一、软件硬件说明
软件:STM32CubeMX V6.6.1 /KEIL5 V5.29
硬件:正点原子mini开发板,SD卡,通过SPI方式驱动SD卡,用的是SPI1接口
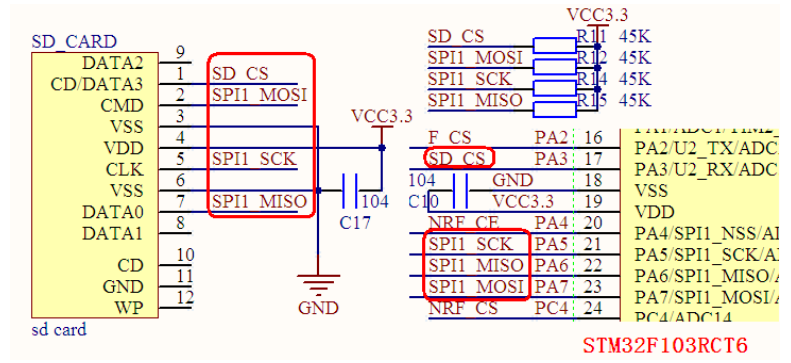

以上内容来源于正点原子mini开发板手册,SD卡的详细介绍也可以去查阅这个手册。
二、STM32CubeMX配置
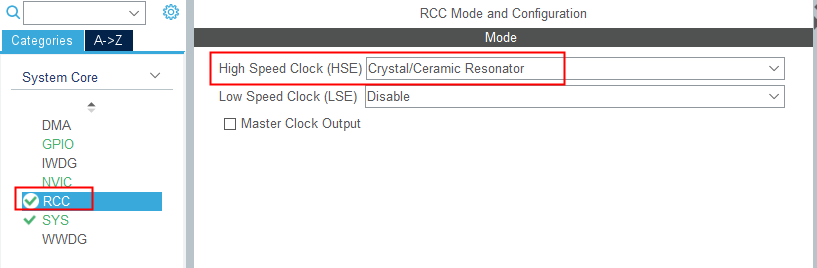
RCC配置
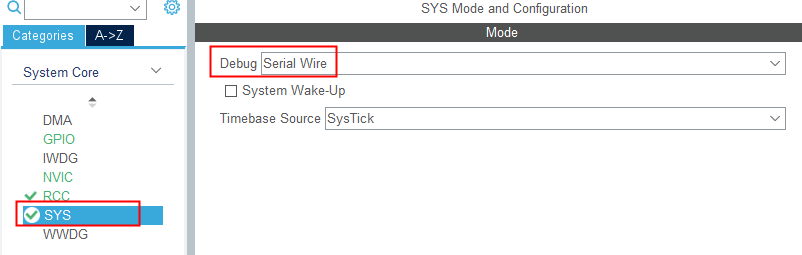
SYS配置
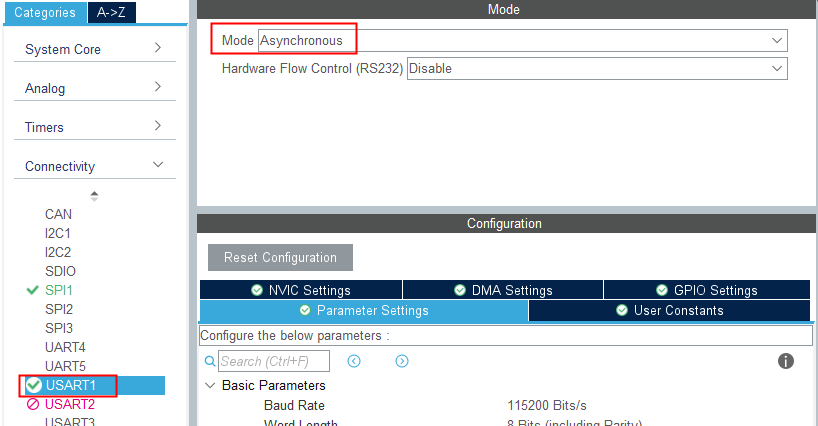
USART1配置,用于输出调试信息,参数默认
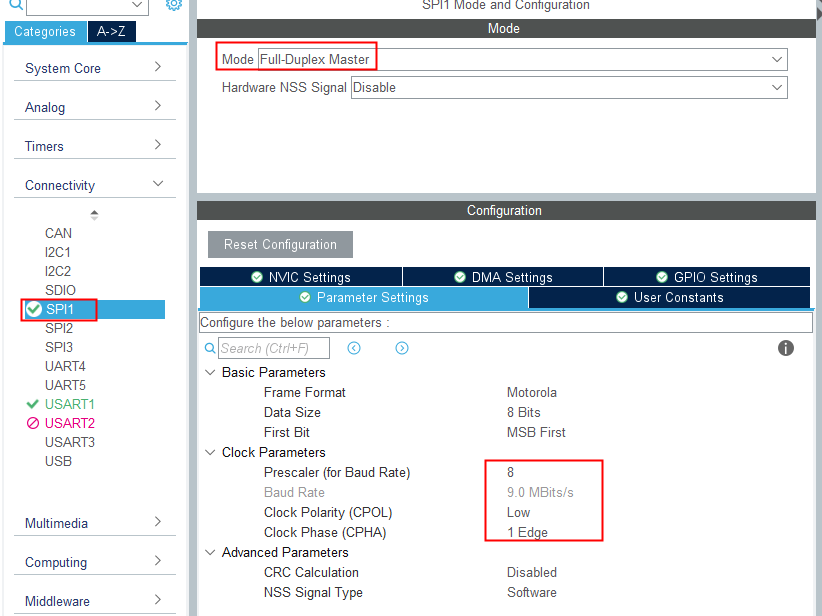
SPI1配置,具体参数如下
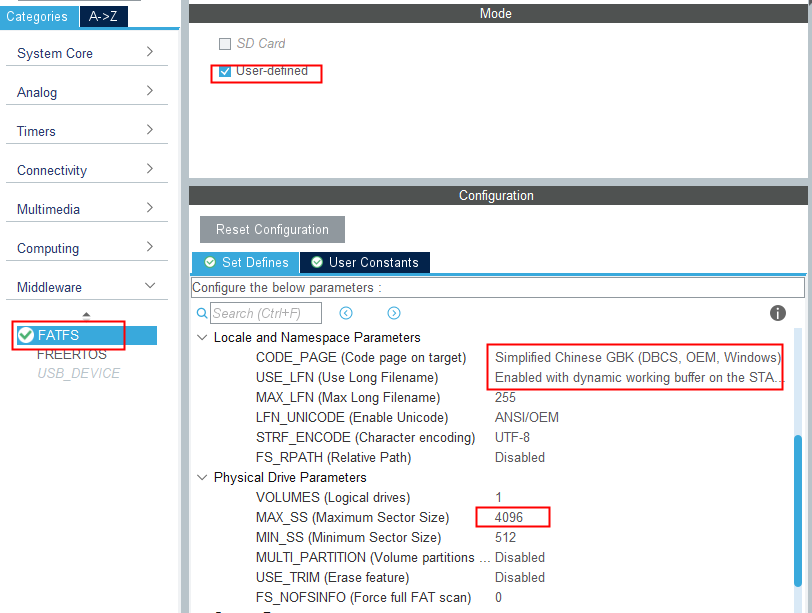
FATFS配置,参数如下
时钟配置

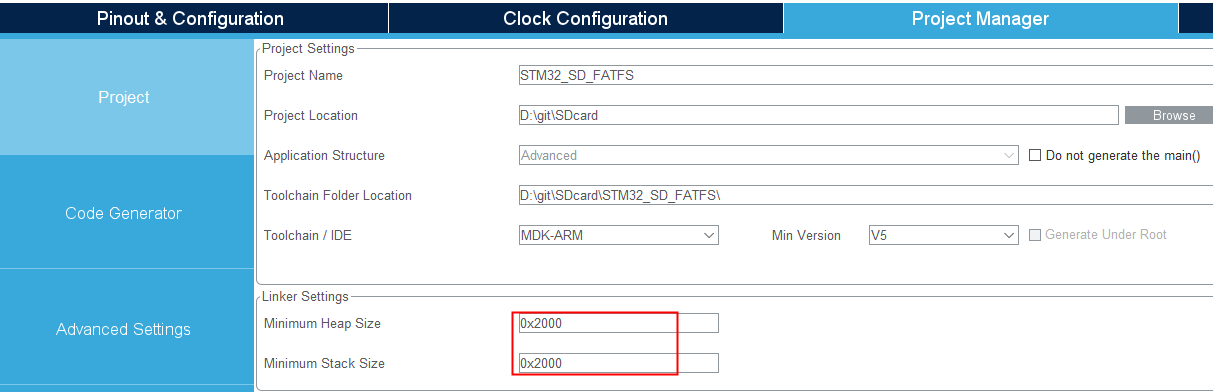
工程配置,默认的堆栈改大一点
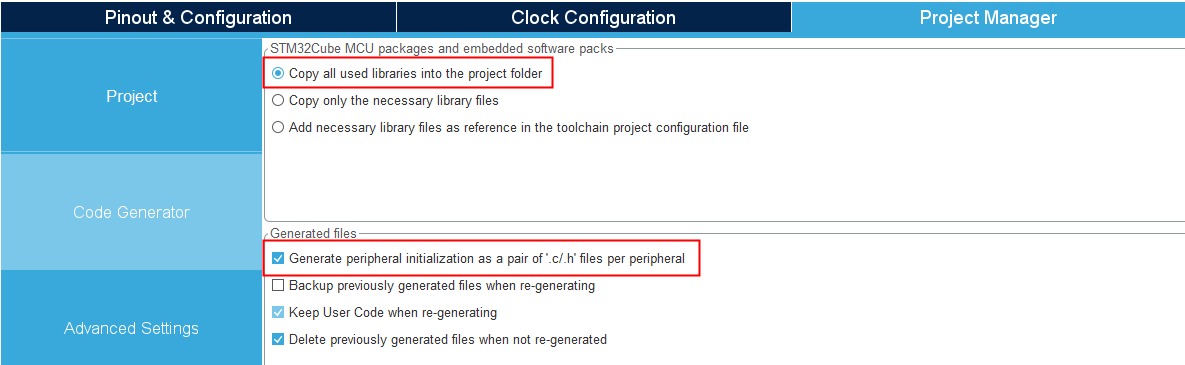
生成工程,点击GENERATE CODE,生成代码

三、代码介绍
串口重映射,printf,方便输出调试信息
usart.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
#include "stdio.h"
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE//串口重定向
{
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END 1 */
spi.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file spi.c
* @brief This file provides code for the configuration
* of the SPI instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "spi.h"
/* USER CODE BEGIN 0 */
#include "main.h"
/* USER CODE END 0 */
SPI_HandleTypeDef hspi1;
/* SPI1 init function */
void MX_SPI1_Init(void)
{
/* USER CODE BEGIN SPI1_Init 0 */
/* USER CODE END SPI1_Init 0 */
/* USER CODE BEGIN SPI1_Init 1 */
/* USER CODE END SPI1_Init 1 */
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_8;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI1_Init 2 */
/* USER CODE END SPI1_Init 2 */
}
void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(spiHandle->Instance==SPI1)
{
/* USER CODE BEGIN SPI1_MspInit 0 */
/* USER CODE END SPI1_MspInit 0 */
/* SPI1 clock enable */
__HAL_RCC_SPI1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**SPI1 GPIO Configuration
PA5 ------> SPI1_SCK
PA6 ------> SPI1_MISO
PA7 ------> SPI1_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN SPI1_MspInit 1 */
/* USER CODE END SPI1_MspInit 1 */
}
}
void HAL_SPI_MspDeInit(SPI_HandleTypeDef* spiHandle)
{
if(spiHandle->Instance==SPI1)
{
/* USER CODE BEGIN SPI1_MspDeInit 0 */
/* USER CODE END SPI1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_SPI1_CLK_DISABLE();
/**SPI1 GPIO Configuration
PA5 ------> SPI1_SCK
PA6 ------> SPI1_MISO
PA7 ------> SPI1_MOSI
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7);
/* USER CODE BEGIN SPI1_MspDeInit 1 */
/* USER CODE END SPI1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
//SPI速度设置函数
//SPI速度=fAPB1/分频系数
//@ref SPI_BaudRate_Prescaler:SPI_BAUDRATEPRESCALER_2~SPI_BAUDRATEPRESCALER_2 256
//fAPB1时钟一般为42Mhz:
void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性
__HAL_SPI_DISABLE(&hspi1); //关闭SPI
hspi1.Instance->CR1&=0XFFC7; //位3-5清零,用来设置波特率
hspi1.Instance->CR1|=SPI_BaudRatePrescaler;//设置SPI速度
__HAL_SPI_ENABLE(&hspi1); //使能SPI
}
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI1_ReadWriteByte(u8 TxData)
{
u8 Rxdata;
HAL_SPI_TransmitReceive(&hspi1,&TxData,&Rxdata,1, 1000);
return Rxdata; //返回收到的数据
}
/* USER CODE END 1 */
MMC_SD.c
#include "mmc_sd.h"
#include "spi.h"
#include "usart.h"
u8 SD_Type=0;//SD卡的类型
移植修改区///
//移植时候的接口
//data:要写入的数据
//返回值:读到的数据
u8 SD_SPI_ReadWriteByte(u8 data)
{
return SPI1_ReadWriteByte(data);
}
//SD卡初始化的时候,需要低速
void SD_SPI_SpeedLow(void)
{
SPI1_SetSpeed(SPI_BAUDRATEPRESCALER_256);//设置到低速模式
}
//SD卡正常工作的时候,可以高速了
void SD_SPI_SpeedHigh(void)
{
SPI1_SetSpeed(SPI_BAUDRATEPRESCALER_2);//设置到高速模式
}
//SPI硬件层初始化
void SD_SPI_Init(void)
{
//设置硬件上与SD卡相关联的控制引脚输出
//禁止其他外设(NRF/W25Q64)对SD卡产生影响
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟
//PA2.3.4
GPIO_Initure.Pin=GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET);
MX_SPI1_Init();
SD_CS_1;
}
///
//取消选择,释放SPI总线
void SD_DisSelect(void)
{
SD_CS_1;
SD_SPI_ReadWriteByte(0xff);//提供额外的8个时钟
}
//选择sd卡,并且等待卡准备OK
//返回值:0,成功;1,失败;
u8 SD_Select(void)
{
SD_CS_0;
if(SD_WaitReady()==0)return 0;//等待成功
SD_DisSelect();
return 1;//等待失败
}
//等待卡准备好
//返回值:0,准备好了;其他,错误代码
u8 SD_WaitReady(void)
{
u32 t=0;
do
{
if(SD_SPI_ReadWriteByte(0XFF)==0XFF)return 0;//OK
t++;
}while(t<0XFFFFFF);//等待
return 1;
}
//等待SD卡回应
//Response:要得到的回应值
//返回值:0,成功得到了该回应值
// 其他,得到回应值失败
u8 SD_GetResponse(u8 Response)
{
u16 Count=0xFFFF;//等待次数
while ((SD_SPI_ReadWriteByte(0XFF)!=Response)&&Count)Count--;//等待得到准确的回应
if (Count==0)return MSD_RESPONSE_FAILURE;//得到回应失败
else return MSD_RESPONSE_NO_ERROR;//正确回应
}
//从sd卡读取一个数据包的内容
//buf:数据缓存区
//len:要读取的数据长度.
//返回值:0,成功;其他,失败;
u8 SD_RecvData(u8*buf,u16 len)
{
if(SD_GetResponse(0xFE))return 1;//等待SD卡发回数据起始令牌0xFE
while(len--)//开始接收数据
{
*buf=SPI1_ReadWriteByte(0xFF);
buf++;
}
//下面是2个伪CRC(dummy CRC)
SD_SPI_ReadWriteByte(0xFF);
SD_SPI_ReadWriteByte(0xFF);
return 0;//读取成功
}
//向sd卡写入一个数据包的内容 512字节
//buf:数据缓存区
//cmd:指令
//返回值:0,成功;其他,失败;
u8 SD_SendBlock(u8*buf,u8 cmd)
{
u16 t;
if(SD_WaitReady())return 1;//等待准备失效
SD_SPI_ReadWriteByte(cmd);
if(cmd!=0XFD)//不是结束指令
{
for(t=0;t<512;t++)SPI1_ReadWriteByte(buf[t]);//提高速度,减少函数传参时间
SD_SPI_ReadWriteByte(0xFF);//忽略crc
SD_SPI_ReadWriteByte(0xFF);
t=SD_SPI_ReadWriteByte(0xFF);//接收响应
if((t&0x1F)!=0x05)return 2;//响应错误
}
return 0;//写入成功
}
//向SD卡发送一个命令
//输入: u8 cmd 命令
// u32 arg 命令参数
// u8 crc crc校验值
//返回值:SD卡返回的响应
u8 SD_SendCmd(u8 cmd, u32 arg, u8 crc)
{
u8 r1;
u8 Retry=0;
SD_DisSelect();//取消上次片选
if(SD_Select())return 0XFF;//片选失效
//发送
SD_SPI_ReadWriteByte(cmd | 0x40);//分别写入命令
SD_SPI_ReadWriteByte(arg >> 24);
SD_SPI_ReadWriteByte(arg >> 16);
SD_SPI_ReadWriteByte(arg >> 8);
SD_SPI_ReadWriteByte(arg);
SD_SPI_ReadWriteByte(crc);
if(cmd==CMD12)SD_SPI_ReadWriteByte(0xff);//Skip a stuff byte when stop reading
//等待响应,或超时退出
Retry=0X1F;
do
{
r1=SD_SPI_ReadWriteByte(0xFF);
}while((r1&0X80) && Retry--);
//返回状态值
return r1;
}
//获取SD卡的CID信息,包括制造商信息
//输入: u8 *cid_data(存放CID的内存,至少16Byte)
//返回值:0:NO_ERR
// 1:错误
u8 SD_GetCID(u8 *cid_data)
{
u8 r1;
//发CMD10命令,读CID
r1=SD_SendCmd(CMD10,0,0x01);
if(r1==0x00)
{
r1=SD_RecvData(cid_data,16);//接收16个字节的数据
}
SD_DisSelect();//取消片选
if(r1)return 1;
else return 0;
}
//获取SD卡的CSD信息,包括容量和速度信息
//输入:u8 *cid_data(存放CID的内存,至少16Byte)
//返回值:0:NO_ERR
// 1:错误
u8 SD_GetCSD(u8 *csd_data)
{
u8 r1;
r1=SD_SendCmd(CMD9,0,0x01);//发CMD9命令,读CSD
if(r1==0)
{
r1=SD_RecvData(csd_data, 16);//接收16个字节的数据
}
SD_DisSelect();//取消片选
if(r1)return 1;
else return 0;
}
//获取SD卡的总扇区数(扇区数)
//返回值:0: 取容量出错
// 其他:SD卡的容量(扇区数/512字节)
//每扇区的字节数必为512,因为如果不是512,则初始化不能通过.
u32 SD_GetSectorCount(void)
{
u8 csd[16];
u32 Capacity;
u8 n;
u16 csize;
//取CSD信息,如果期间出错,返回0
if(SD_GetCSD(csd)!=0) return 0;
//如果为SDHC卡,按照下面方式计算
if((csd[0]&0xC0)==0x40) //V2.00的卡
{
csize = csd[9] + ((u16)csd[8] << 8) + 1;
Capacity = (u32)csize << 10;//得到扇区数
}else//V1.XX的卡
{
n = (csd[5] & 15) + ((csd[10] & 128) >> 7) + ((csd[9] & 3) << 1) + 2;
csize = (csd[8] >> 6) + ((u16)csd[7] << 2) + ((u16)(csd[6] & 3) << 10) + 1;
Capacity= (u32)csize << (n - 9);//得到扇区数
}
return Capacity;
}
//初始化SD卡
u8 SD_Init(void)
{
u8 r1; // 存放SD卡的返回值
u16 retry; // 用来进行超时计数
u8 buf[4];
u16 i;
SD_SPI_Init(); //初始化IO
SD_SPI_SpeedLow(); //设置到低速模式
for(i=0;i<10;i++)SD_SPI_ReadWriteByte(0XFF);//发送最少74个脉冲
retry=20;
do
{
r1=SD_SendCmd(CMD0,0,0x95);//进入IDLE状态
}while((r1!=0X01) && retry--);
SD_Type=0;//默认无卡
if(r1==0X01)
{
if(SD_SendCmd(CMD8,0x1AA,0x87)==1)//SD V2.0
{
for(i=0;i<4;i++)buf[i]=SD_SPI_ReadWriteByte(0XFF); //Get trailing return value of R7 resp
if(buf[2]==0X01&&buf[3]==0XAA)//卡是否支持2.7~3.6V
{
retry=0XFFFE;
do
{
SD_SendCmd(CMD55,0,0X01); //发送CMD55
r1=SD_SendCmd(CMD41,0x40000000,0X01);//发送CMD41
}while(r1&&retry--);
if(retry&&SD_SendCmd(CMD58,0,0X01)==0)//鉴别SD2.0卡版本开始
{
for(i=0;i<4;i++)buf[i]=SD_SPI_ReadWriteByte(0XFF);//得到OCR值
if(buf[0]&0x40)SD_Type=SD_TYPE_V2HC; //检查CCS
else SD_Type=SD_TYPE_V2;
}
}
}else//SD V1.x/ MMC V3
{
SD_SendCmd(CMD55,0,0X01); //发送CMD55
r1=SD_SendCmd(CMD41,0,0X01); //发送CMD41
if(r1<=1)
{
SD_Type=SD_TYPE_V1;
retry=0XFFFE;
do //等待退出IDLE模式
{
SD_SendCmd(CMD55,0,0X01); //发送CMD55
r1=SD_SendCmd(CMD41,0,0X01);//发送CMD41
}while(r1&&retry--);
}else//MMC卡不支持CMD55+CMD41识别
{
SD_Type=SD_TYPE_MMC;//MMC V3
retry=0XFFFE;
do //等待退出IDLE模式
{
r1=SD_SendCmd(CMD1,0,0X01);//发送CMD1
}while(r1&&retry--);
}
if(retry==0||SD_SendCmd(CMD16,512,0X01)!=0)SD_Type=SD_TYPE_ERR;//错误的卡
}
}
SD_DisSelect();//取消片选
SD_SPI_SpeedHigh();//高速
if(SD_Type)return 0;
else if(r1)return r1;
return 0xaa;//其他错误
}
//读SD卡
//buf:数据缓存区
//sector:扇区
//cnt:扇区数
//返回值:0,ok;其他,失败.
u8 SD_ReadDisk(u8*buf,u32 sector,u8 cnt)
{
u8 r1;
if(SD_Type!=SD_TYPE_V2HC)sector <<= 9;//转换为字节地址
if(cnt==1)
{
r1=SD_SendCmd(CMD17,sector,0X01);//读命令
if(r1==0)//指令发送成功
{
r1=SD_RecvData(buf,512);//接收512个字节
}
}else
{
r1=SD_SendCmd(CMD18,sector,0X01);//连续读命令
do
{
r1=SD_RecvData(buf,512);//接收512个字节
buf+=512;
}while(--cnt && r1==0);
SD_SendCmd(CMD12,0,0X01); //发送停止命令
}
SD_DisSelect();//取消片选
return r1;//
}
//写SD卡
//buf:数据缓存区
//sector:起始扇区
//cnt:扇区数
//返回值:0,ok;其他,失败.
u8 SD_WriteDisk(u8*buf,u32 sector,u8 cnt)
{
u8 r1;
if(SD_Type!=SD_TYPE_V2HC)sector *= 512;//转换为字节地址
if(cnt==1)
{
r1=SD_SendCmd(CMD24,sector,0X01);//读命令
if(r1==0)//指令发送成功
{
r1=SD_SendBlock(buf,0xFE);//写512个字节
}
}else
{
if(SD_Type!=SD_TYPE_MMC)
{
SD_SendCmd(CMD55,0,0X01);
SD_SendCmd(CMD23,cnt,0X01);//发送指令
}
r1=SD_SendCmd(CMD25,sector,0X01);//连续读命令
if(r1==0)
{
do
{
r1=SD_SendBlock(buf,0xFC);//接收512个字节
buf+=512;
}while(--cnt && r1==0);
r1=SD_SendBlock(0,0xFD);//接收512个字节
}
}
SD_DisSelect();//取消片选
return r1;
}
MMC_SD.h
#ifndef _MMC_SD_H_
#define _MMC_SD_H_
#include "stm32f1xx_hal.h"
#include "main.h"
#define SD_CS_1 HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET)
#define SD_CS_0 HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET)
// SD卡类型定义
#define SD_TYPE_ERR 0X00
#define SD_TYPE_MMC 0X01
#define SD_TYPE_V1 0X02
#define SD_TYPE_V2 0X04
#define SD_TYPE_V2HC 0X06
// SD卡指令表
#define CMD0 0 //卡复位
#define CMD1 1
#define CMD8 8 //命令8 ,SEND_IF_COND
#define CMD9 9 //命令9 ,读CSD数据
#define CMD10 10 //命令10,读CID数据
#define CMD12 12 //命令12,停止数据传输
#define CMD16 16 //命令16,设置SectorSize 应返回0x00
#define CMD17 17 //命令17,读sector
#define CMD18 18 //命令18,读Multi sector
#define CMD23 23 //命令23,设置多sector写入前预先擦除N个block
#define CMD24 24 //命令24,写sector
#define CMD25 25 //命令25,写Multi sector
#define CMD41 41 //命令41,应返回0x00
#define CMD55 55 //命令55,应返回0x01
#define CMD58 58 //命令58,读OCR信息
#define CMD59 59 //命令59,使能/禁止CRC,应返回0x00
//数据写入回应字意义
#define MSD_DATA_OK 0x05
#define MSD_DATA_CRC_ERROR 0x0B
#define MSD_DATA_WRITE_ERROR 0x0D
#define MSD_DATA_OTHER_ERROR 0xFF
//SD卡回应标记字
#define MSD_RESPONSE_NO_ERROR 0x00
#define MSD_IN_IDLE_STATE 0x01
#define MSD_ERASE_RESET 0x02
#define MSD_ILLEGAL_COMMAND 0x04
#define MSD_COM_CRC_ERROR 0x08
#define MSD_ERASE_SEQUENCE_ERROR 0x10
#define MSD_ADDRESS_ERROR 0x20
#define MSD_PARAMETER_ERROR 0x40
#define MSD_RESPONSE_FAILURE 0xFF
//这部分应根据具体的连线来修改!
//MiniSTM32开发板使用的是PA3作为SD卡的CS脚.
#define SD_CS PAout(3) //SD卡片选引脚
extern u8 SD_Type; //SD卡的类型
//函数申明区
u8 SD_SPI_ReadWriteByte(u8 data);
void SD_SPI_SpeedLow(void);
void SD_SPI_SpeedHigh(void);
u8 SD_WaitReady(void); //等待SD卡准备
u8 SD_GetResponse(u8 Response); //获得相应
u8 SD_Init(void); //初始化
u8 SD_ReadDisk(u8*buf,u32 sector,u8 cnt); //读块
u8 SD_WriteDisk(u8*buf,u32 sector,u8 cnt); //写块
u32 SD_GetSectorCount(void); //读扇区数
u8 SD_GetCID(u8 *cid_data); //读SD卡CID
u8 SD_GetCSD(u8 *csd_data); //读SD卡CSD
#endif
user_diskio.c 实现FATFS读写SD卡的主要代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file user_diskio.c
* @brief This file includes a diskio driver skeleton to be completed by the user.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
#ifdef USE_OBSOLETE_USER_CODE_SECTION_0
/*
* Warning: the user section 0 is no more in use (starting from CubeMx version 4.16.0)
* To be suppressed in the future.
* Kept to ensure backward compatibility with previous CubeMx versions when
* migrating projects.
* User code previously added there should be copied in the new user sections before
* the section contents can be deleted.
*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
#endif
/* USER CODE BEGIN DECL */
/* Includes ------------------------------------------------------------------*/
#include <string.h>
#include "ff_gen_drv.h"
#include "MMC_SD.h"
#define SD_CARD 0
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Disk status */
static volatile DSTATUS Stat = STA_NOINIT;
/* USER CODE END DECL */
/* Private function prototypes -----------------------------------------------*/
DSTATUS USER_initialize (BYTE pdrv);
DSTATUS USER_status (BYTE pdrv);
DRESULT USER_read (BYTE pdrv, BYTE *buff, DWORD sector, UINT count);
#if _USE_WRITE == 1
DRESULT USER_write (BYTE pdrv, const BYTE *buff, DWORD sector, UINT count);
#endif /* _USE_WRITE == 1 */
#if _USE_IOCTL == 1
DRESULT USER_ioctl (BYTE pdrv, BYTE cmd, void *buff);
#endif /* _USE_IOCTL == 1 */
Diskio_drvTypeDef USER_Driver =
{
USER_initialize,
USER_status,
USER_read,
#if _USE_WRITE
USER_write,
#endif /* _USE_WRITE == 1 */
#if _USE_IOCTL == 1
USER_ioctl,
#endif /* _USE_IOCTL == 1 */
};
/* Private functions ---------------------------------------------------------*/
/**
* @brief Initializes a Drive
* @param pdrv: Physical drive number (0..)
* @retval DSTATUS: Operation status
*/
DSTATUS USER_initialize (
BYTE pdrv /* Physical drive nmuber to identify the drive */
)
{
/* USER CODE BEGIN INIT */
Stat = RES_OK;
return Stat;
/* USER CODE END INIT */
}
/**
* @brief Gets Disk Status
* @param pdrv: Physical drive number (0..)
* @retval DSTATUS: Operation status
*/
DSTATUS USER_status (
BYTE pdrv /* Physical drive number to identify the drive */
)
{
/* USER CODE BEGIN STATUS */
u8 res=0;
switch(pdrv)
{
case SD_CARD: //SD卡
res=SD_Init(); //SD卡初始化
break;
default:
res=1;
}
if(res)return STA_NOINIT;
else return 0; //初始化成功
/* USER CODE END STATUS */
}
/**
* @brief Reads Sector(s)
* @param pdrv: Physical drive number (0..)
* @param *buff: Data buffer to store read data
* @param sector: Sector address (LBA)
* @param count: Number of sectors to read (1..128)
* @retval DRESULT: Operation result
*/
DRESULT USER_read (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
BYTE *buff, /* Data buffer to store read data */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to read */
)
{
/* USER CODE BEGIN READ */
u8 res=0;
if (!count)return RES_PARERR;//count不能等于0,否则返回参数错误
switch(pdrv)
{
case SD_CARD://SD卡
res=SD_ReadDisk(buff,sector,count);
while(res)//读出错
{
SD_Init(); //重新初始化SD卡
res=SD_ReadDisk(buff,sector,count);
}
break;
default:
res=1;
}
//处理返回值,将SPI_SD_driver.c的返回值转成ff.c的返回值
if(res==0x00)return RES_OK;
else return RES_ERROR;
/* USER CODE END READ */
}
/**
* @brief Writes Sector(s)
* @param pdrv: Physical drive number (0..)
* @param *buff: Data to be written
* @param sector: Sector address (LBA)
* @param count: Number of sectors to write (1..128)
* @retval DRESULT: Operation result
*/
#if _USE_WRITE == 1
DRESULT USER_write (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
const BYTE *buff, /* Data to be written */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to write */
)
{
/* USER CODE BEGIN WRITE */
/* USER CODE HERE */
u8 res=0;
if (!count)return RES_PARERR;//count不能等于0,否则返回参数错误
switch(pdrv)
{
case SD_CARD://SD卡
res=SD_WriteDisk((u8*)buff,sector,count);
while(res)//写出错
{
SD_Init(); //重新初始化SD卡
res=SD_WriteDisk((u8*)buff,sector,count);
}
break;
default:
res=1;
}
//处理返回值,将SPI_SD_driver.c的返回值转成ff.c的返回值
if(res == 0x00)return RES_OK;
else return RES_ERROR;
/* USER CODE END WRITE */
}
#endif /* _USE_WRITE == 1 */
/**
* @brief I/O control operation
* @param pdrv: Physical drive number (0..)
* @param cmd: Control code
* @param *buff: Buffer to send/receive control data
* @retval DRESULT: Operation result
*/
#if _USE_IOCTL == 1
DRESULT USER_ioctl (
BYTE pdrv, /* Physical drive nmuber (0..) */
BYTE cmd, /* Control code */
void *buff /* Buffer to send/receive control data */
)
{
/* USER CODE BEGIN IOCTL */
DRESULT res;
if(pdrv==SD_CARD)//SD卡
{
switch(cmd)
{
case CTRL_SYNC:
res = RES_OK;
break;
case GET_SECTOR_SIZE:
*(DWORD*)buff = 512;
res = RES_OK;
break;
case GET_BLOCK_SIZE:
*(WORD*)buff = 8;
res = RES_OK;
break;
case GET_SECTOR_COUNT:
*(DWORD*)buff = SD_GetSectorCount();
res = RES_OK;
break;
default:
res = RES_PARERR;
break;
}
}
else res=RES_ERROR;//其他的不支持
return res;
/* USER CODE END IOCTL */
}
#endif /* _USE_IOCTL == 1 */
main.c 测试文件系统读写SD卡
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "fatfs.h"
#include "spi.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
#include "ff.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
FRESULT f_res;
UINT bw;
BYTE ReadBuffer[1024]={0};
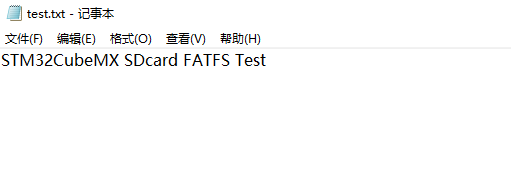
BYTE WriteBuffer[]= "STM32CubeMX SDcard FATFS Test\r\n";
void mount_disk(void)
{
f_res = f_mount(&USERFatFS, USERPath, 0);
}
void create_file(void)
{
printf("write data is : %s\r\n",WriteBuffer);
f_res = f_open(&USERFile, "test.txt", FA_OPEN_ALWAYS | FA_WRITE);
f_res = f_write(&USERFile, WriteBuffer, sizeof(WriteBuffer), &bw);
f_res = f_close(&USERFile);
}
void read_file(void)
{
f_res = f_open(&USERFile, "test.txt", FA_READ);
f_res = f_read(&USERFile, ReadBuffer, sizeof(WriteBuffer), &bw);
printf("read data is : %s\r\n",ReadBuffer);
f_res = f_close(&USERFile);
}
void umount_disk(void)
{
f_res = f_mount(NULL, USERPath, 0);
}
void FatfsTest(void)
{
mount_disk(); //挂载SD卡
create_file();//创建TXT文件
read_file(); //读取文件内容并放到ReadBuffer中
umount_disk();//卸载SD卡
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI1_Init();
MX_USART1_UART_Init();
MX_FATFS_Init();
/* USER CODE BEGIN 2 */
printf("\r\n ****** SDcard FatFs Example ******\r\n\r\n");
HAL_Delay (500);
FatfsTest();//文件系统测试
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
四、程序运行截图
串口调试助手输出信息:
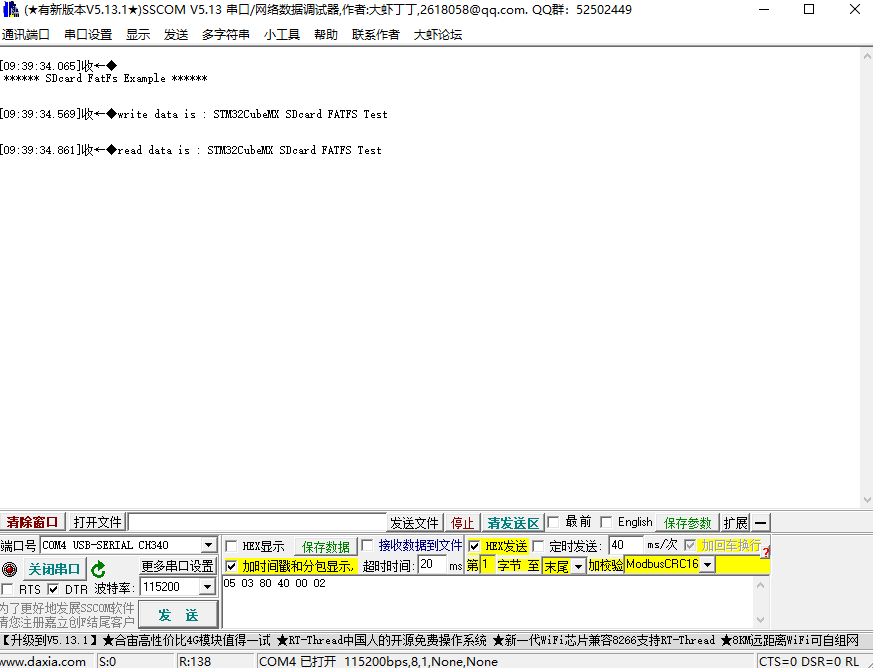
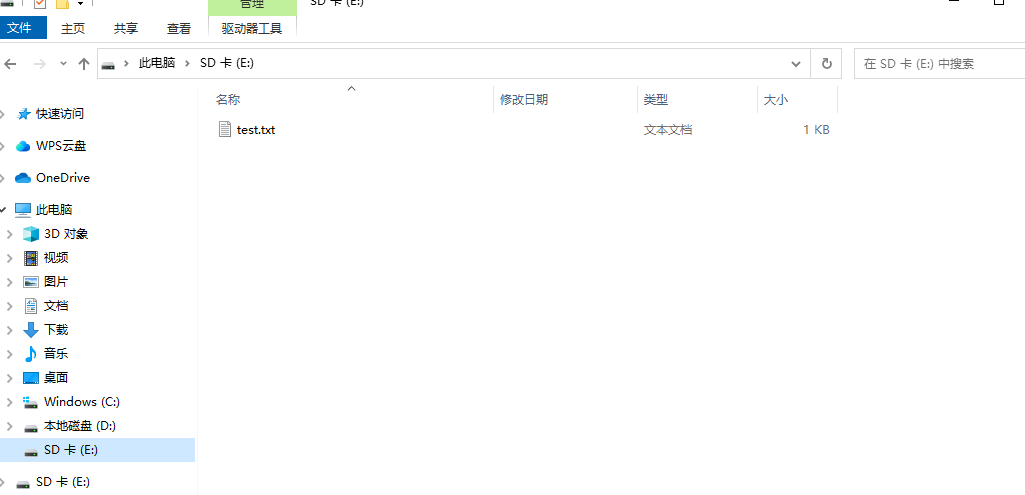
将SD卡插在电脑上,或者通过读卡器连接到电脑上,SD卡截图: