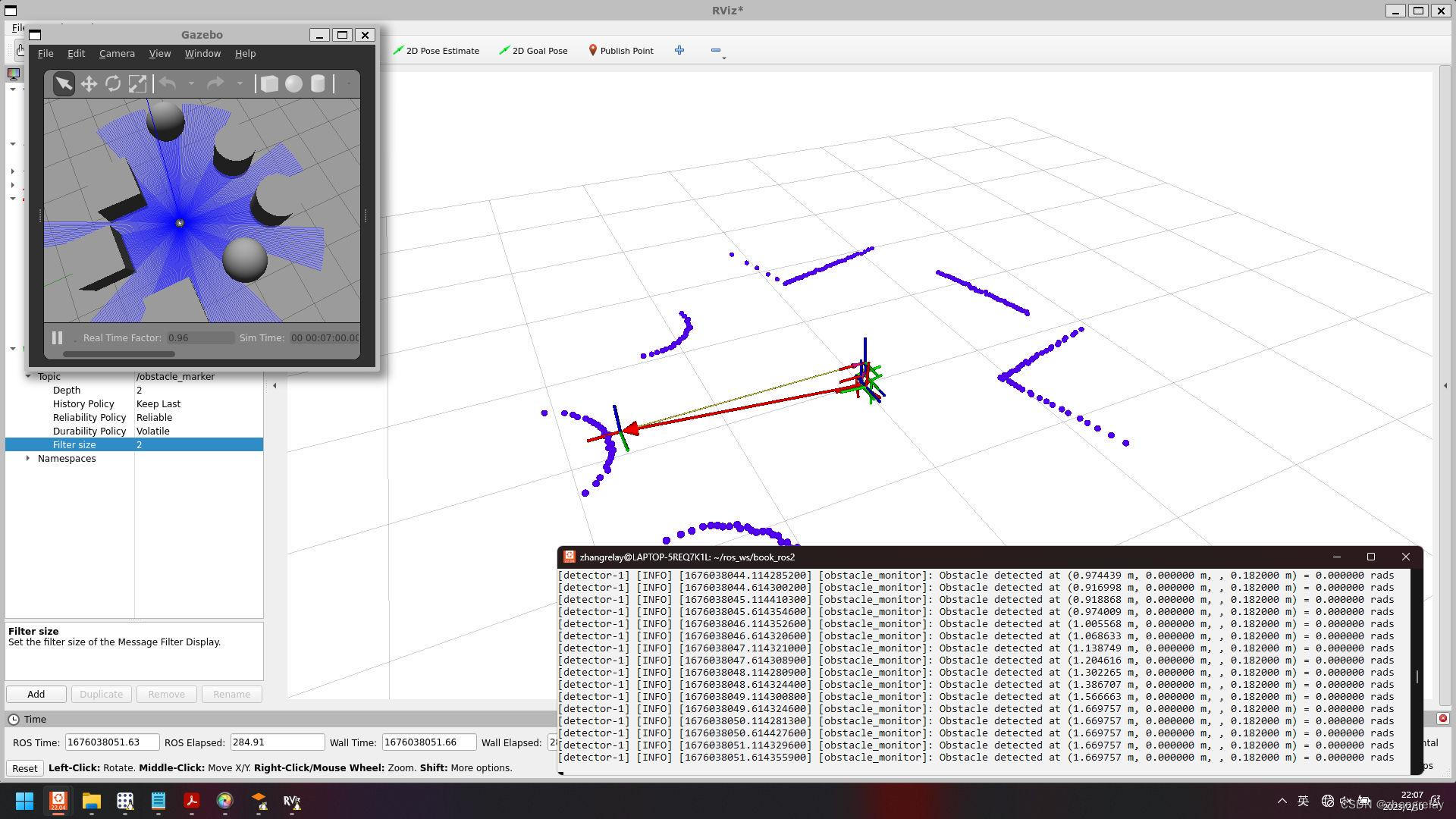
下图所示,机器人和障碍物直接距离:

可以看到如果是单线雷达,这种测距和传感器安装的位置密切相关。
chatgpt:
ROS2机器人的COMPUTATION GRAPH概念是指,通过构建一个图形结构,将机器人的计算任务分解成一系列的可执行步骤。其特点是具有易于理解、可扩展性强的特性,可以有效地提高机器人的计算性能。它的应用可以帮助机器人实现自主操作、自主导航等功能。
ROS2机器人激光测距系统的计算图是一种用于检测和定位物体的技术。它可以利用激光雷达发射的脉冲,经过反射后再次接收,从而测量物体到激光雷达的距离。它通常由一个传感器,一个处理器,一个控制器和一个软件组成,它们可以在ROS2机器人系统中实现自动控制和导航。
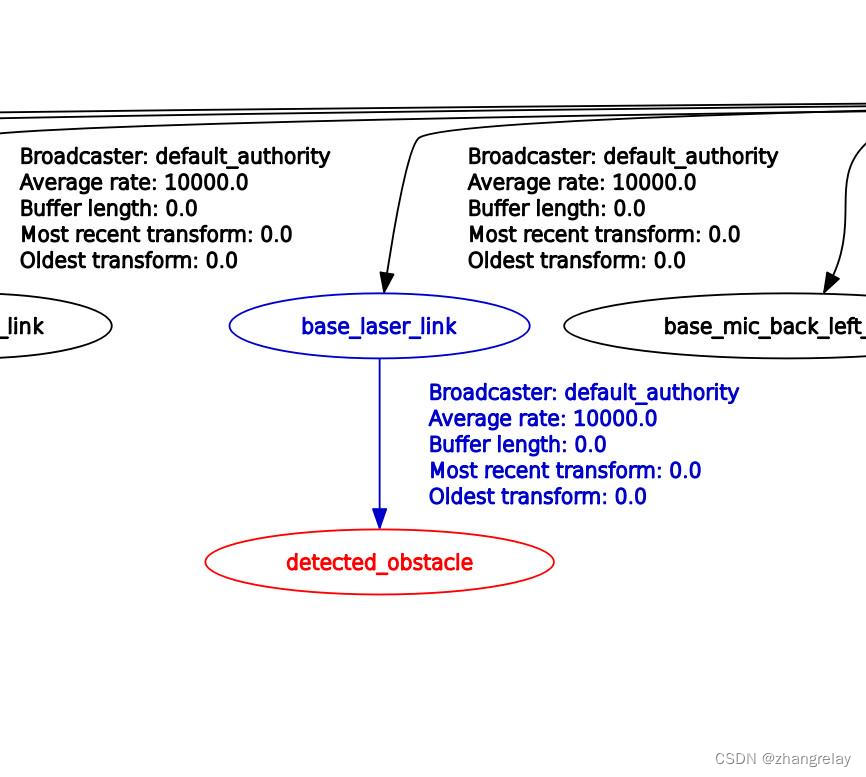
书中给出的图示:
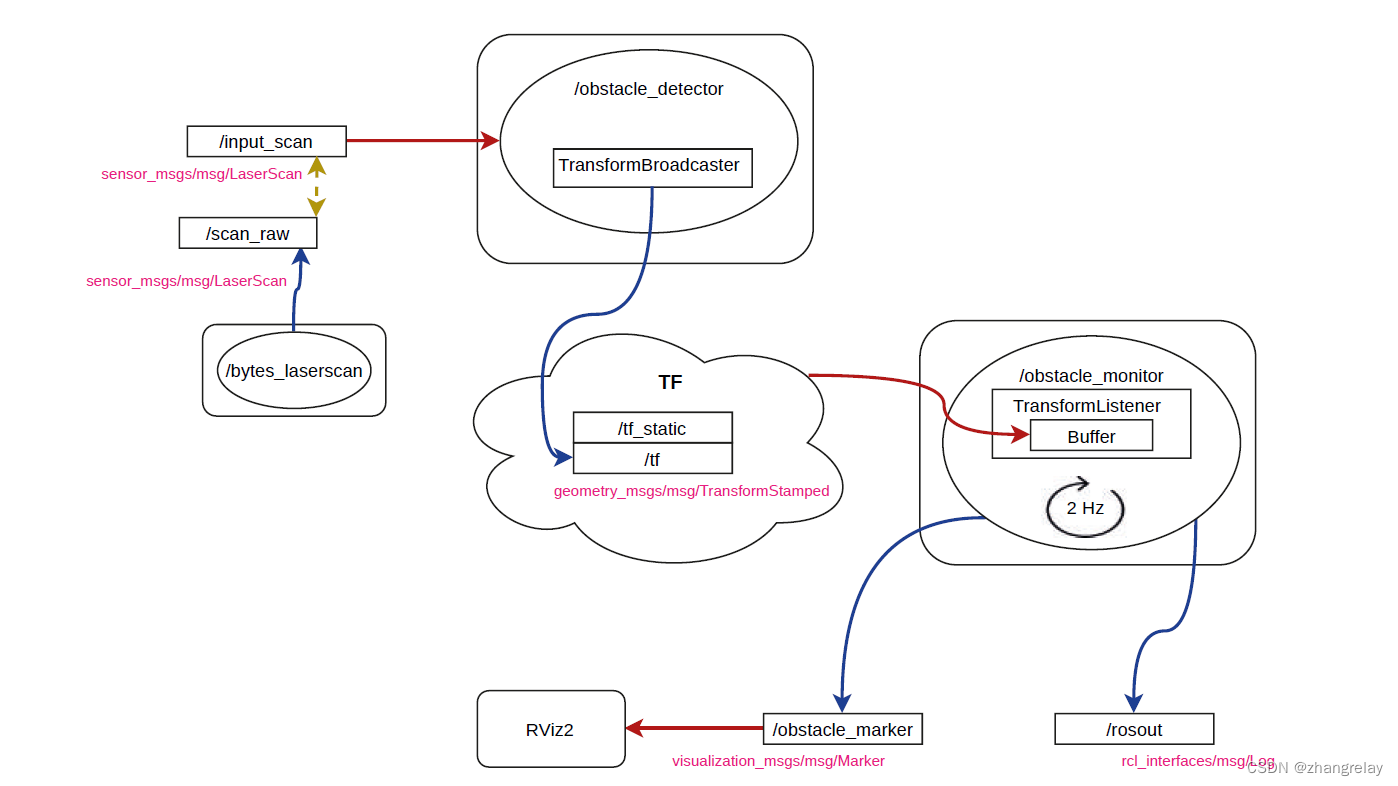
使用rqt工具获取,与此一致:
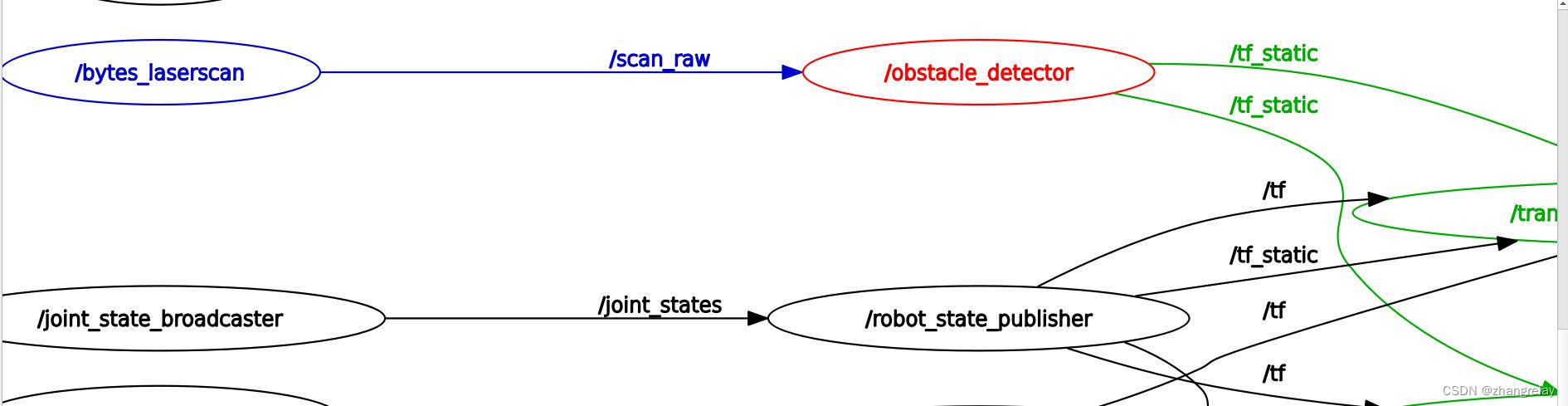
测得距离等,成功会有一组数据显示。
例如,turtlebot
例如,tiago
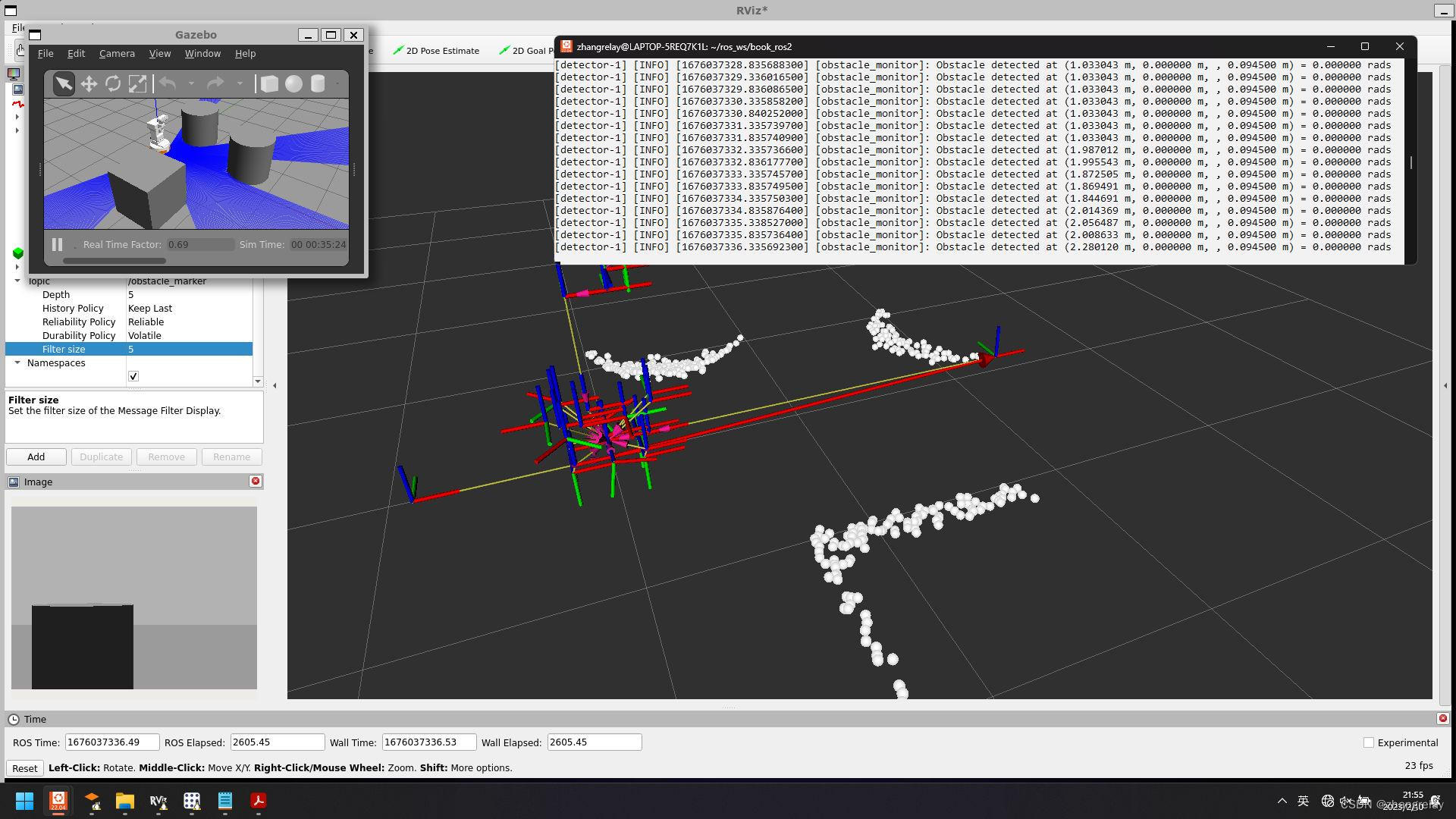
检测障碍物:

加个箭头→标记:
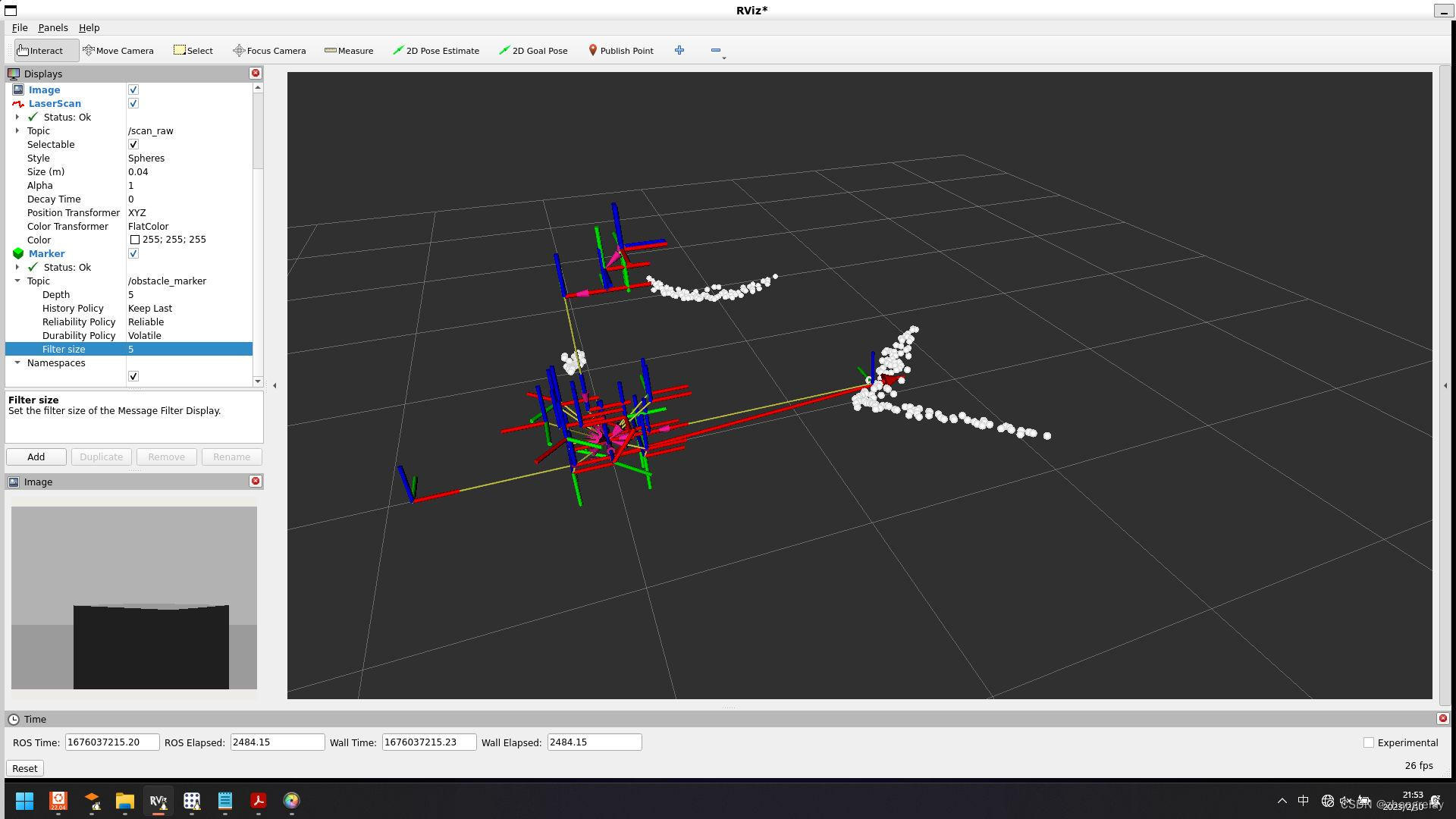
绘制 "base_footprint", "detected_obstacle":
// Copyright 2021 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <tf2/transform_datatypes.h>
#include <tf2/LinearMath/Quaternion.h>
#include <memory>
#include "br2_tf2_detector/ObstacleMonitorNode.hpp"
#include "geometry_msgs/msg/transform_stamped.hpp"
#include "tf2_geometry_msgs/tf2_geometry_msgs.hpp"
#include "rclcpp/rclcpp.hpp"
namespace br2_tf2_detector
{
using namespace std::chrono_literals;
ObstacleMonitorNode::ObstacleMonitorNode()
: Node("obstacle_monitor"),
tf_buffer_(),
tf_listener_(tf_buffer_)
{
marker_pub_ = create_publisher<visualization_msgs::msg::Marker>("obstacle_marker", 1);
timer_ = create_wall_timer(
500ms, std::bind(&ObstacleMonitorNode::control_cycle, this));
}
void
ObstacleMonitorNode::control_cycle()
{
geometry_msgs::msg::TransformStamped robot2obstacle;
try {
robot2obstacle = tf_buffer_.lookupTransform(
"base_footprint", "detected_obstacle", tf2::TimePointZero);
} catch (tf2::TransformException & ex) {
RCLCPP_WARN(get_logger(), "Obstacle transform not found: %s", ex.what());
return;
}
double x = robot2obstacle.transform.translation.x;
double y = robot2obstacle.transform.translation.y;
double z = robot2obstacle.transform.translation.z;
double theta = atan2(y, x);
RCLCPP_INFO(
get_logger(), "Obstacle detected at (%lf m, %lf m, , %lf m) = %lf rads",
x, y, z, theta);
visualization_msgs::msg::Marker obstacle_arrow;
obstacle_arrow.header.frame_id = "base_footprint";
obstacle_arrow.header.stamp = now();
obstacle_arrow.type = visualization_msgs::msg::Marker::ARROW;
obstacle_arrow.action = visualization_msgs::msg::Marker::ADD;
obstacle_arrow.lifetime = rclcpp::Duration(1s);
geometry_msgs::msg::Point start;
start.x = 0.0;
start.y = 0.0;
start.z = 0.0;
geometry_msgs::msg::Point end;
end.x = x;
end.y = y;
end.z = z;
obstacle_arrow.points = {start, end};
obstacle_arrow.color.r = 1.0;
obstacle_arrow.color.g = 0.0;
obstacle_arrow.color.b = 0.0;
obstacle_arrow.color.a = 1.0;
obstacle_arrow.scale.x = 0.02;
obstacle_arrow.scale.y = 0.1;
obstacle_arrow.scale.z = 0.1;
marker_pub_->publish(obstacle_arrow);
}
} // namespace br2_tf2_detector
生成tf-detected_obstacle:
// Copyright 2021 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <memory>
#include "br2_tf2_detector/ObstacleDetectorNode.hpp"
#include "sensor_msgs/msg/laser_scan.hpp"
#include "geometry_msgs/msg/transform_stamped.hpp"
#include "rclcpp/rclcpp.hpp"
namespace br2_tf2_detector
{
using std::placeholders::_1;
ObstacleDetectorNode::ObstacleDetectorNode()
: Node("obstacle_detector")
{
scan_sub_ = create_subscription<sensor_msgs::msg::LaserScan>(
"input_scan", rclcpp::SensorDataQoS(),
std::bind(&ObstacleDetectorNode::scan_callback, this, _1));
tf_broadcaster_ = std::make_shared<tf2_ros::StaticTransformBroadcaster>(*this);
}
void
ObstacleDetectorNode::scan_callback(sensor_msgs::msg::LaserScan::UniquePtr msg)
{
double dist = msg->ranges[msg->ranges.size() / 2];
if (!std::isinf(dist)) {
geometry_msgs::msg::TransformStamped detection_tf;
detection_tf.header = msg->header;
detection_tf.child_frame_id = "detected_obstacle";
detection_tf.transform.translation.x = msg->ranges[msg->ranges.size() / 2];
tf_broadcaster_->sendTransform(detection_tf);
}
}
} // namespace br2_tf2_detector
scan重命名等:
# Copyright 2021 Intelligent Robotics Lab
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
detector_cmd = Node(package='br2_tf2_detector',
executable='detector',
output='screen',
parameters=[{
'use_sim_time': True
}],
remappings=[
('input_scan', '/scan_raw')
])
ld = LaunchDescription()
ld.add_action(detector_cmd)
return ld
remappings=[
('input_scan', '/scan_raw')
])
可以依据具体主题名称进行调整。
chatgpt:
要使用激光雷达数据,首先需要将激光雷达连接到你的机器人。然后,可以通过ROS2中的ROS2话题进行数据传输。激光雷达生成的数据通常是PointCloud2消息类型,该消息类型包含三维点的坐标信息。
接下来,可以通过创建一个ROS2节点来订阅并处理激光雷达生成的数据。您可以使用ROS2提供的函数,例如subscribe()和callback(),在该节点中实现这一点。回调函数可以访问接收到的数据,并对其进行处理。
最后,可以使用ROS2提供的函数,例如publish(),在该节点中发布处理后的数据,以便其他节点可以访问。
总而言之,使用ROS2中的激光雷达数据需要以下步骤:
连接激光雷达到机器人
通过ROS2话题传输数据
创建ROS2节点订阅和处理数据
在该节点中发布处理后的数据。
使用 ROS2 中的 tf2 库可以方便地处理坐标变换,包括平移和旋转。首先,需要安装 ROS2 中的 tf2 库,然后在代码中引入 tf2 的头文件。
接下来,需要创建一个 tf2 的 TransformBroadcaster 对象,它将负责广播坐标变换的数据。可以使用 TransformBroadcaster 对象的 sendTransform 函数来广播坐标变换的数据。
sendTransform 函数需要传入一些参数,例如:变换的时间戳、变换的原点坐标、变换的目标坐标、变换的平移量和旋转量。
最后,可以使用 tf2 的 TransformListener 对象来订阅坐标变换的数据。TransformListener 对象可以帮助计算从一个坐标系到另一个坐标系的变换。
以上是 ROS2 中使用 tf2 处理坐标数据的一般流程。详细的示例代码可以在 ROS2 官方文档中找到。