成功。如果想要更多的通信规律,请与我私聊。下一篇讲解常见的指令。








![[Apache Hudi] 流转批的场景实践](https://img-blog.csdnimg.cn/bc3c2649a1b949a9a665b3888c13de50.png)