文章目录
- 1 背景
- 2 方法
- 2.1 方向盘修正行为标识
- 2.2 数据
- 2.3 数据拟合
- 3 结果
- 3.1 速率曲线
- 3.2 恒定的转向时间
- 3.3 基本运动元素的叠加
- 3.4 其他实验
- 4 讨论
- 5 总结(个人)
1 背景
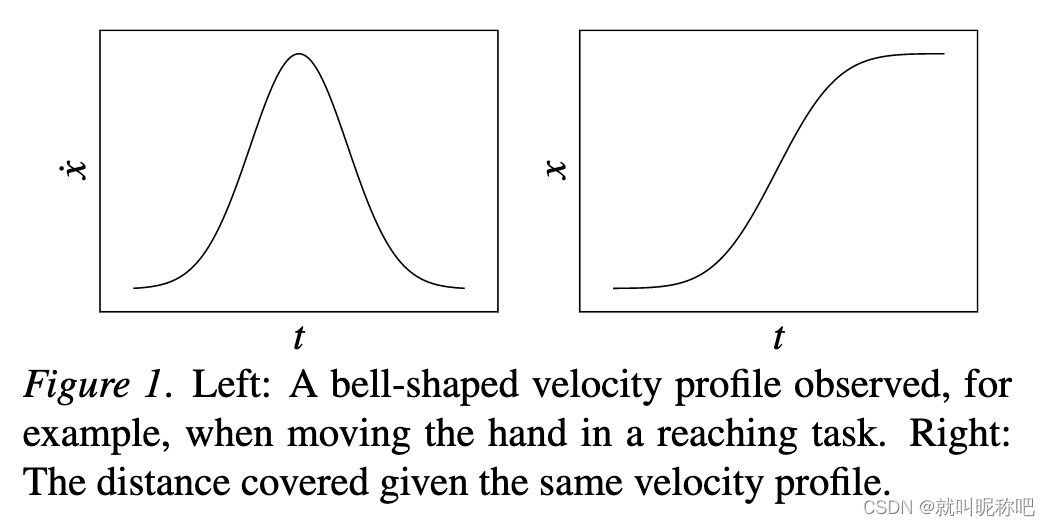
这篇短文的主要目的是去阐述“转方向盘”这一行为的基本性质:方向盘修正行为大致上服从一个方向盘转动速率的钟形曲线。(类似于reaching behavior如下图,所谓reahcing behavior,就是指人伸手去摸东西)
本文主要去探究以下3个问题:
- 方向盘修正行为是否也服从于一个钟形速率曲线?
- 方向盘转动速率和方向盘转角是否存在一个线性关系?这意味着方向盘修正的时间是个常量
- 复杂的方向盘转动行为是否可以由一些基本的行为元素组成?(motor primitives)
2 方法
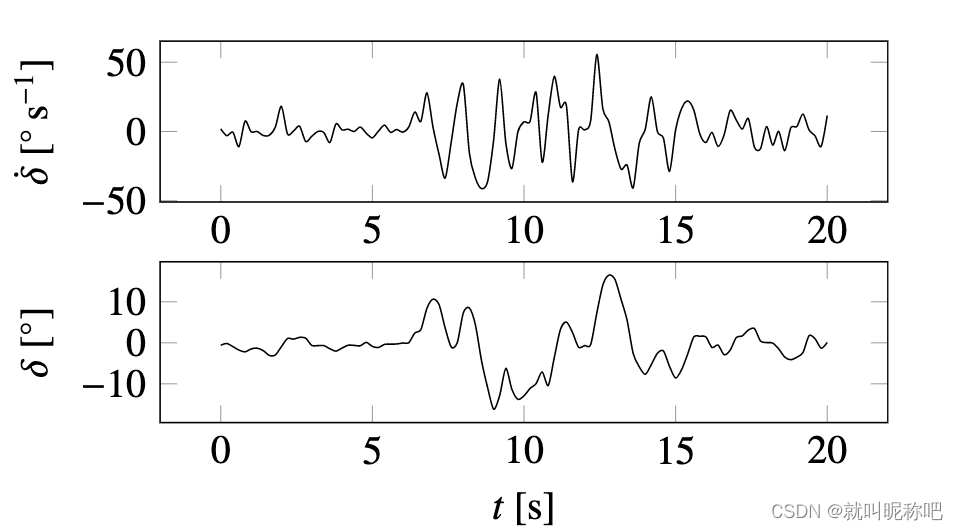
本文只去探究方向盘的角度 δ ( t ) \delta(t) δ(t)和方向盘转动速率 δ ˙ ( t ) \dot{\delta}(t) δ˙(t)。如下图所示,可以看到, δ ( t ) \delta(t) δ(t)的单位是“角度”, δ ˙ ( t ) \dot{\delta}(t) δ˙(t)的单位是“角度/秒”。单个车的方向盘修正行为是从各种不同的数据集里面提取的。
2.1 方向盘修正行为标识
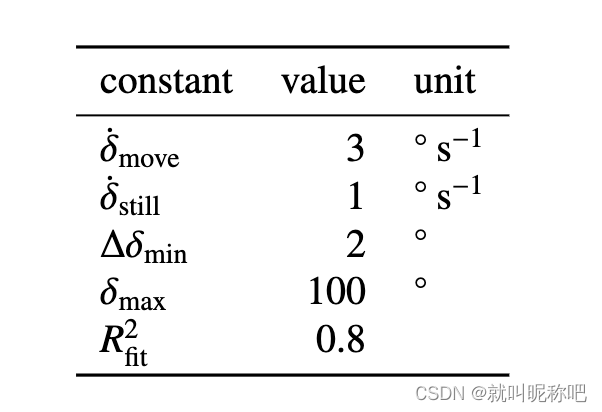
为了识别方向盘的修正行为,需要用到一些常量(其实就是清洗数据的一些规则),如上面这个图。
- 方向盘开始转动时间 t 0 t_0 t0:根据时间线,第一次满足不等式 ∣ δ ˙ ( t ) ∣ > δ ˙ m o v e |\dot{\delta}(t)| \gt \dot{\delta}_{move} ∣δ˙(t)∣>δ˙move的时间点
- 方向盘停止转动时间 t 1 t_1 t1:方向盘开始转动后,第一次满足不等式 ∣ δ ˙ ( t ) ∣ < δ ˙ s t i l l |\dot{\delta}(t)| \lt \dot{\delta}_{still} ∣δ˙(t)∣<δ˙still(论文里这个不等式是大于号,但是我个人理解感觉应该是小于号)
- 最大方向盘转动速率: δ ˙ m = m a x ( { δ ˙ ( t ) : t ∈ [ t 0 , t 1 ] } ) \dot{\delta}_m = max(\{\dot{\delta}(t):t\in [t_0, t_1]\}) δ˙m=max({δ˙(t):t∈[t0,t1]})
- 整体的方向盘角度变化: Δ δ = ∣ δ ( t 0 ) − δ ( t 1 ) ∣ \Delta \delta = |\delta(t_0) - \delta(t_1)| Δδ=∣δ(t0)−δ(t1)∣
应用上述规则去定义一个方向盘转动行为,还要额外考虑两条过滤规则,就是脏数据:
- Δ δ < Δ δ m i n \Delta \delta \lt \Delta \delta_{min} Δδ<Δδmin
- m a x ( δ ( t 0 ) , δ ( t 1 ) ) > δ m a x max(\delta(t_0), \delta(t_1)) \gt \delta_{max} max(δ(t0),δ(t1))>δmax
2.2 数据
数据集这方面,本文是选了6个数据来源,文中有进行一些简单介绍,这里就不记了,主要是想进行更完备的实验,得出更可靠的结论吧。
2.3 数据拟合
数据拟合就用高斯函数去做:
δ ˙ ( t ) = δ ˙ m e x p ( − ( t − b ) 2 2 σ 2 ) \dot{\delta}(t) = \dot{\delta}_m exp(-\frac{(t-b)^2}{2\sigma^2}) δ˙(t)=δ˙mexp(−2σ2(t−b)2)
如果数据拟合完出来的函数, R 2 > R f i t 2 R^2 \gt R_{fit}^2 R2>Rfit2,就认为符合钟形曲线。( σ \sigma σ与方向盘修正持续时间密切相关)
3 结果
3.1 速率曲线
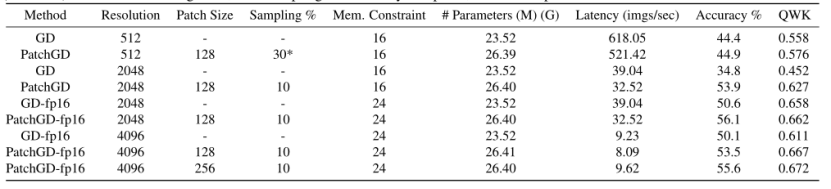
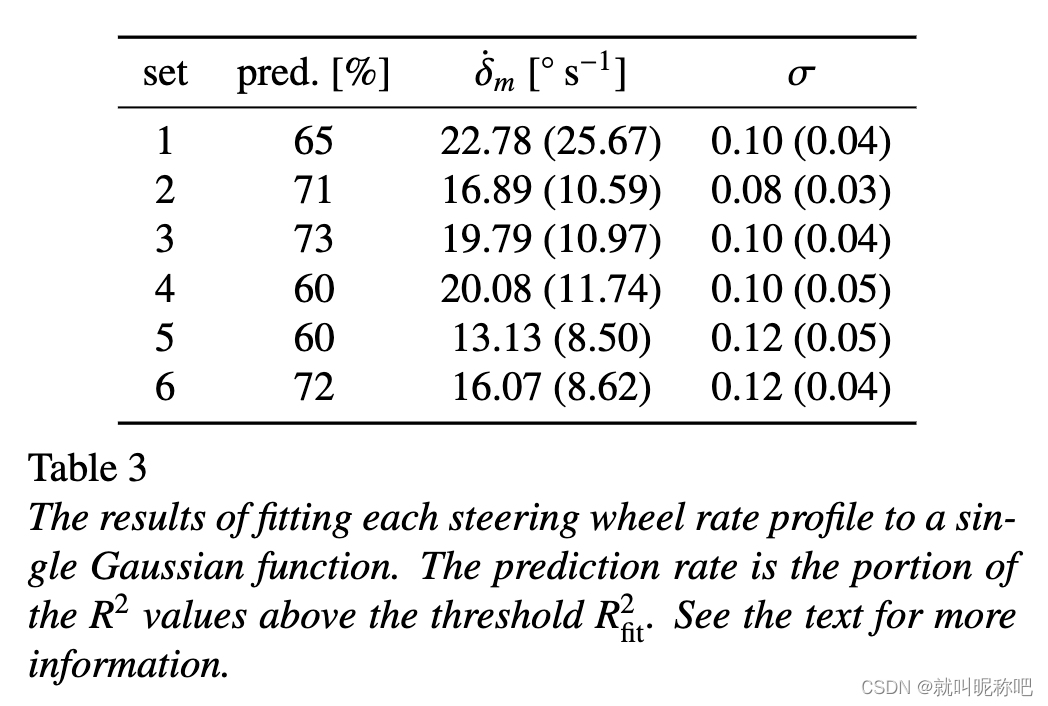
看下面这个图和表,就说绝大部分的这个方向盘修正行为都符合速率的钟形曲线,表的第二列代表的是每个数据集里可以被拟合成钟形的比率。这也回答了本文要探究的第一个问题。
3.2 恒定的转向时间
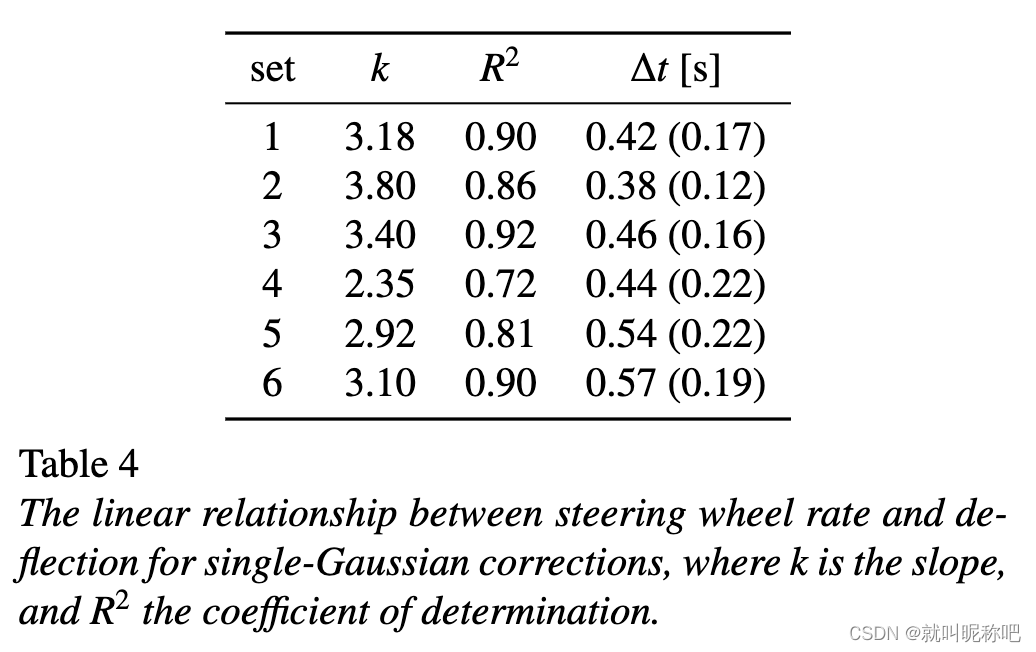
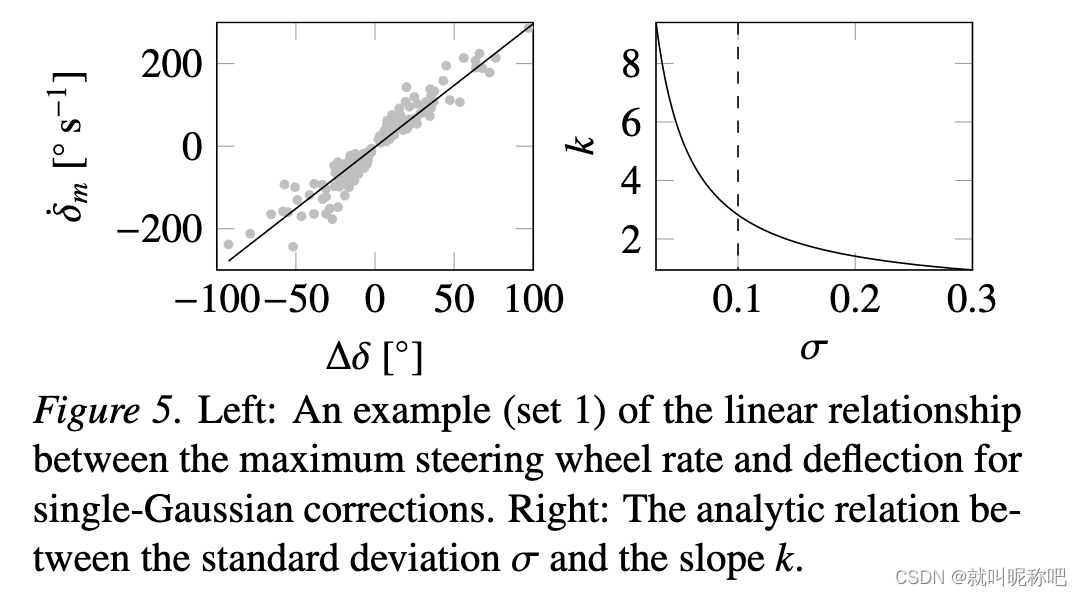
从上面那个表里面可以看出, σ \sigma σ在不同数据集几乎是一样的,这意味着方向盘转动的持续时间基本都相同,下表的 Δ t \Delta t Δt也指向相同结论。这意味着转向角和最大速率具有强烈的线性关系,从下表这个 k k k就可以看出来,另外去拟合线性关系也可以非常明显地看出这件事情,如下图。这回答了本文的第二个问题。
3.3 基本运动元素的叠加
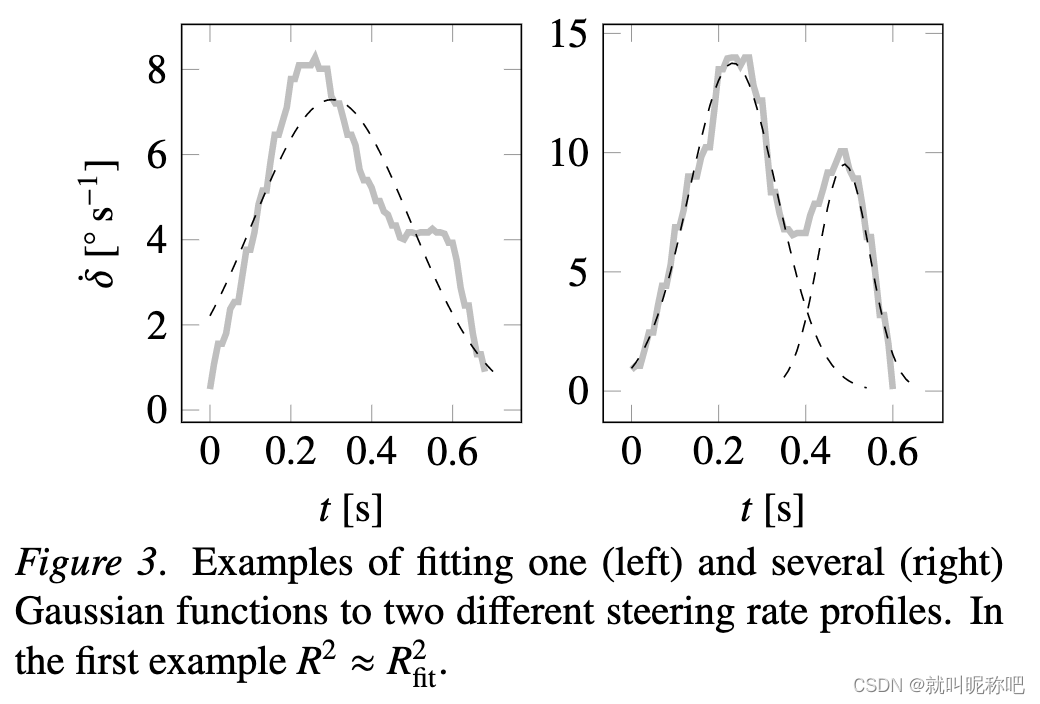
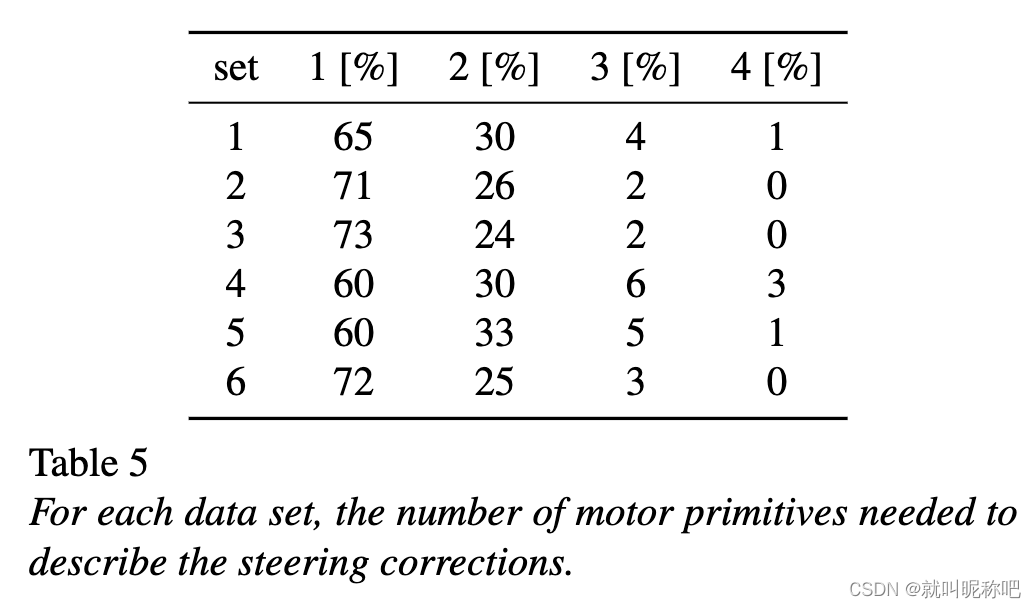
大多数的方向盘修正行为都可以被单个高斯函数拟合。对于那些拟合不好的,其实用多个高斯函数叠加去拟合也可以逐渐拟合成功,如下表所示,拟合标准还是 R 2 > R f i t 2 R^2 \gt R_{fit}^2 R2>Rfit2。可以看到基本上两个就可以拟合绝大部分了。这回答了本文的第三个问题。
3.4 其他实验
为了让实验结论更有说服力,本文还做了点其他的实验,比如区分男女司机,区分年龄这种。得到的结果没区别。
4 讨论
既然发现了转角和最大速率的线性关系,那其实就可以这样搞:
Δ δ = ∫ δ ˙ ( t ) d t = 2 δ ˙ m σ π δ ˙ m = Δ δ 2 σ π = k Δ δ k = 1 2 σ π \Delta \delta = \int \dot{\delta}(t)dt = 2\dot{\delta}_m\sigma \sqrt{\pi}\\ \dot{\delta}_m= \frac{\Delta \delta}{2\sigma \sqrt{\pi}} = k\Delta \delta\\ k = \frac{1}{2\sigma \sqrt{\pi}} Δδ=∫δ˙(t)dt=2δ˙mσπδ˙m=2σπΔδ=kΔδk=2σπ1
插入上面单个高斯函数拟合的那个表 σ = 0.1 \sigma=0.1 σ=0.1,可以得到 k = 2.8 k = 2.8 k=2.8
5 总结(个人)
感觉第一个比较吃惊的是reaching behavior是符合一个钟形的速率曲线,进而这篇文章证明了这个转方向盘这个行为也是这样。用在自动驾驶里面或许可以模拟出人类的开车行为,这篇文章是waymo的NIEON模型参考的文章,的参考的文章。
蛮有意思,或许人的其他什么行为,与手有关的是不是都符合这样的钟形速率曲线呢?