文章目录
- 内容概要
- 1 激光雷达原理
- 1.1 什么是激光雷达?
- 1.2 激光雷达原理
- 1.3 激光雷达分类
- 三角法
- TOF法
- 脉冲间隔测量法
- 幅度调制的相位测量法
- 相干法
- 激光雷达用途
- 2 激光雷达安装、标定与同步
- 2.1 激光雷达安装方式
- 考虑因素
- 2.2 激光雷达点云用途
- 2.3 数据融合
- 多激光雷达数据融合
- 多传感器数据融合
- 2.4 激光雷达系统方案
- 硬件部分
- 全方位感知(主雷达+近补雷达)
- 反射强度
- 抗干扰
- 抗多雷达对射干扰
- 抗强光干扰
- 多传感器融合
- 多传感器标定
- 时间同步
- 空间同步
- 软件部分
- 障碍物检测
- 障碍物分类
- 运动物体跟踪
- 可行驶区域检测
- SLAM建图
- 重定位
- 3 激光雷达数据采集
- 4 ROS编程基础
内容概要
1 激光雷达原理
2 激光雷达安装、标定与同步
3 激光雷达数据采集
4 ROS编程基础
1 激光雷达原理
1.1 什么是激光雷达?
LiDAR,Light Detection And Ranging
LADAR,LAser Detection And Ranging

探测和测距系统利用发射出的不同频率的波长,根据其从障碍物上返回所需的时间来绘制一个区域的地图。
LiDAR、Laser Radar以及LADAR系统,都使用光频率来进行这类测量。各系统之间,虽然原理近似,但应用特点和适用领域大有不同。
LiDAR已广泛意义上成为基于光的非接触式测量仪器的统称,但在实践中,LiDAR测量设备在处理“大区域”、“大容量”扫描领域作业中更加适用,系统通常会以网格或锥形的方式发出多束激光,并通过不断运动快速覆盖数百万个点,其精度根据需求,从0.1英寸(2.54毫米)到超过1英尺(304.8毫米)不等。LiDAR测量系统在土地测绘、建筑信息建模和自动驾驶汽车的导航系统中应用较为普遍。
Laser Radar系统,则更接近于:采用非合作靶标进行测量的激光跟踪仪。测量时,Laser Radar系统通常会发出一个单一的、聚焦的激光束来测量几米范围内的特征,精度在微米级别。
LADAR系统,正好集合了LiDAR与Laser Radar系统的优势。LADAR测量系统,如API品牌的9D LADAR,可以在不牺牲精度的前提下,提供更大的测量范围。LADAR系统可在所有Laser Radar适用领域中应用,并提供更佳的测量效率,完美适用于以白车身检测或机身装配等为代表的高端应用环境。
LiDAR系统更多地利用网格或锥状激光束来增加覆盖范围,并在较远的距离以较低的精度收集数据;Laser Radar系统则牺牲了测量速度和效率,以提高单点测量精度;对于制造业中真正高效、流畅运作的自动化近线/在线检测解决方案来讲,LiDAR系统缺乏精度,而Laser Radar则缺乏测量的速度和效率。LADAR系统,则兼容了前两种系统的优势,能够同时保障精度与速度,实现更高效的测量,更加适用于工业自动化生产领域的各测量环节。
参考:LADAR, LiDAR & Laser Radar激光雷达的种类划分与功能对比
1.2 激光雷达原理
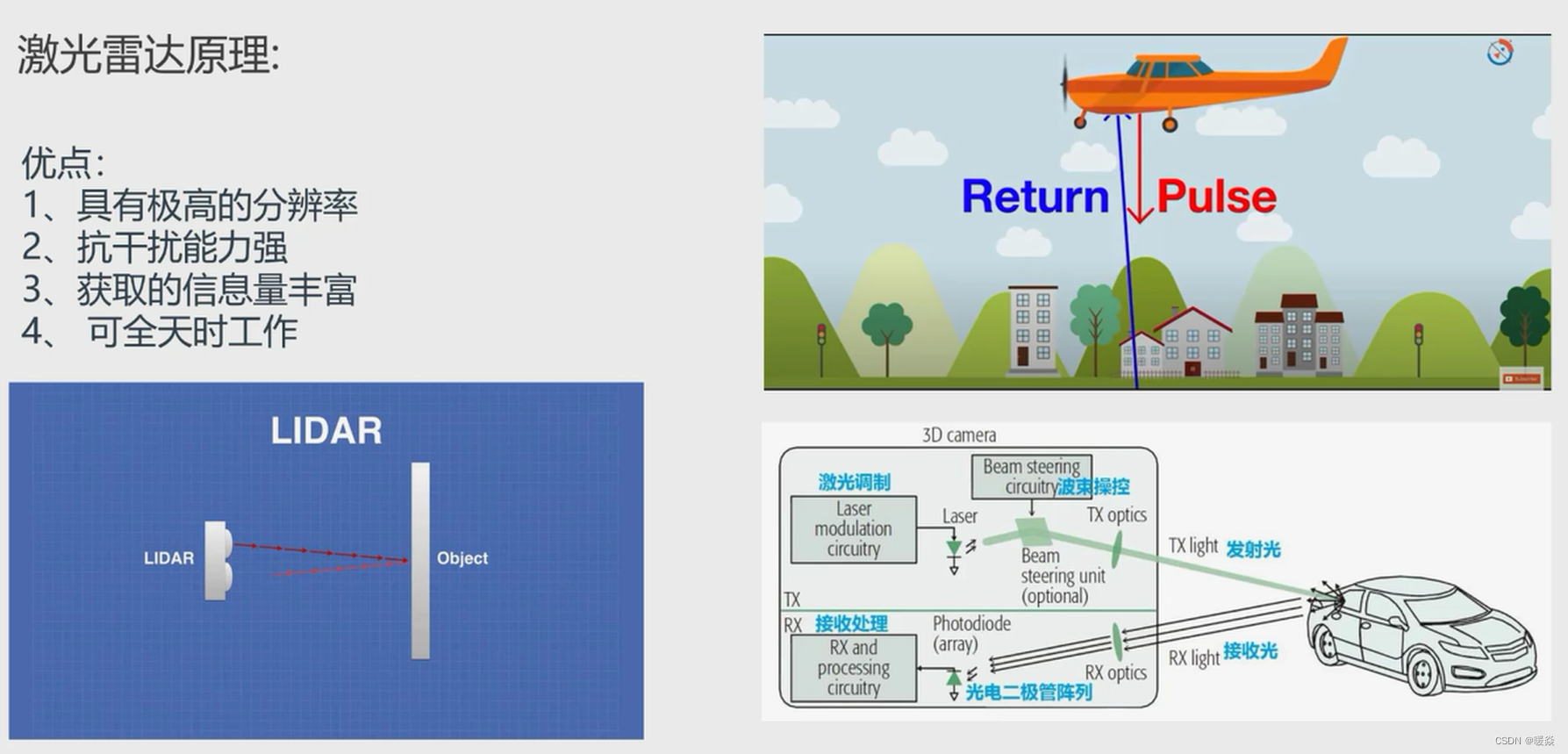
激光雷达优点:
1、具有极高的分辨率
2、抗干扰能力强
3、获取的信息量丰富
4、可全天时工作
激光雷达缺点:
易受环境中可反射激光物质的影响,例如天气(雨天)、灰尘和昆虫等影响。
1.3 激光雷达分类
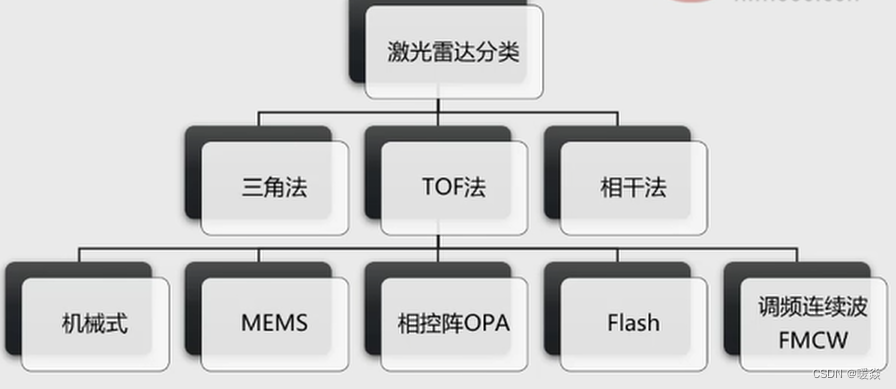
三角法
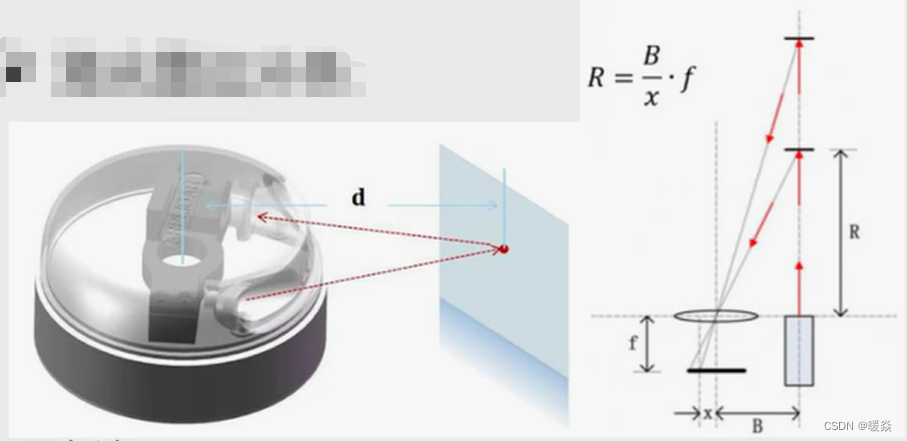
适应于近距离,百微米精度,随着距离的增加,精度会变得更差。
TOF法
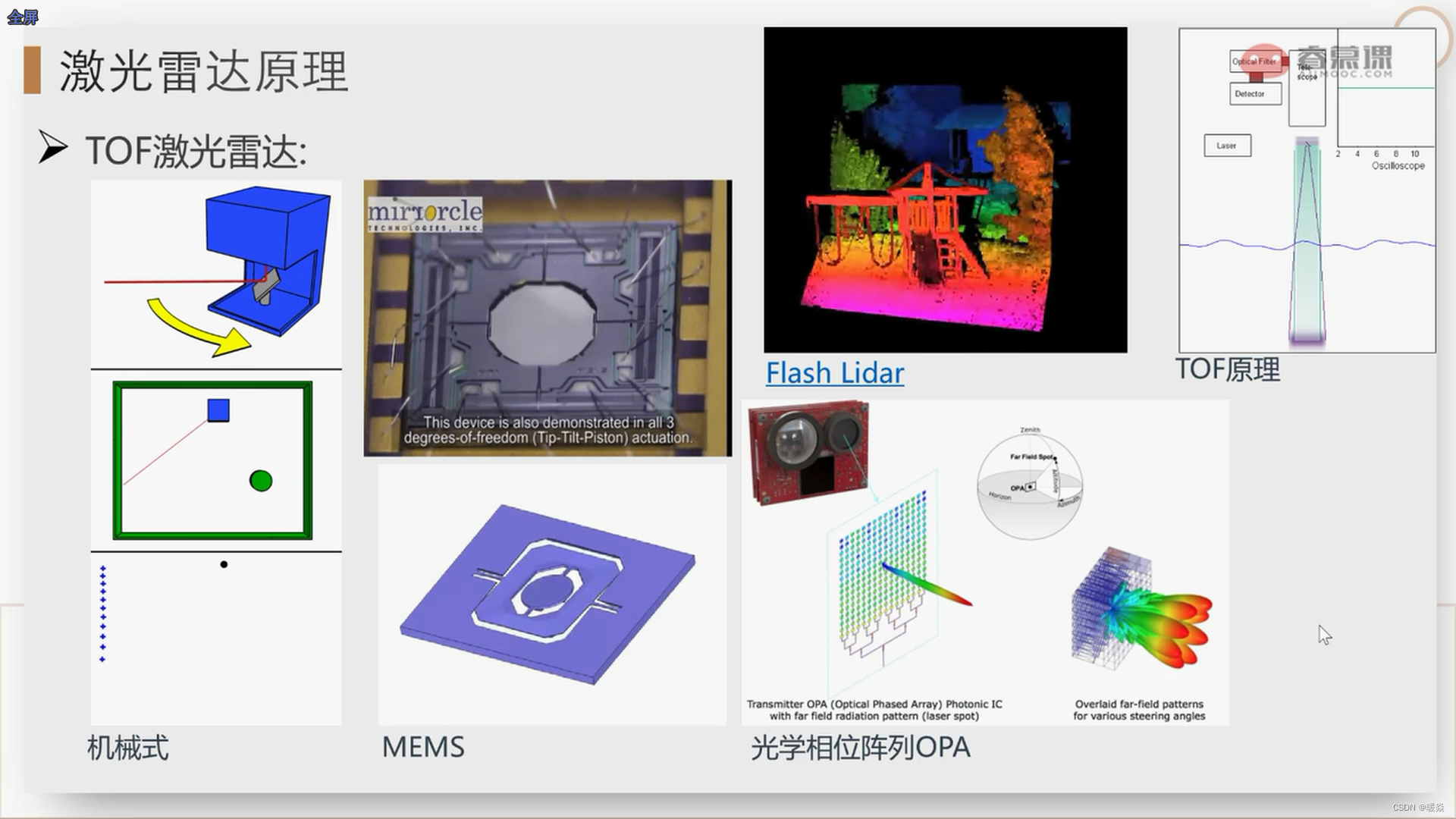
脉冲间隔测量法
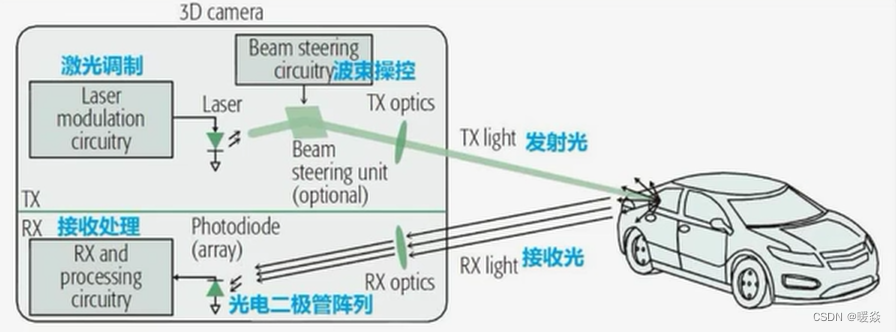
幅度调制的相位测量法
脉冲型TOF法,随着距离的增加所需要测算的精度要更高,发射器件的功率要大,对发射器提出了高要求,所以长距离的高精度是没有办法实现的。
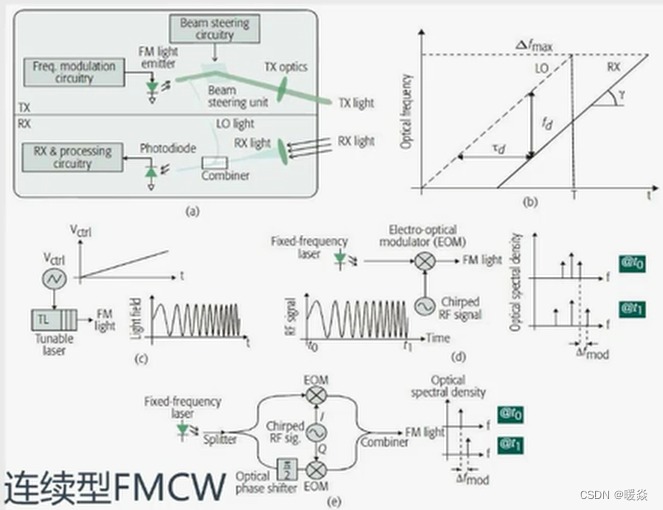
相干法
需要连续时间波长的叠加计算时间和距离,测量速度慢但是精度高,所以一般适用于手持扫描仪器中。

激光雷达用途
autonomous vehicles

agriculture
river survey
modelling of the pollution
archeology and building construction
2 激光雷达安装、标定与同步
2.1 激光雷达安装方式
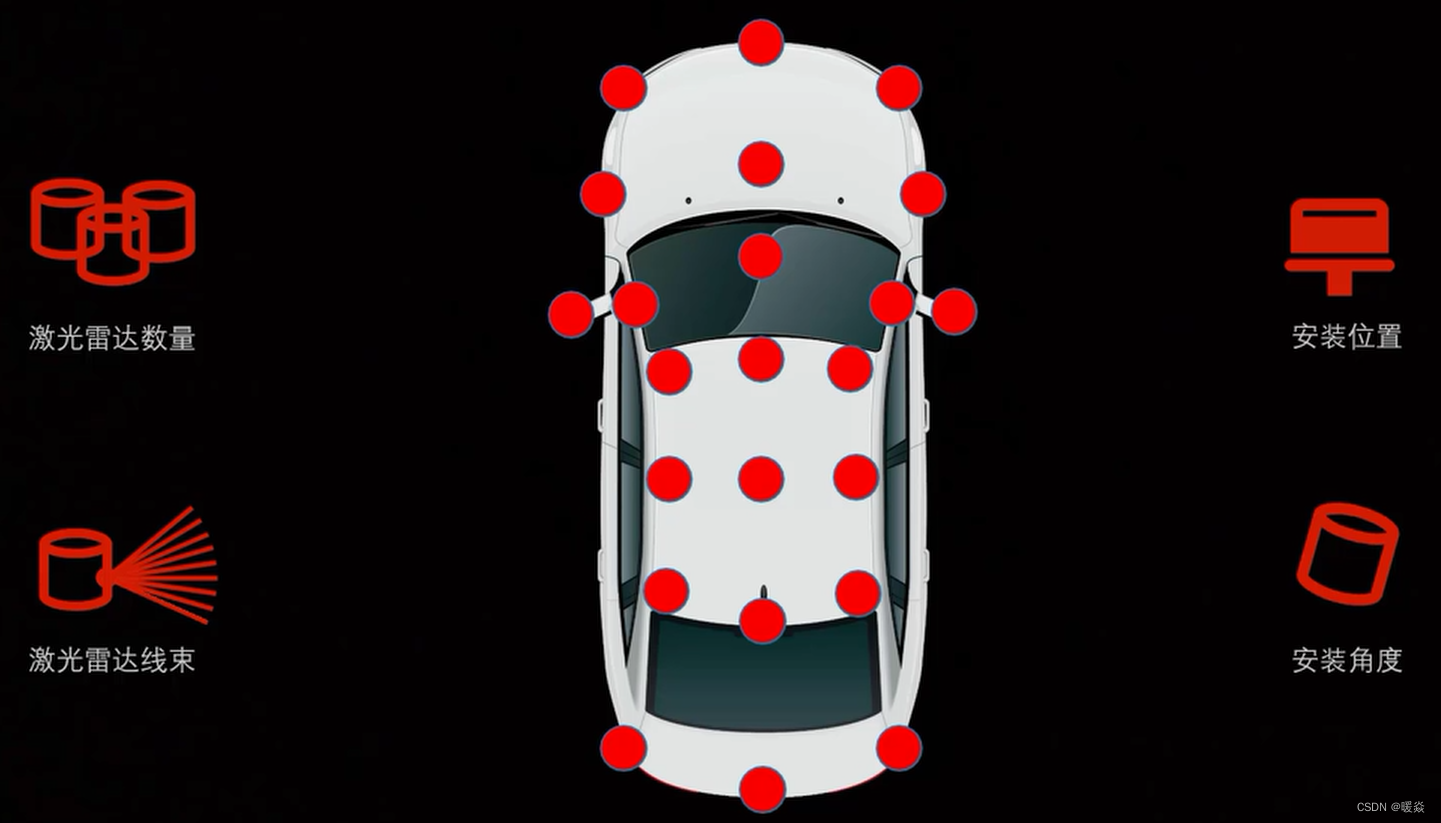
考虑因素
激光雷达数量
激光雷达线束
安装位置
安装角度
2.2 激光雷达点云用途

2.3 数据融合
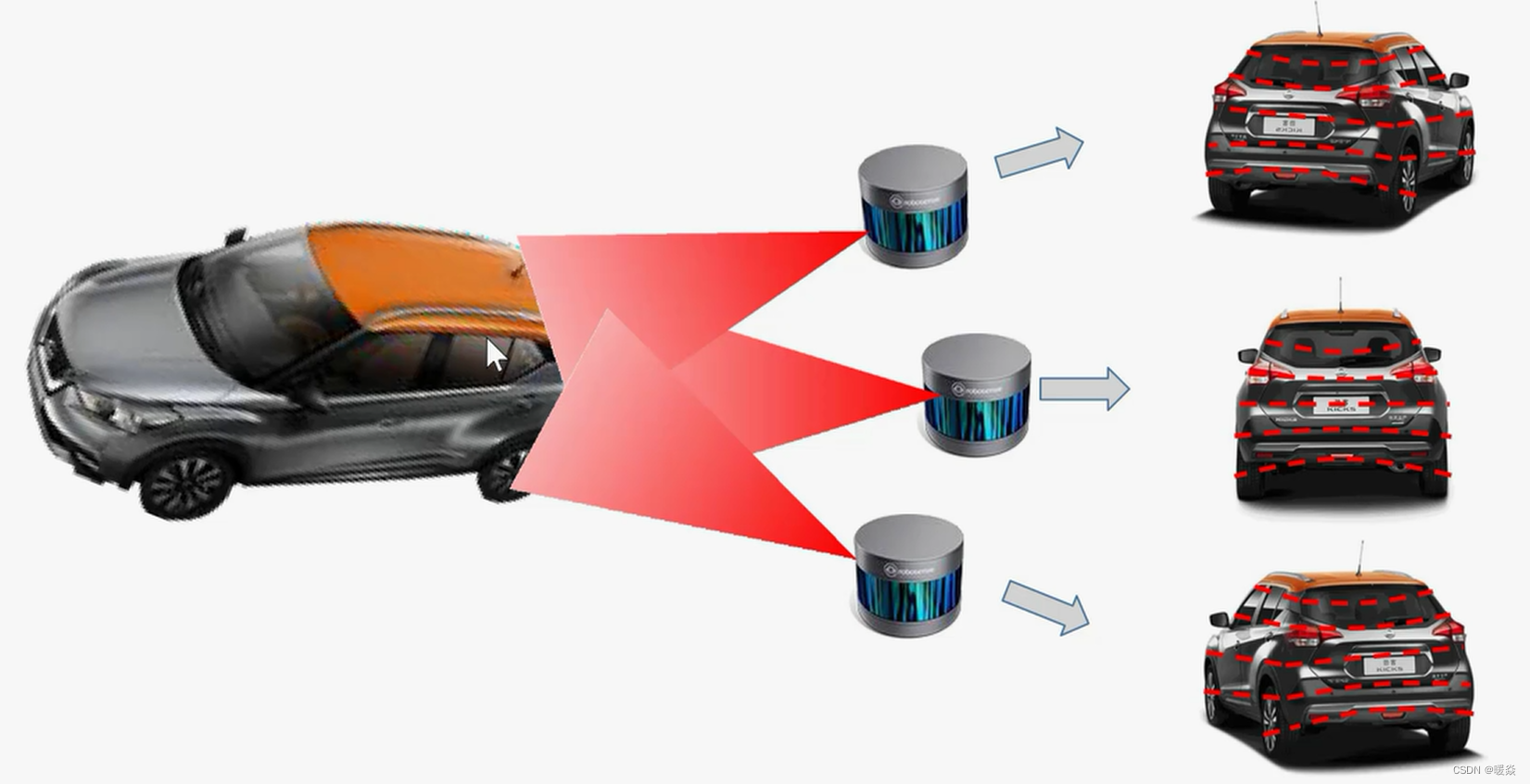
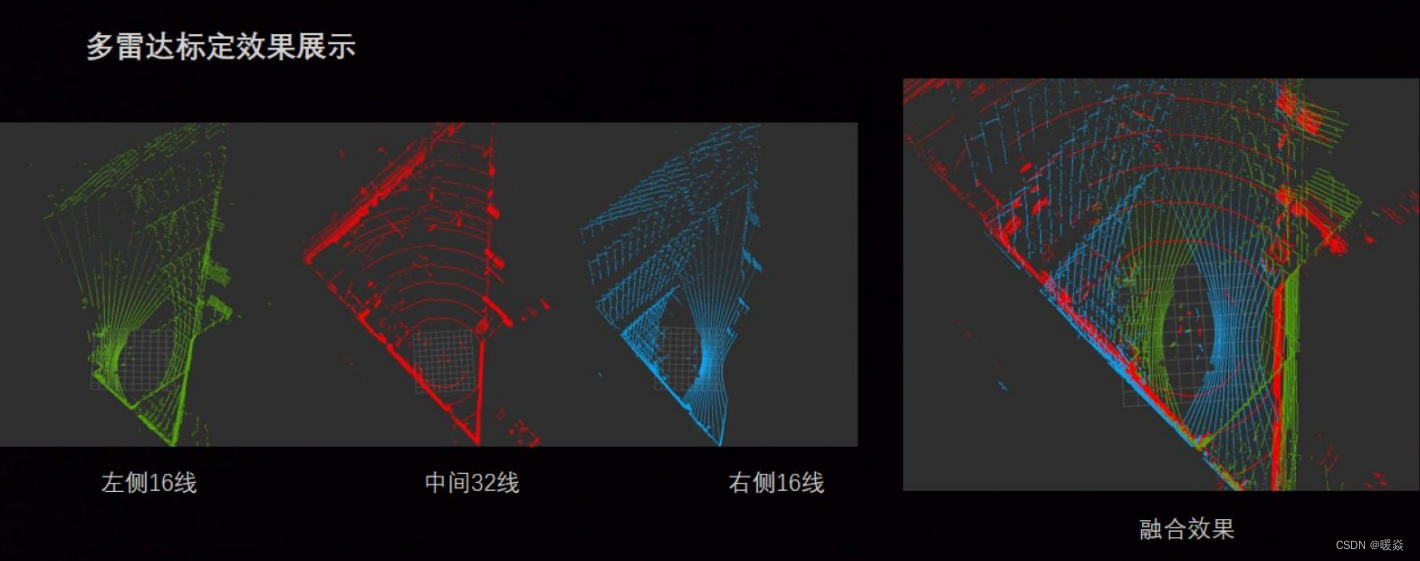
多激光雷达数据融合
为达到多线的效果,以多个少线数的激光雷达进行融合,降低成本。
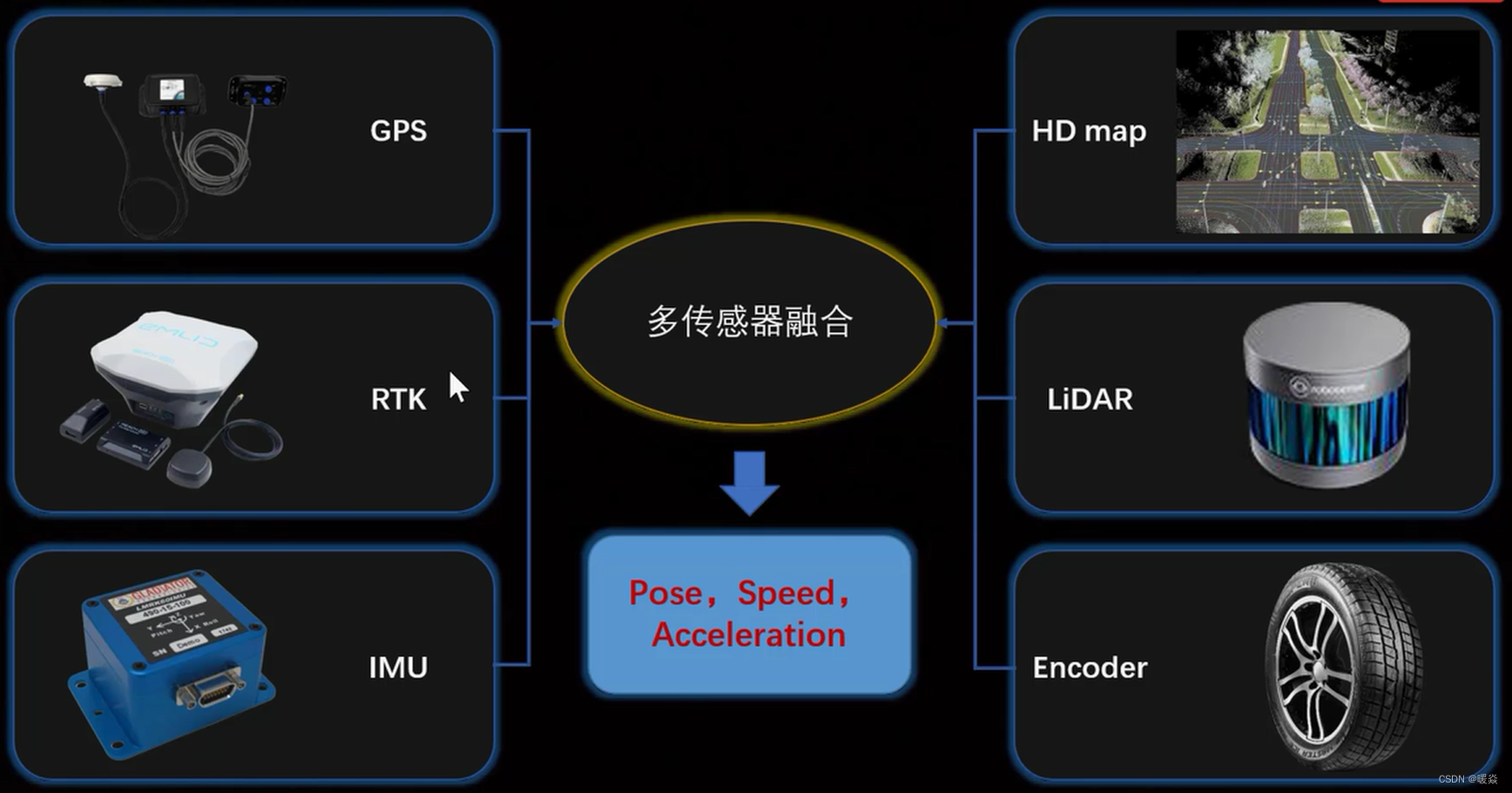
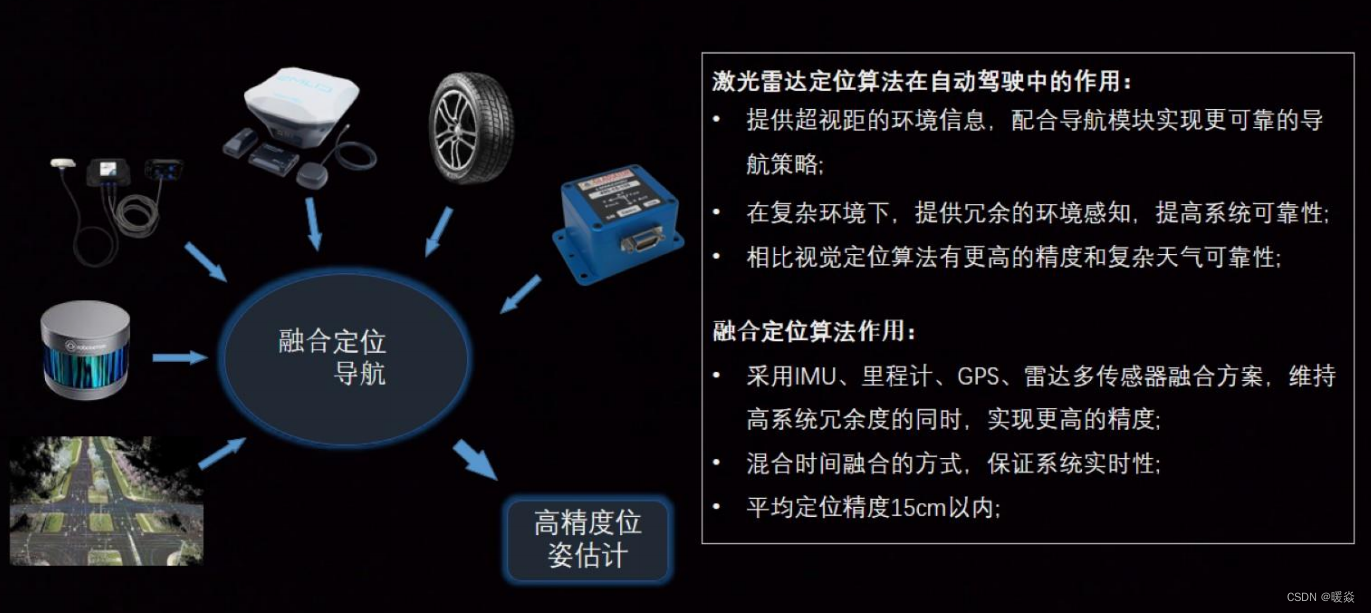
多传感器数据融合
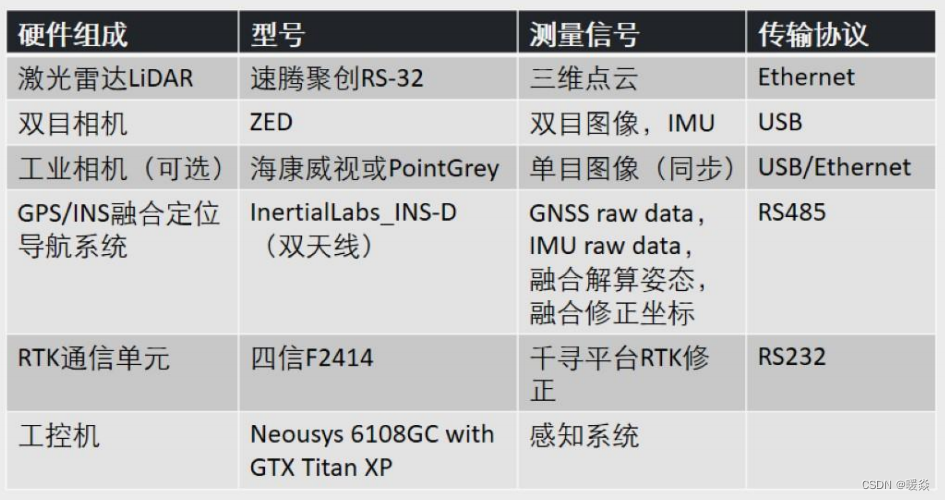
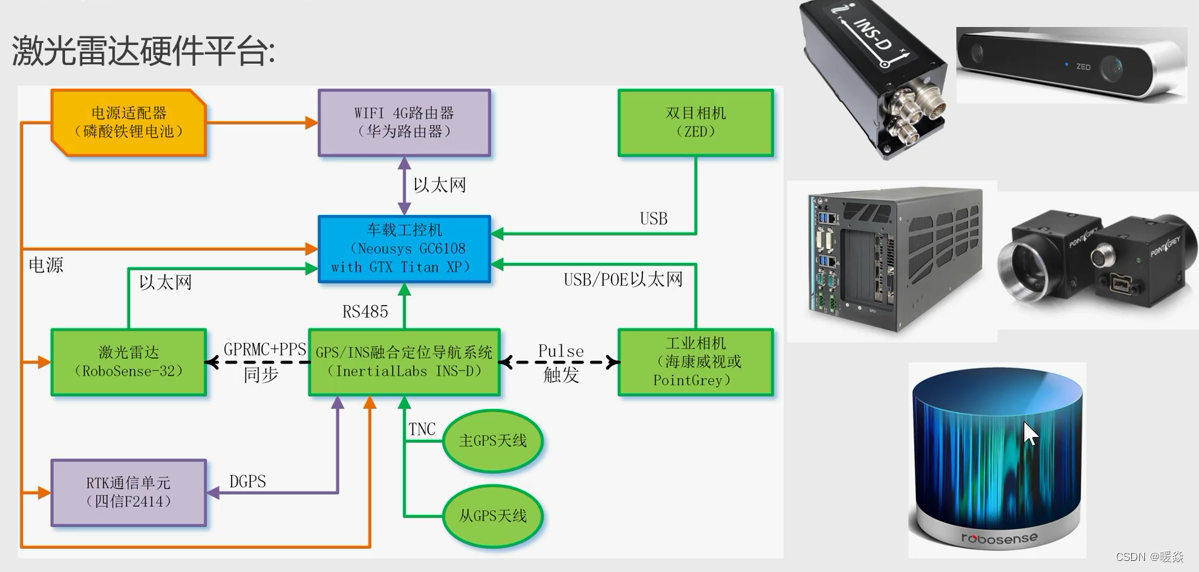
2.4 激光雷达系统方案


RS-LiDAR-16
RS-LIDAR-32B
GPS及惯导设备
IPC工控机
激光雷达安装支架(固定支架)
显示器
交换机
网线
多雷达模拟时间同步板
硬件部分
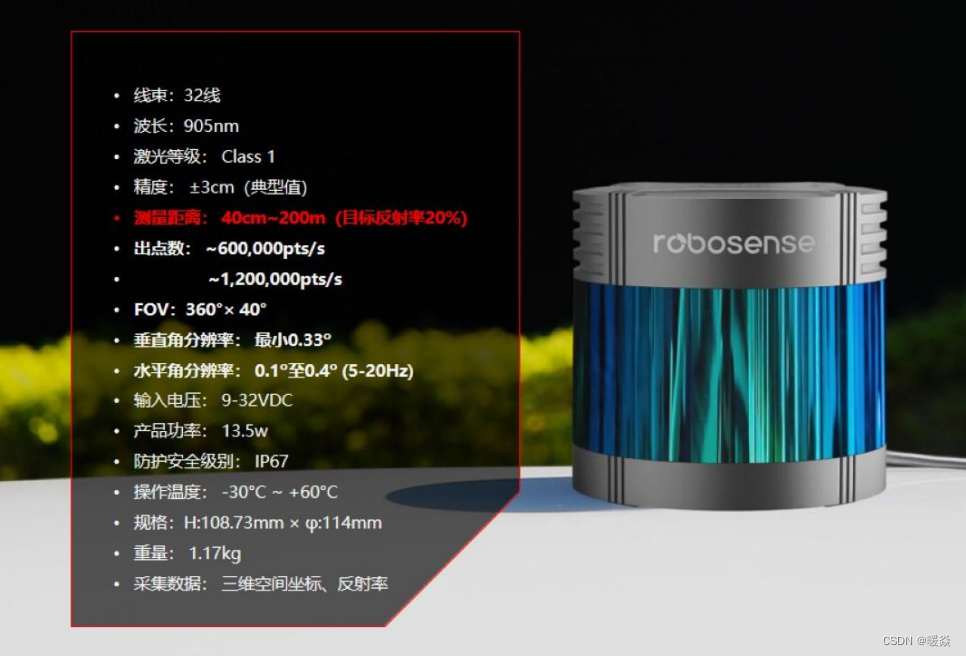

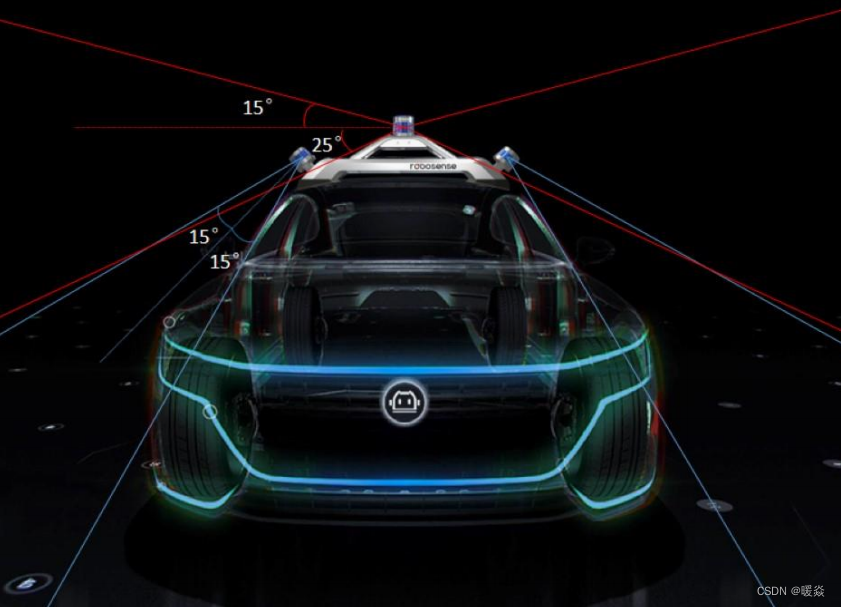
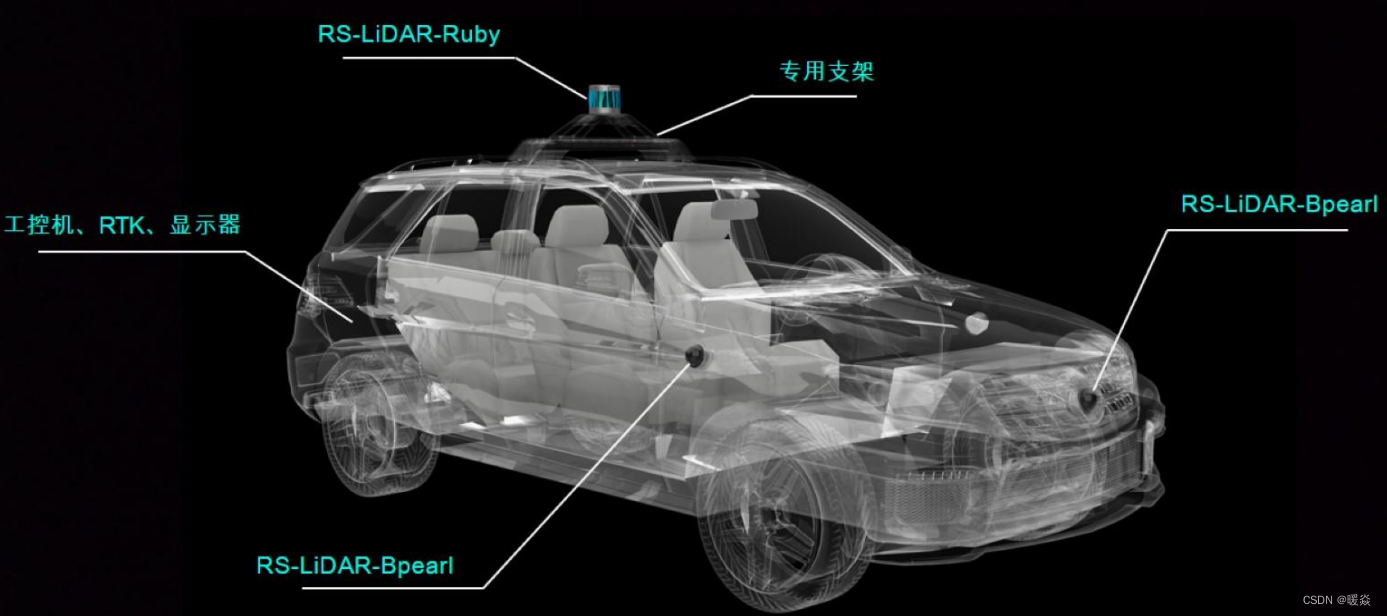
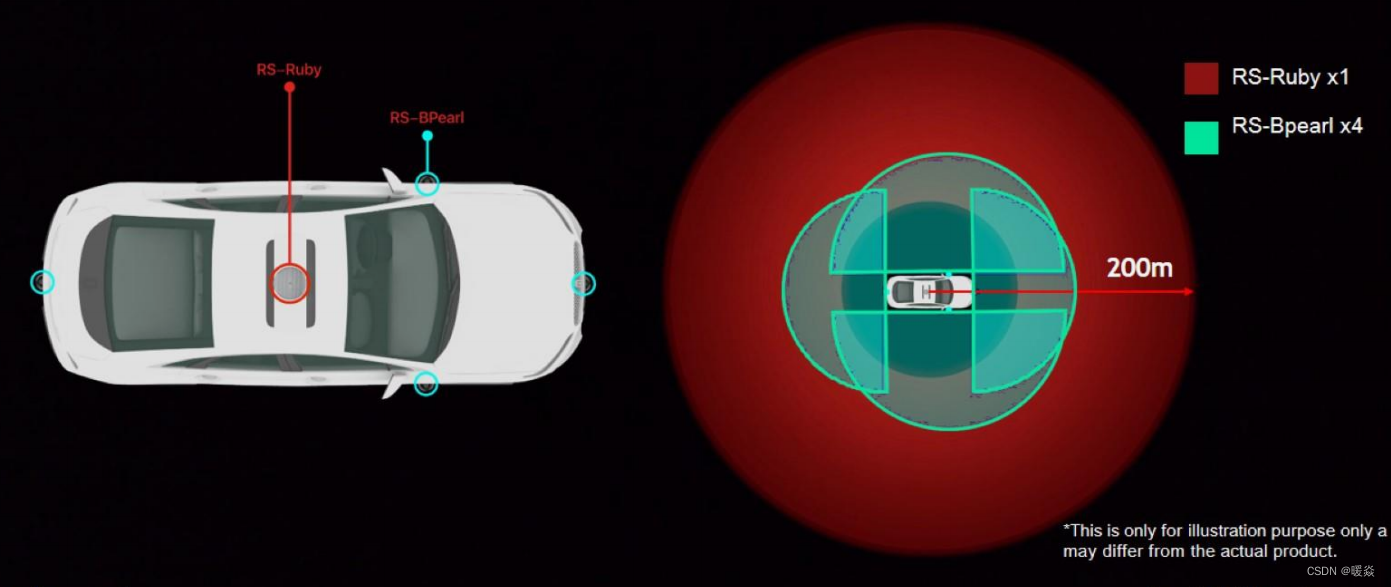
全方位感知(主雷达+近补雷达)

反射强度
抗干扰
抗多雷达对射干扰
抗强光干扰
多传感器融合
多传感器标定
时间同步
保证多个雷达的时间处于同一个时间计时标准(不进行时间同步时,每个雷达以启动时刻计时,使用自身内部独立的计时系统)。
外部时间源: GPS或网络时间源。
时间输入:
GPS通过UART接入雷达,发送GPRMC消息;PPS通过IO接入雷达,发送1 PPS脉冲信号。
网络时间通过以太网UDP指令发送时间,进行同步。
空间同步
保证所有的雷达数据转换到一个统一的坐标系下(不同雷达扫描到的同一个目标具有同样的坐标位置)
统一坐标系
选择位置最核心的一个雷达的坐标系作为雷达耦合的统一坐标系(理论上可以选择任意坐标系作为统一坐标系)
空间位置标定
平移量 – (x.y.z)
旋转量–(roll,pitch,yaw)
(平移量可以通过测量安装距离来标定初值,且有些安装方式是无法直接测距的,但是旋转量无法测量。)
软件部分

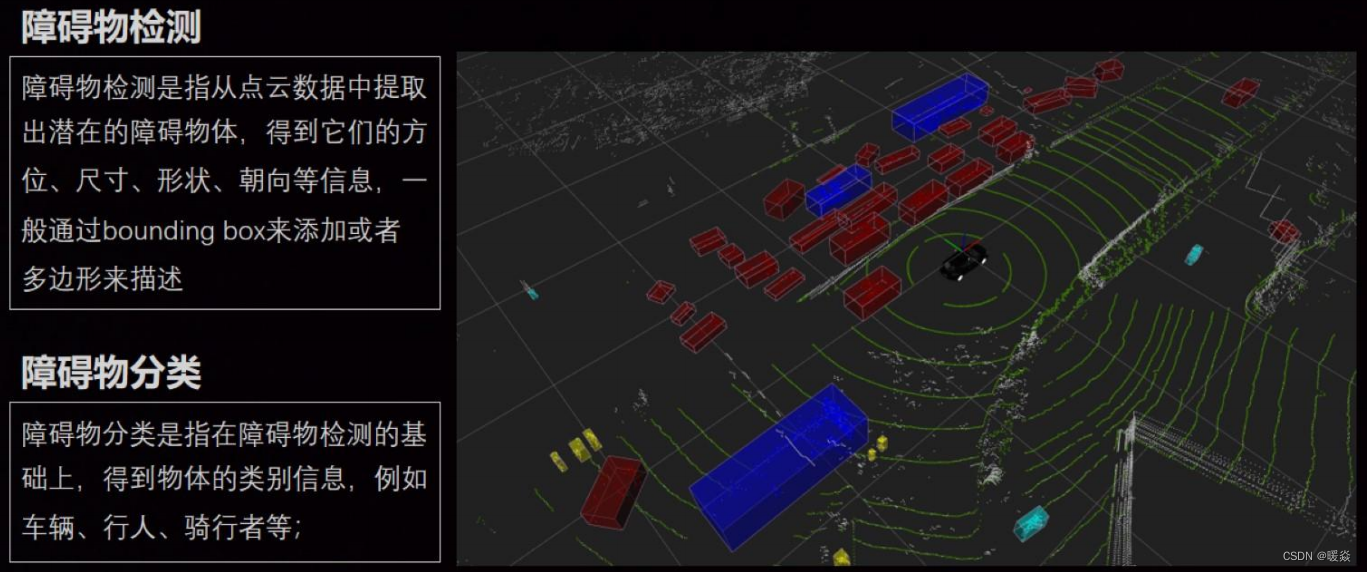
障碍物检测
障碍物检测是指从点云数据中提取出潜在的障碍物体,得到它们的方位、尺寸、形状、朝向等信息,
般通过bounding box来添加或者多边形来描述。
障碍物分类
障碍物分类是指在障碍物检测的基础上,得到物体的类别信息,例如车辆、行人、骑行者等。
运动物体跟踪
运动物体跟踪是指估计运动物体的运动状态,包括运动方向、速度大小、加速度、角速度、运动轨迹等
信息。
可行驶区域检测
可行驶区域检测是指在场景中分割出可以行驶的区域,根据不同的场景要求,相关的任务有路沿检测、车道线检测、地面检测、路面检测等任务。
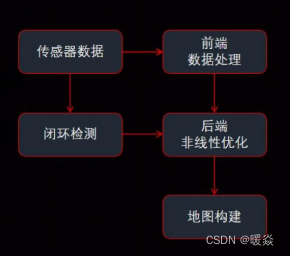
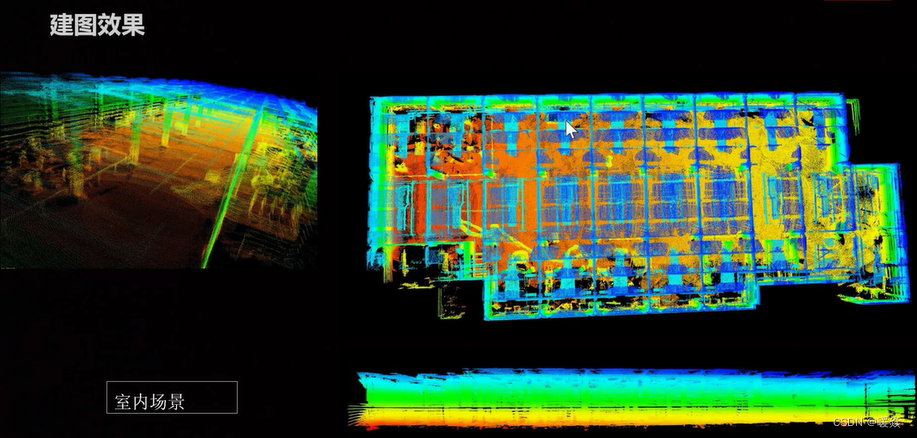
SLAM建图
建图算法的挑战:
精度高满足定位算法厘米级需求;
大场景稳定性高,精度不随地图增大而降低;
人工干预少,重复精度高;

重定位
定位场景展示:
小型移动机器人
特点:
经常发生灵活机动
角速度较大
视角比较低
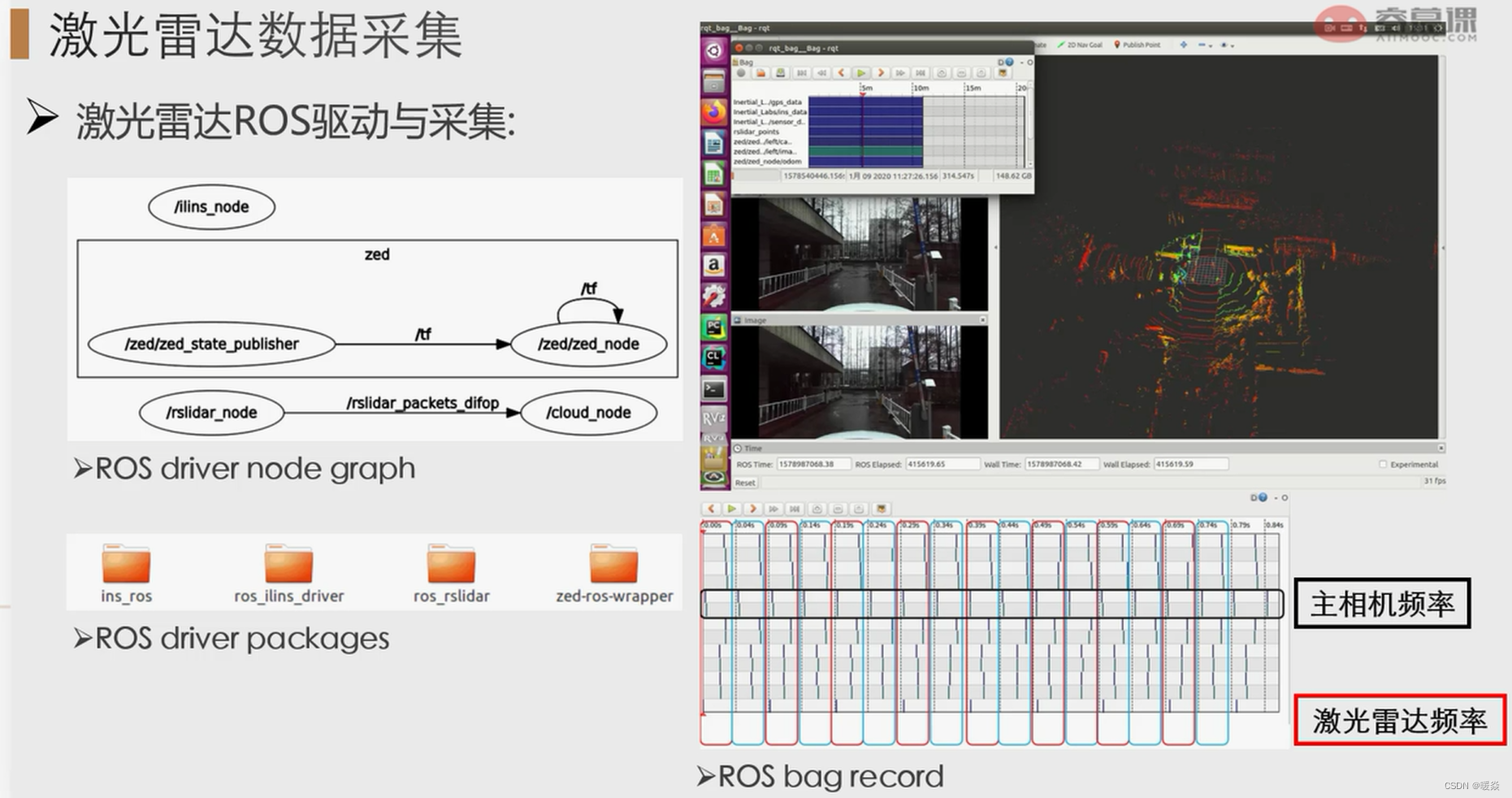
3 激光雷达数据采集