前言
STM32F103系列的MCU,相比普通的51单片机,在输出硬件PWM这个功能上要强不少,两者实现的方式都类似,都是通过一个定时器来启用硬件PWM输出,不过在输出PWM通道的数量上,32F103要强上不少。仅通过一个高级定时器1,即TIM1就可以输出4路频率相同,占空比独立的PWM信号,这四路PWM还分别有互补通道,且带死区和刹车功能。
利用TIM1来产生4路频率相同,占空比不同的PWM信号
初始化的方法其实跟前面几篇文章初始化其他外设的步骤类似,也是先定义一个结构体变量,然后给这个结构体变量的成员配置好相应的初值,最后调用初始化函数,这样就完成外设初始化了。再通过调用开外设的函数,就可以把外设功能使能。
首先定义一个结构体变量来初始化TIM1(定义PWM信号的频率)
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //配置时基结构体,声明一个结构体变量方便传参
//=====================时基初始化======================//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE); //开TIMER1外设时钟
TIM_TimeBaseStructure.TIM_Prescaler = 72-1;
// 计数器计数模式
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period = 10000-1;
// 时钟分频因子 - 一分频,配置死区时间需要用到
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV4;
// 重复寄存器的值,没有用到,不管
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);
我使用的是倍频到72M的时钟信号作为APB2的时钟总线,然后我分频器选择的是72分频,那么分频之后的周期就是1/1M,即TIM1往上计数一次是1us,然后计数周期我设置为了从0计数到9999,即10000次,耗时就是10ms。所以我设置的PWM频率就是100Hz的。
下一步开始设置PWM的结构体,在手册中,硬件PWM这部分内容是属于 高级定时器中的:输出/比较模式 ,所以要配置PWM,我们就要配置 输出/比较结构体。
TIM_OCInitTypeDef TIM_OCInitStructure; //配置输出比较结构体,声明一个结构体变量方便传参
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //TIM1通道1输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; //互补通道使能
TIM_OCInitStructure.TIM_Pulse = 4000; //占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; //互补通道也是高电平有效
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //空闲状态 低电平
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //互补通道空闲状态 低电平
TIM_OC1Init(TIM1,&TIM_OCInitStructure); //初始化TIM1通道1输出PWM
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //TIM1通道2输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable; //互补通道失能
TIM_OCInitStructure.TIM_Pulse = 6000; //占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; //互补通道也是高电平有效
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //空闲状态 低电平
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //互补通道空闲状态 低电平
TIM_OC2Init(TIM1,&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //TIM1通道3输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable; //互补通道失能
TIM_OCInitStructure.TIM_Pulse = 8000; //占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; //互补通道也是高电平有效
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //空闲状态 低电平
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //互补通道空闲状态 低电平
TIM_OC3Init(TIM1,&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //TIM1通道4输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable; //互补通道失能
TIM_OCInitStructure.TIM_Pulse = 9000; //占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; //互补通道也是高电平有效
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //空闲状态 低电平
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //互补通道空闲状态 低电平
TIM_OC4Init(TIM1,&TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable); //使能TIM1 输出比较1的预装载使能 想要改变占空比 得先输出完当前周期的波形之后 到下个波形才按照新的占空比(更新事件发生后才改变占空比)
TIM_Cmd(TIM1,ENABLE); //开启TIM1
TIM_CtrlPWMOutputs(TIM1,ENABLE); //开启PWM输出
其实看起来内容多,实际上都是重复的内容。高级定时器的每路PWM通道,都通过一个库函数来初始化,比如通道1就是调用TIM_OC1Init(TIM1,&TIM_OCInitStructure); 前面这个形参是配置利用哪个定时器的通道1来产生PWM信号,后面这个形参就是我们定义的结构体变量的首地址,负责传入我们配置的相应参数。
除了高级定时器,通用定时器也可以产生PWM信号,但是基本定时器是无法产生PWM信号的,基本定时器的功能只有下面这几个:

回到正题,配置完时基和输出/比较模式的PWM模式的寄存器之后,再把PWM四个通道的IO配置一下:
void AdvanceTim_GPIO_Config(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//刹车通道
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_ResetBits(GPIOB,GPIO_Pin_12); //默认为低电平,这个脚一旦被拉高证明刹车有效,立刻停止输出PWM
//TIM1 CHANNEL1互补通道
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
}
这里暂时只需要关注PA8、PA9、PA10、PA11这四个IO的配置,其他的是后面做刹车和互补才需要用到的。
配置起来其实很简单,但是要注意GPIO模式要配置为复用的推挽输出模式。
在设置完这些之后,就可以去主函数里面调用了。
给前面我们写的初始化时基和PWM寄存器的代码写到同一个函数里:
void AdvanceTim_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //配置时基结构体,声明一个结构体变量方便传参
TIM_OCInitTypeDef TIM_OCInitStructure; //配置输出比较结构体,声明一个结构体变量方便传参
//=====================时基初始化======================//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE); //开TIMER1外设时钟
TIM_TimeBaseStructure.TIM_Prescaler = 72-1;
// 计数器计数模式
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period = 10000-1;
// 时钟分频因子 - 一分频,配置死区时间需要用到
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV4;
// 重复寄存器的值,没有用到,不管
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);
//====================================================//
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //TIM1通道1输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; //互补通道使能
TIM_OCInitStructure.TIM_Pulse = 4000; //占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; //互补通道也是高电平有效
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //空闲状态 低电平
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //互补通道空闲状态 低电平
TIM_OC1Init(TIM1,&TIM_OCInitStructure); //初始化TIM1通道1输出PWM
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //TIM1通道2输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable; //互补通道失能
TIM_OCInitStructure.TIM_Pulse = 6000; //占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; //互补通道也是高电平有效
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //空闲状态 低电平
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //互补通道空闲状态 低电平
TIM_OC2Init(TIM1,&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //TIM1通道3输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable; //互补通道失能
TIM_OCInitStructure.TIM_Pulse = 8000; //占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; //互补通道也是高电平有效
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //空闲状态 低电平
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //互补通道空闲状态 低电平
TIM_OC3Init(TIM1,&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //TIM1通道4输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable; //互补通道失能
TIM_OCInitStructure.TIM_Pulse = 9000; //占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; //互补通道也是高电平有效
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //空闲状态 低电平
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //互补通道空闲状态 低电平
TIM_OC4Init(TIM1,&TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable); //使能TIM1 输出比较1的预装载使能 想要改变占空比 得先输出完当前周期的波形之后 到下个波形才按照新的占空比(更新事件发生后才改变占空比)
TIM_Cmd(TIM1,ENABLE);
TIM_CtrlPWMOutputs(TIM1,ENABLE);
}
在主函数中:
int main(void)
{
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); //禁用JTAG
AdvanceTim_GPIO_Config();
AdvanceTim_Mode_Config();
while(1)
{
}
}
下载到板子上,用逻辑分析仪抓取PA8/9/10/11这四个IO的波形,可以观察到,四路PWM信号的频率相同(因为都是通过TIM1产生的),但是四路PWM信号的占空比分别为40%、60%、80%、90%。这就实现了硬件PWM的输出。
输出TIM1通道1的互补信号
其实这个不用单独再拿出来讲,在配置TIM1通道1的时候,有几个结构体成员的值修改一下,即可输出通道1的互补信号。
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //TIM1通道1输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; //互补通道使能
TIM_OCInitStructure.TIM_Pulse = 4000; //占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //高电平有效
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High; //互补通道也是高电平有效
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //空闲状态 低电平
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //互补通道空闲状态 低电平
TIM_OC1Init(TIM1,&TIM_OCInitStructure); //初始化TIM1通道1输出PWM
TIM_OutputNState 这个成员配置为TIM_OutputNState_Enable,那么互补通道就使能了;
TIM_OCNPolarity 这个成员是配置互补通道是什么电平有效;
TIM_OCNIdleState_Reset 这个成员是配置互补通道的空闲状态应该是什么电平。
一般如果要用到互补模式的话,互补通道的配置与通道1是相同的,如果需要产生错相的两路PWM信号,那么要用到中心对其模式才能做到,硬件PWM是不具备输出错相PWM波的功能的。
配置了有关PWM的寄存器之后,配置一下互补通道的GPIO,也是配置为复用推挽输出模式。不过要注意的是每路PWM信号的输出脚和互补脚都有很多个,我这边因为MCU脚位只有64个,所以还不需要选择在哪个IO输出;推测应该是如果把IO设置为了复用输出模式,那么PWM就会从那个复用脚输出出来,不需要再配置相应的寄存器了。
刹车功能的使用
这个功能我仅限于能使用,一些较为深层次的原理和使用场景我就说不出来了。
在前面定义的AdvanceTim_Mode_Config(void)函数中,多声明一个结构体成员,并且调用初始化函数来初始化 刹车 和 死区寄存器。
TIM_BDTRInitTypeDef TIM_BDTRInitStructure; //配置有关刹车和死区结构体,声明一个结构体变量方便传参
// TIM_BDTRInitStructure这个结构体配置的是 刹车和死区寄存器(TIMx_BDTR)
// 当 BKIN 引脚检测到低电平的时候,输出比较信号被禁止,就好像是刹车一样
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; // 运行模式下的“关闭状态”选择 - 使能
TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable; // 空闲模式下的"关闭状态"选择 - 使能
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1; // 锁定等级1
TIM_BDTRInitStructure.TIM_DeadTime = 0xFF;
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Enable; // 刹车功能使能 - 开启刹车输入
TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High; // 刹车信号 - 高电平刹车
TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable; // 自动输出使能
TIM_BDTRConfig(TIM1,&TIM_BDTRInitStructure);
TIM_OSSRState 和 TIM_OSSIState 这两个成员配置的是 TIMx_BDTR寄存器里面的 OSSR位 和 OSSI位,其他的成员,互相之间是有关联的,比如 TIM_LOCKLevel 锁定等级如果配置的是 2 或者 3,那么 TIMx_BDTR这个寄存器在配置完之后,有一些成员是没法再改变值的,这是ST对这个功能的一些保护机制。后面的几个成员就比较好理解,注释有写,不再过多解释。
关于TIM_DeadTime 这个成员,配置的是DTG[7:0]这七位数据,这7位数据比较有意思,手册是这样写的:
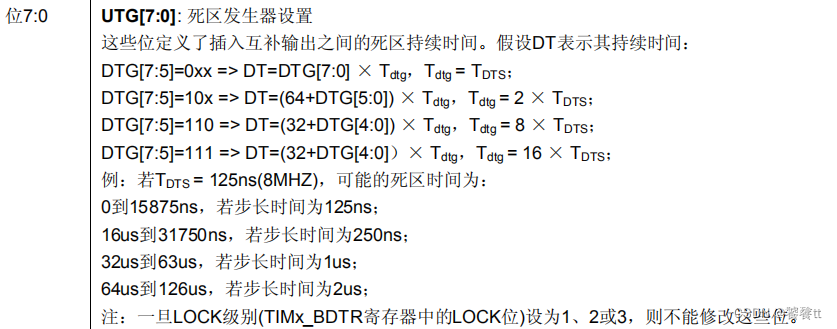
5-7位填入不同的值,Tdtg的值不同,Tdts是我们在配置时基那里配置的,我为了让死区时间更加明显,所以我配置的都比较久,Tdts我配置为了TIM1时钟的四分频,我的TIM1时钟配置为了1M,那么Tdts就是250Khz 的频率,Tdtg=16/250Khz,在乘以(32+(0-4位配置的数值))。
配置了BDTR寄存器之后,配置一下刹车通道的输入,这里是我当时比较疑惑的,我不太明白为什么刹车通道也是配置为复用推挽输出模式。反正按照这样设置完之后,把PB12这个IO一拉高,所有的硬件PWM信号全部停止输出,会全部回到空闲状态我配置的那个电平状态。
//刹车通道
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_ResetBits(GPIOB,GPIO_Pin_12); //默认为低电平,这个脚一旦被拉高证明刹车有效,立刻停止输出PWM
到这,TIM1的PWM输出、互补输出、死区、刹车,这几个功能就全都实现了。