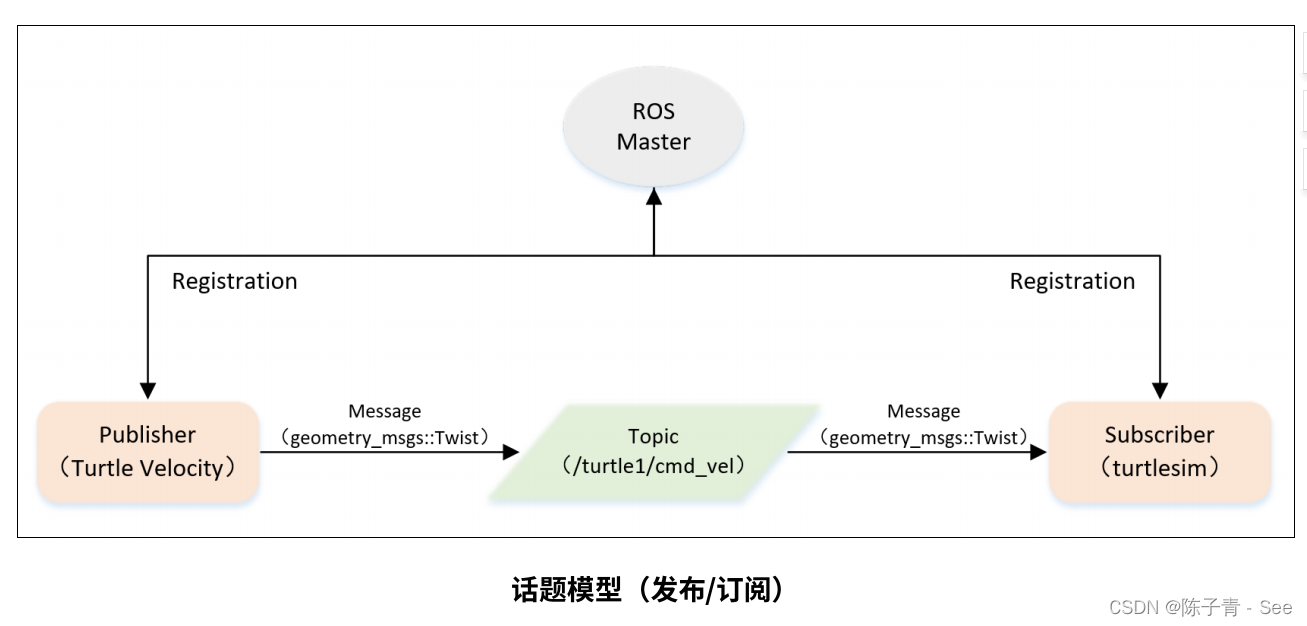
发布者
以小海龟的话题消息为例,编程实现发布者通过/turtle1/cmd_vel 话题向 turtlesim节点发送消息,流程如图
步骤一 创建功能包(工作空间为~/catkin_ws/src)
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
步骤二 编写C++代码,如下
#include<ros/ros.h>
#include<geometry_msgs/Twist.h>
int main(int argc, char*argv[])
{
/* 初始化ros节点 */
ros::init(argc,argv,"velovity_publisher");
//创建节点句柄
ros::NodeHandle n;
//创建一个Publisher,发布名为turtle1/cmd_vel 的topic,消息类型为 geometry_msgs ::Twist.h 队列长度为10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("turtle1/cmd_vel",10);
ros::Rate loop_rate(10);
while(ros::ok())
{
//初始化消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
//发布消息
turtle_vel_pub.publish(vel_msg);
//打印日志
ROS_INFO("velocity_publisher : msg [%0.2f m/s,%0.2f rad/s]",vel_msg.linear.x,vel_msg.angular.z);
loop_rate.sleep();
}
return 0;
}
补充项:使用vscode编写C++代码,ROS的头文件引用问题
解决方案如下:
打开您的VS Code项目或工作空间。
在菜单栏中,选择“查看”(View) -> “命令面板”(Command Palette)。
在搜索框中输入“C++: Edit Configuration”,并选择“C++: Edit Configurations (UI)”选项。
在这个UI界面中,您需要添加以下两个路径:
在“编译”(Compile)标签页下,选择“高级”(Advanced)选项。
在“includePath”中添加ROS的include文件夹的路径,如
/opt/ros/<ROS_VERSION>/include。在“browse.path”中添加ROS的lib文件夹的路径,如
/opt/ros/<ROS_VERSION>/lib。单击“确定”(OK)保存您的更改。
步骤三 配置CMakeLists.txt
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
步骤四 编译运行
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ roscore
$ rosrun turtlesim turtlesim_node
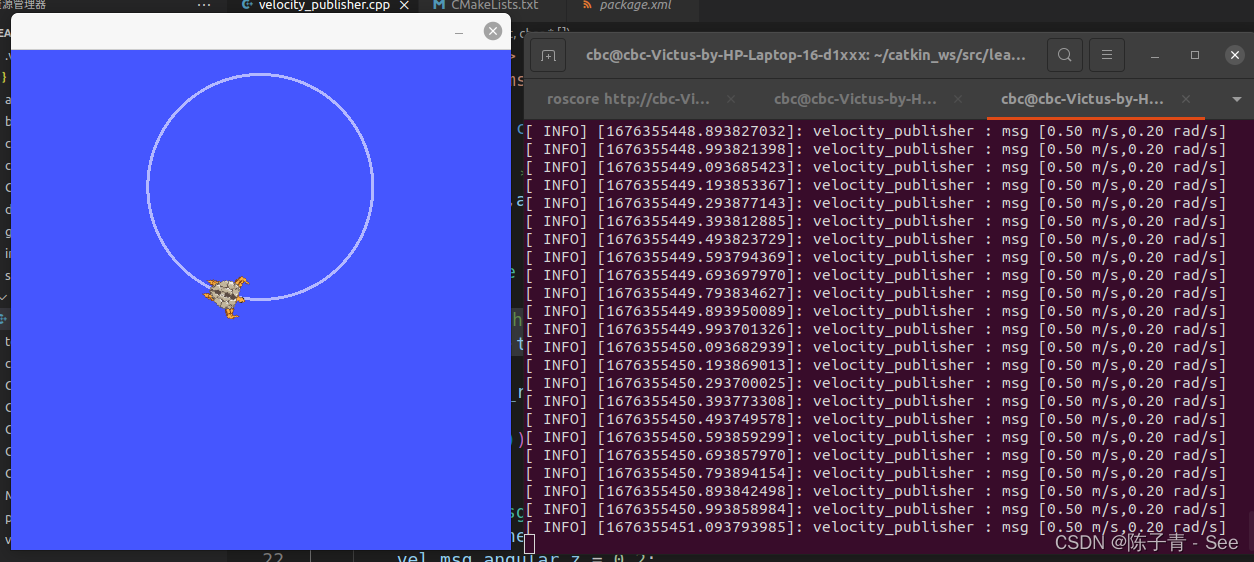
$ rosrun learning_topic velocity_publisher
此时,小海龟接受到消息作圆周运动。
订阅者
订阅者编译与运行方式同上,以订阅/turtle1/pose topic 获取小海龟坐标为例,代码如下
#include<ros/ros.h>
#include"turtlesim/Pose.h"
void poseCallback(const turtlesim::Pose::ConstPtr &msg)
{
ROS_INFO("pose:x %0.6f, y %0.6f",msg->x,msg->y);
}
int main(int argc, char *argv[])
{
/* code */
//初始化ros节点
ros::init(argc,argv,"pose_subscriber");
//创建节点句柄
ros::NodeHandle n;
//创建一个订阅者,订阅名为 /turtle1/pose 的 topic
ros::Subscriber pose_sub =n.subscribe("/turtle1/pose",10,poseCallback);
//阻塞
ros::spin();
return 0;
}
附录:roscpp C++官方文档 roscpp: roscpp
rospy Python官网文档 http://docs.ros.org/en/melodic/api/rospy/html/
python对应写法
发布者
# 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
import rospy
from geometry_msgs.msg import Twist
def velocity_publisher():
# ROS节点初始化
rospy.init_node('velocity_publisher', anonymous=True)
# 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化geometry_msgs::Twist类型的消息
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
# 发布消息
turtle_vel_pub.publish(vel_msg)
rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass订阅者
# 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
import rospy
from turtlesim.msg import Pose
def poseCallback(msg):
rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)
def pose_subscriber():
# ROS节点初始化
rospy.init_node('pose_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
rospy.Subscriber("/turtle1/pose", Pose, poseCallback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
pose_subscriber()





![[CVPR‘22] EG3D: Efficient Geometry-aware 3D Generative Adversarial Networks](https://img-blog.csdnimg.cn/1d57395630814531971c1b44b12e7aee.png)
![GDI+绘图轻松入门[6]-路径变形和表盘的绘制](https://img-blog.csdnimg.cn/ea33b5ce2d7844ef8cc3668e73bcc751.png)