1 基本概念
位平面分解的核心思想是将图像的每一个像素分解为多个二进制位,分别存储在不同的位平面上。例如,如果一个图像是8位深度的,则可以分解为8个位平面,每个位平面上存储一个二进制位。
位平面分解在图像压缩中有着重要的应用,因为它可以有效减少图像的存储大小。例如,如果一个图像的最高位平面(即最高二进制位)存储的是图像的主要信息,那么将其单独存储可以大大减小图像的大小。
此外,位平面分解技术的应用非常广泛,除了压缩技术以外,在数字水印、和特征提取等方面都有重要的应用。通过对每个位平面进行单独处理,可以更加精细地处理图像信息,提高图像处理的效率和精度。
1.1 位平面分解流程:
- 读入灰度图像并将其转换为二进制形式,即将每个像素点的灰度值表示成8位二进制数。
- 对于每个像素点的二进制数,将它们按位拆分为8个二进制数,每个数表示一个位平面。
- 对于每个位平面,将其转换为0或255的二值图像。具体方法是将每个像素点的该位的二进制数值提取出来,然后将该值赋为0或255。这样就可以得到8个二值图像,每个图像表示了原图像中某一位上的信息。
- 保存每个位平面的二值图像,以便后续使用。
1.2 位平面分解算法原理
假设原图像为 I ( x , y ) I(x,y) I(x,y),灰度级为 g ( x , y ) g(x,y) g(x,y),每个像素点的灰度值可以表示成一个8位的二进制数,即 g ( x , y ) = b 7 2 7 + b 6 2 6 + b 5 2 5 + b 4 2 4 + b 3 2 3 + b 2 2 2 + b 1 2 1 + b 0 g(x,y) = b_7 2^7 + b_6 2^6 + b_5 2^5 + b_4 2^4 + b_3 2^3 + b_2 2^2 + b_1 2^1 + b_0 g(x,y)=b727+b626+b525+b424+b323+b222+b121+b0,其中 b 7 b_7 b7 到 b 0 b_0 b0 分别表示第7位到第0位的二进制值,取值为0或1。
对于第 i i i 个位平面,可以通过如下公式将其转换为0或255的二值图像 P i ( x , y ) P_i(x,y) Pi(x,y):
P
i
(
x
,
y
)
=
{
255
if
b
i
=
1
0
if
b
i
=
0
P_i(x,y) = \begin{cases} 255 & \text{if } b_i = 1 \\ 0 & \text{if } b_i = 0 \end{cases}
Pi(x,y)={2550if bi=1if bi=0
这里
b
i
b_i
bi 表示
g
(
x
,
y
)
g(x,y)
g(x,y) 的第
i
i
i 位二进制值。
因此,可以将原图像 I ( x , y ) I(x,y) I(x,y) 的每个像素点的二进制值拆分成8个位平面,得到8个二值图像 P 0 ( x , y ) , P 1 ( x , y ) , ⋯ , P 7 ( x , y ) P_0(x,y), P_1(x,y), \cdots, P_7(x,y) P0(x,y),P1(x,y),⋯,P7(x,y),它们表示了原图像中的信息在每个二进制位上的分布情况。
举个例子,当我们的原始数据像素数据为:
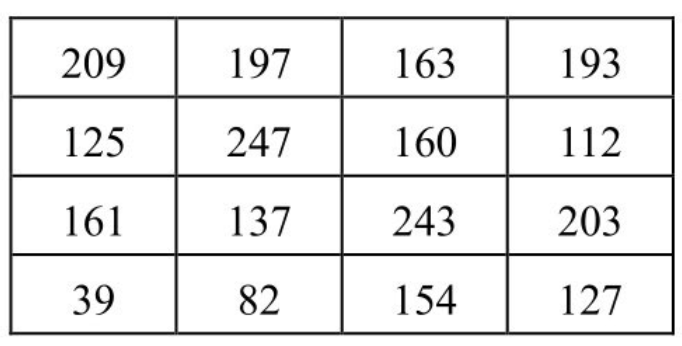
则首先将其格式转为二进制:
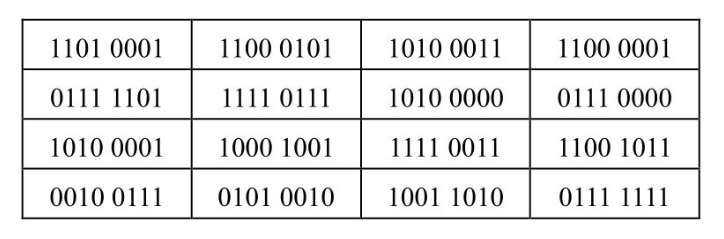
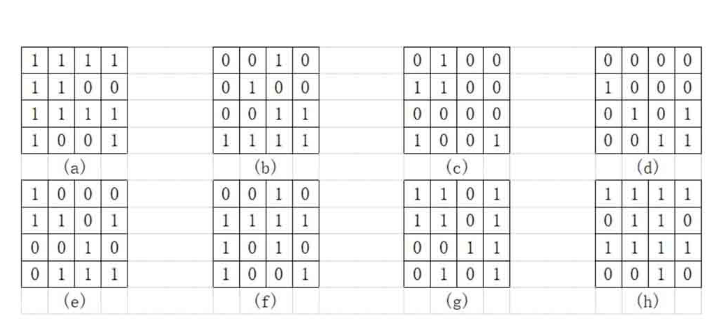
之后将二进制的各位分别取出,就形成了分解后的位平面:
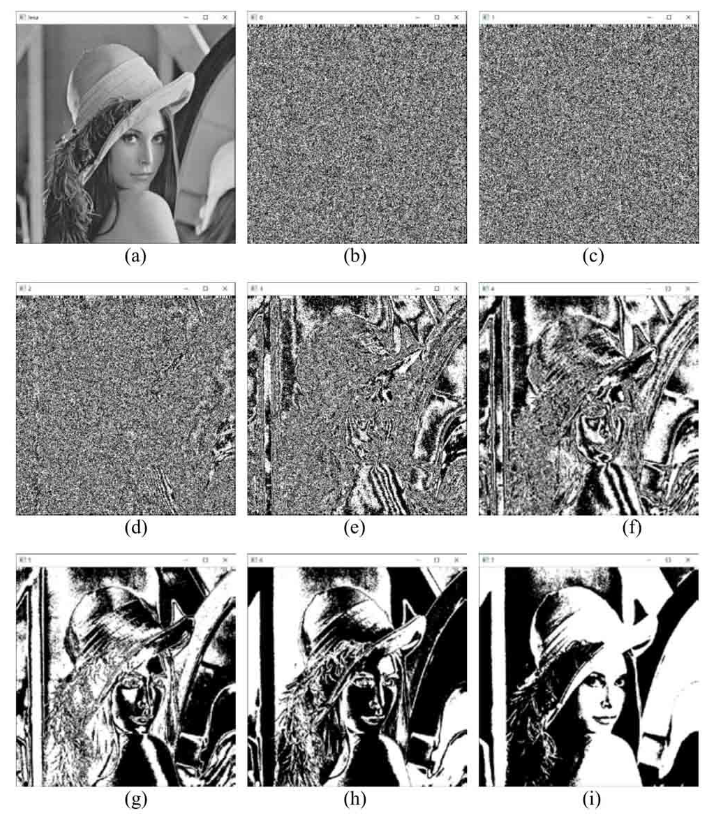
2 位平面分解的Python实现
- 使用OpenCV的
imread函数读入一幅灰度图像,灰度值范围为0~255,并用imshow函数显示原图像。
import cv2
import numpy as np
# 读入灰度图像并显示
lena = cv2.imread("lenacolor.png", 0)
cv2.imshow("lena", lena)
- 获取图像的尺寸,即行数和列数。
# 获取图像的尺寸
r, c = lena.shape
- 构造表示二进制位的图像,即构造8个大小与原图像大小相同的图像,每个图像上的像素值表示二进制数值的某一位。即 ( 1 , 2 , 4 , . . . , 128 ) (1,2,4,...,128) (1,2,4,...,128)如换算成二进制则为 ( 00000001 , 00000010 , 00000100 , . . . , 10000000 ) (0000 0001,0000 0010,0000 0100,...,1000 0000) (00000001,00000010,00000100,...,10000000)
# 构造表示二进制位的图像
x = np.zeros((r, c, 8), dtype=np.uint8)
for i in range(8):
x[:, :, i] = 2 ** i
print(x)
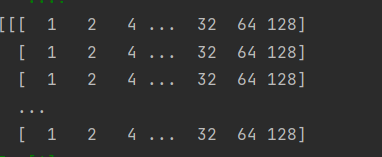
其中x=np.zeros((r, c,8), dtype=np.uint8)语句设置一个用于提取各个位平面的提取矩阵。该矩阵是“r×c×8”大小的,其中r是行高,c是列宽,8表示共有8个通道。矩阵x的8个通道分别用来提取灰度图像的8个位平面。例如,x[:, :,0]用来提取灰度图像的第0个位平面。
- 构造表示每个位平面的图像,即将原图像的每个像素的二进制数值按位拆分,并将对应位平面上的像素值赋为该二进制位的数值,其余像素值为0。并执行二进制维度上的
AND关系。使用OpenCV的位运算 AND 可以直接执行上述操作。与运算的讲解点此查看
# 构造表示每个位平面的图像,并显示
r = np.zeros((r, c, 8), dtype=np.uint8)
for i in range(8):
# 使用位运算 AND 获取当前位平面的二值图像
r[:, :, i] = cv2.bitwise_and(lena, x[:, :, i])
- 将当前位平面的非零像素值赋为255,将该位平面的二值图像转换为0/255的形式。这是因为位平面分解后的图像应为二值图像,而Python在展示是默认为8位像素。因此我们要将二值的0或1转化为8位的0或255。
for i in range(8):
# 使用位运算 AND 获取当前位平面的二值图像
r[:, :, i] = cv2.bitwise_and(lena, x[:, :, i])
print(r)
# 将非零像素值赋为255,将当前位平面的二值图像转换为0/255的形式
mask = r[:, :, i] > 0
r[mask] = 255
- 最后,使用
imshow函数显示当前位平面的二值图像。完整的函数如下:
import cv2
import numpy as np
# 读入灰度图像并显示
lena = cv2.imread("lenacolor.png", 0)
#cv2.imshow("lena", lena)
# 获取图像的尺寸
r, c = lena.shape
# 构造表示二进制位的图像
x = np.zeros((r, c, 8), dtype=np.uint8)
for i in range(8):
x[:, :, i] = 2 ** i
print(x)
# 构造表示每个位平面的图像,并显示
r = np.zeros((r, c, 8), dtype=np.uint8)
for i in range(8):
# 使用位运算 AND 获取当前位平面的二值图像
r[:, :, i] = cv2.bitwise_and(lena, x[:, :, i])
print(r)
# 将非零像素值赋为255,将当前位平面的二值图像转换为0/255的形式
mask = r[:, :, i] > 0
r[mask] = 255
# 显示当前位平面的二值图像
cv2.imshow(str(i), r[:, :, i])
# 等待用户按下任意键,然后关闭所有窗口
cv2.waitKey()
cv2.destroyAllWindows()
最终,图象被分解成了8张二值图像。并且位数越高的二值图像,越能体现出原始图像的特征。






![[小记]注入服务进程/跨session注入](https://img-blog.csdnimg.cn/ccbedd9623f944f4b695d4c1dc5e4de4.png)