引言
放射治疗 CT 模拟机(computed tomography simulators, CT-Sim)由带有平板床面的 CT 扫描仪、用于患者定位与体表标记的外部激光系统、CT 模拟软件以及各种硬拷贝输出设备组成。CT 模拟机为放射治疗计划设计提供了患者肿瘤、正常组织与危及器官的影像解剖信息,其机械性能和图像质量引起的误差有可能作为系统误差存在于患者的整个放射治疗过程[1]。
CT 模拟机质量控制(以下简称质控)的目的是保证模拟定位过程的安全与放射治疗靶区及其周围重要器官的精确定位,以及提供放疗计划剂量计算所需的准确数据。质控包括机械性能、图像质量、定位流程和辐射防护共四个方面。
本指南依据已发布的国内外相关标准,所列并不详尽,每一个临床单位应根据自身情况建立适合本单位的质控程序。
1.范围
本指南规定了放射治疗 CT 模拟机的质控项目与要求。本指南提出的检测项目为推荐性,容差标准为最低要求。各机构可根据实际情况适当调整测试内容,并根据开展的放疗技术严格容差范围。
本指南适用于中华人民共和国内使用 CT 模拟机的医疗机构。
2.规范性引用文件
下列文件对于本指南的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本指南。凡是不注日期的引用文件,其最新版本(包括所有修改单)适用于本指南。
GBZ 165-2012 X 射线计算机断层摄影放射防护要求
GB 17589-2011 X 射线计算机断层摄影装置质量保证检测规范
GBZ 179-2006 医疗照射放射防护基本要求
GBZ/T 180-2006 医用 X 射线 CT 机房的辐射屏蔽规范
JJG 961-2017 医用诊断螺旋计算机断层摄影装置(CT)X 射线辐射源
3.术语和定义
下列术语和定义适用于本指南。
3.1 CT 模拟机 computed tomography simulator, CT-Sim
以诊断级 CT 机为基础(通常具有较大机架孔径),并配置有与放射治疗匹配的平板扫描床、外激光定位系统及虚拟定位软件的放疗专用模拟定位系统。
3.2 CT 模拟定位扫描 CT simulation positioning scanning
选取适当的治疗体位和体位固定方式,扫描获取患者该体位的 CT 断层图像,重建图像用于放射治疗计划的 3D 假体信息,并借助激光系统的标记信息建立假体参考坐标系的过程。
3.3 机架激光定位系统 gantry lasers positioning system
位于机架内用于定义扫描中心平面的激光系统,由机架内激光灯和机架外壳顶部激光灯组成。
3.4 外激光定位系统 external lasers positioning system
用于患者体表标记和定位的独立激光系统,由 1 组顶激光灯和 2 组墙上激光灯组成。
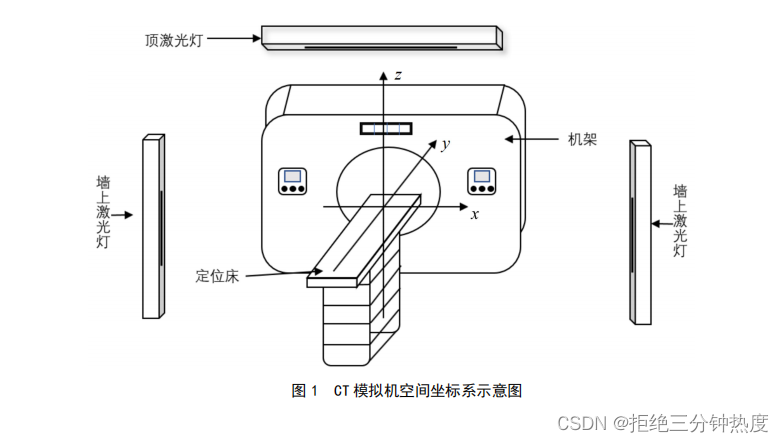
3.5 CT-Sim 空间坐标系
建议 CT-Sim 空间坐标系与治疗计划的坐标系、放射治疗机的坐标系相一致,如图 1 所示。垂直于x 轴的为矢状面,垂直于 y 轴的为横断面,垂直于 z 轴的为冠状面。
3.6 CT 值 CT number
CT 影像中每个像素对应体素的 X 射线的衰减系数。利用式(1)将测得的衰减值,按照国际统一的 Hounsfield 标度转化为 CT 值,CT 值通常用 Hounsfield 作为单位,简称 HU。
3.7 灵敏度剖面曲线 sensitivity profile
CT 系统相关响应量作为垂直于断层平面的直线上位置的函数。
3.8 剂量剖面曲线 dose profile
在标准横断面中心轴线上,剂量随其位置分布的相关函数。
3.9 标称层厚 nominal tomography slice thickness
CT-Sim 控制面板上选定并指示的层厚。
3.10 重建层厚 reconstructed slice thickness
扫描野中心处成像灵敏度剖面曲线的半值全宽。
3.11 CT 剂量指数 CT dose index, CTDI
沿着标准横断层面中心轴线从-50 mm 到+50 mm 对剂量剖面曲线的积分,除以标称层厚与单次扫描产生断层数𝑁的乘积,按式(2)计算,CTDI 即 CTDI100。
3.12 加权 CT 剂量指数 weighted CT dose index, CTDI௪
将模体中心点采集的CTDIଵ与外围各点采集的CTDIଵ的平均值进行加权求和,按式(3)计算。

3.13 图像噪声 image noise
在均匀物质影像中,给定区域 CT 值对其平均值的变异。其大小可以用感兴趣区中均匀物质的 CT值的标准差除以对比度标尺表示。
3.14 均匀性 uniformity
整个扫描野中,均匀物质影像 CT 值的一致性。
3.15 感兴趣区 region of interest, ROI
在影像中划定的像素区域。利用软件工具提供该区域的平均像素值和标准差等。
3.16 低对比度分辨率 low-contrast resolution
当物体与背景之间具有低对比度时,将一定大小的物体从背景中鉴别出来的能力。
3.17 高对比度分辨率 high-contrast resolution
物体与背景在衰减程度上的差异与噪声相比足够大的情况下,CT 成像时分辨不同物体的能力。
3.18 基线值 baseline value
设备功能参考值,验收或者状态检测合格后,由最初的稳定性检测得到的数值,或者由相应的标准给出的数值。
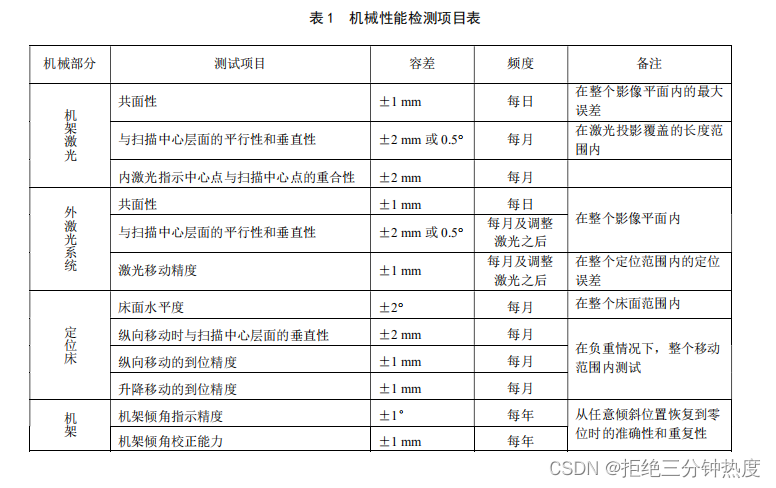
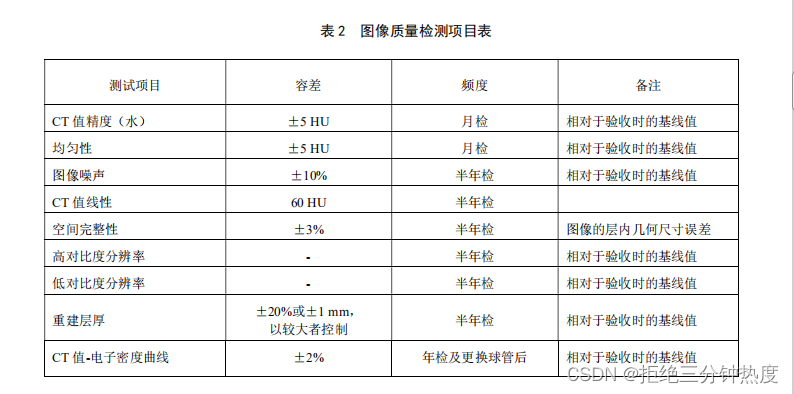
4 机械性能和图像质量检测项目及频度
表 1 所列内容为 CT 模拟机机械性能质量控制项目的容差和频度。表 2 所列内容为 CT 模拟机图像质量质控项目的容差和频度。
5 机械性能和图像质量的检测方法
5.1 一般性建议
建议临床物理师与厂家工程师共同参与设备的安装验收测试,按照厂家提供的验收手册和本科室的临床需求建立并保存好各项验收基线值。
建议安装验收测试时,首先确定扫描基准层面(即轴扫的中心层面)的位置与机架内激光指示的准确性,然后再依次展开定位床、机架、图像部分的检测。验收测试和周期性测试均建议尽可能减少重复摆放检测模体,避免因模体多次摆位引入的误差。
检测所选择的模体,如本指南中所提到的激光质控模体、图像质量检测模体等,应具备以下特征:表面需具有清晰的定位标记,内部嵌有特定形状的高密度物质且该高密度物质的形状、位置应与表面定位标记有严格的空间几何关系,表面与内部标记均应在扫描图像上清晰显示。实际操作时可根据测试原理和测试项目选择不同种类的模体。
5.2 机械性能检测
5.2.1 机架激光定位系统
机架激光定位系统的测试步骤如下:
a) 将机架激光打开,在整个成像范围内,将白纸垂直于冠状面(或矢状面或横断面)激光放置,遮挡一侧激光线的局部并评估两侧激光间最大偏差,依次检测机架激光的共面性,若超容差需进行调整;
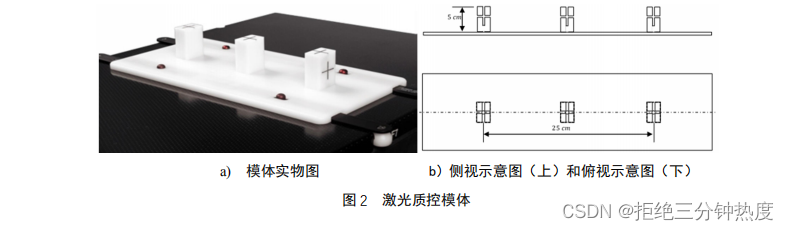
b) 将激光质控模体如图 2 所示摆放在定位床上(模体应放置在床的左右中分位置且垂直于床的长轴线),使得模体每一个模块的十字线与机架内激光对齐,设置此位置为床坐标 y=0;
c) 采用最小层厚、层间距进行轴扫;
d) 观察扫描图像,查看模体内标记(十字线)之间的位置关系,若内标记清晰地显示在同一个层面,则表示机架内横断面激光可准确指示扫描平面且冠状面激光与扫描平面垂直;若内标记同时清晰地出现在非零平面,则表示机架内横断面激光与扫描中心平面平行且冠状面激光与扫描平面垂直;若内标记显示在不同的层面或显示在同一层面的清晰程度不一样,则表示机架内横断面激光与扫描中心平面不平行且冠状面激光与扫描平面不垂直,超容差需进行调整;
e) 在扫描图像中找到中间模块十字线层面,调出扫描图像的网格标记线工具,观察模体十字中心与图像中心的重合性,以此判断内激光指示中心与扫描中心点的重合性;
f) 退床观察矢状面激光与中间模块十字线的一致性,以此判断矢状面激光与扫描平面的垂直性。
注:本指南中采用 Civco-MTTG66 激光质控模体,只是为了更清晰的介绍,也可采用与其功能相同的其他模体。
5.2.2 外激光定位系统
5.2.2.1 外激光共面性及移动精度
外激光共面性及移动精度的测试步骤如下:
a) 将外激光打开,在整个成像范围内,将白纸垂直冠状面(或矢状面或横断面)激光放置,遮挡一侧激光线的局部并评估两侧激光间最大偏差,依次检测每个外激光面的共面性,若超容差需进行调整;
b) 将钢尺固定在定位床上,依次检查各方向移动激光的移动精度。各方向检查的移动范围应尽可能包括临床使用的范围。
5.2.2.2 外激光垂直度与水平度检查
利用激光水平仪,检测横断面激光和矢状面激光的垂直度及冠状面激光的水平度。若不一致需进行调整。
5.2.2.3 外激光横断面与扫描中心平面的平行性
外激光横断面与扫描中心平面平行性的测试步骤如下:
a) 移动激光灯归零,将激光质控模体固定在定位床上,各模块十字线与外激光对齐,设置床坐标 y=0;
b) 用最小层厚、层间距进行轴扫;
c) 观察扫描图像,查看模体内标记(十字线)之间的位置关系,若内标记清晰地显示在同一个层面,则横断面激光与扫描中心平面平行;
d) 若内标记没有同时清晰出现在同一层面,说明横断面激光与扫描平面不平行。可利用模体几何参数和图像中 y 坐标偏差值计算平行性偏差。
注:以上测试步骤需保证定位床纵向移动与扫描中心层面的垂直性符合要求。
5.2.2.4 外激光矢状面、冠状面与扫描平面的垂直性
外激光矢状面、冠状面与扫描平面垂直性的测试步骤如下:
a) 移动激光灯归零,将激光质控模体固定在定位床上,使得各模块十字线与机架内激光对齐;
b) 退床一定距离至外激光定位层面,观察外激光是否对准模块各十字线,以此判断矢状面、冠状面激光与扫描平面的垂直性;
另外,也可采用如下测试步骤:
c) 将激光水平仪放置于定位床面,调整水平仪的激光线垂直于 CT 扫描平面(机架内横断面激光所指示的平面);
d) 分别检测外激光灯的矢状面和冠状面激光线与水平仪激光线的一致性。
注:以上测试步骤需保证机架激光的质控符合要求
5.2.3 定位床
5.2.3.1 定位床纵向移动与扫描中心层面的垂直性
定位床纵向移动与扫描中心层面的垂直性的测试步骤如下:
a) 在定位床长轴方向放置两个相距一定距离的铅点;
b) 微调铅点的位置,使床在纵向移动过程中两个铅点均能对齐机架内激光交叉点;
c) 扫描两个铅点,通过扫描图像上铅点的坐标值和定位床上两铅点的距离计算定位床纵向移动方向与扫描平面的垂直性;
另外,也可采用如下测试步骤:
d) 若已经验证外激光矢状面垂直于扫描平面,则可以在床板上沿着矢状面激光画一条标记线;
e) 进床或者出床过程中查看标记线与矢状面激光的一致性。
5.2.3.2 定位床水平度、伪影
在床空载和均匀负重70 kg条件下,利用水平仪进行测量。也可以进床轴向扫描,得到床板扫描图像,调出网格标记线工具,调节窗宽窗位,查看床板的上表面边缘与网格水平线是否平行或重合,若平行或重合,可判断定位床的水平度。同时,可得到床的扫描图像用于评估定位床是否含有任何产生伪影的物质。床面材料应为碳素纤维,或类似材料,以减少对射线的干扰。
5.2.3.3 纵向移动的到位精度
将长直尺沿y轴方向水平放置在定位床面上,横断面激光对准0刻度,进出床,读取刻度值,将尺子上的距离与CT-Sim指示仪数值作对比。
5.2.3.4 升降移动的到位精度
将长直尺垂直放置在床面上,冠状激光对准0刻度,升降床,观察激光灯在尺子上的升降距离并与指示仪数值对比。
5.2.4 机架倾斜角
5.2.4.1 机架倾角指示精度
机架倾角指示精度的测试步骤如下:
a) 将机架调零,激光质控模体固定在定位床扫描中心层面上,调节模体水平;
b) 采用最小层厚和层间距进行轴扫;
c) 查看扫描图像中是否清晰完整显示模体十字线的竖线,若清晰完整,则说明机架 0°指示准确;否则说明机架 0°指示存在偏差;
d) 确认机架 0°指示准确后,将胶片固定在 2 cm 至 4 cm 厚的固体水中;
e) 通过机架内激光,将固体水竖直放于 CT-Sim 扫描环内且垂直于扫描平面;
f) CT-Sim 在机架 0°薄层扫描固体水后,将机架向前、后两个方向,分别倾斜一定角度,用同样方法薄层扫描;CT-Sim 机架倾角可以通过量角器测量曝光的胶片获得,测得的结果与指示器读数的偏差为机架倾角的指示精度。
5.2.4.2 机架倾角校正能力
机架倾角校正能力的测试步骤如下:
a) 将坐标纸粘贴于定位床上,使机架内激光交于坐标纸某一点,做好标记;
b) 倾斜机架至一定角度后再重新恢复至机架 0°;
c) 观察机架内激光交叉点与坐标纸标记点的重合度,即反映 CT-Sim 机架的垂直校正能力。
5.3 图像质量检测
5.3.1 CT 值精度(水)、图像噪声和均匀性
CT 值精度(水)、图像噪声和均匀性的测试步骤如下:
a) 采用均质水圆柱形模体,薄层扫描,常用球管电压条件下扫描模体;
b) 圆柱形模体中心轴线与扫描层面垂直并处于扫描野中心,对圆柱中间层面进行扫描;
c) 在得到的图像中取一小块感兴趣区(ROI),计算该 ROI 的平均 CT 值,要求 CT 值精度的偏差为±5 HU,若超出需进行校准;
d) 选取图像中心大约 500 个像素点大小(约模体面积十分之一)的 ROI,测量该 ROI 的平均 CT值并计算标准偏差,其中平均 CT 值作为水 CT 值的测量值,标准偏差除以对比度标尺作为噪声的测量值 n,见(4)式;
e) 另外在扫描图像圆周相当于钟表时针 3 点,6 点,9 点,12 点的方向,距模体影像边沿约 10 mm处,选取大约 500 个像素点大小的 ROI,分别测量这四个 ROI 的平均 CT 值,其中与图像中心ROI 平均 CT 值的最大差值作为均匀性的测量值。
注:均匀性也可用 CT 值中最大值与最小值之差除以最大值与最小值之和来表示。
5.3.2 空间完整性
空间完整性的测试步骤如下:
a) 将模体进行扫描,测量图像相应模块的尺寸,如图 3 所示;
b) 与模体规格参数进行比对.
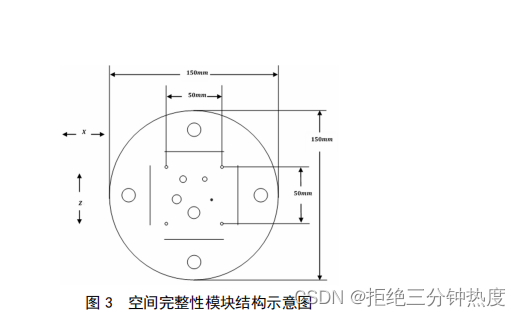
注:本指南中验证空间完整性采用 Catphan500 模体 CTP401 模块,只是为了更清晰的介绍,也可采用与其功能相同的其他模体。
5.3.3 CT 值线性
CT 值线性的测试步骤如下:
a) 采用嵌有 4 种以上不同 CT 值模块的模体,且模块 CT 值之差均应大于 100 HU;
b) 采用模体说明书指定扫描条件或分别使用临床常用头部和体部扫描条件分别扫描;
c) 在不同模块中心选取大约 100 个像素点大小的 ROI,测量各模块的平均 CT 值;
d) 按照模体说明书中标注的各种衰减模块在相应射线质条件下的衰减系数,计算得到各种模块在该射线质条件下的标称 CT 值;然后计算各 CT 值模块中,标称 CT 值与测量所得该模块的平均 CT 值之差,差值最大者记为 CT 值线性的评价参数。
5.3.4 高对比度分辨率
高对比度分辨率的测试步骤如下:
a) 仔细摆放模体水平。由于分辨率插件比较薄,同时扫描层厚也比较薄,如果未水平或是定位不准会产生扫描不全或漏扫描,影响结果的评价;
b) 采用临床常用的头部和体部扫描条件扫描模体的相应模块;
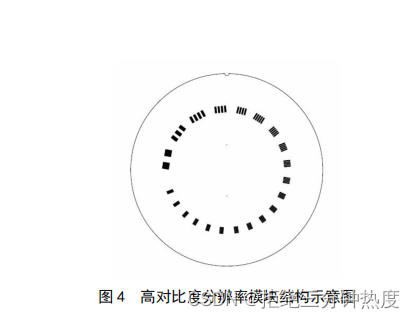
c) 得到图像后调节窗宽窗位使空间分辨率栅条显示清晰,如图 4 所示;
d) 评判能分辨的线对数。评判标准一般是:单条线不断,线与线之间不相连。
注:本指南中验证高对比度分辨采用 Catphan500 模体 CTP528 模块,只是为了更清晰的介绍,也可采用与其功能相同的其他模体。
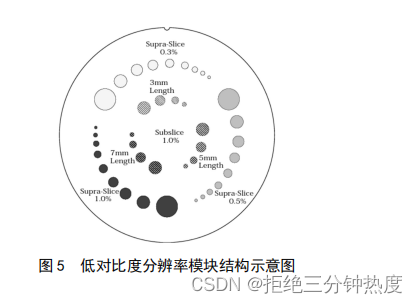
5.3.5 低对比度分辨率
低对比度分辨率的测试步骤如下:
a) 采用临床常用的头部和体部扫描条件扫描模体的相应模块;
b) 得到图像如图 5 所示。评判能够分辨出的不同对比度的圆柱形,并与验收时的基线值比对。
注:本指南中验证低对比度分辨率采用 Catphan500 模体 CTP515 模块,只是为了更清晰的介绍,也可采用与其功能相同的其他模体。
5.3.6 重建层厚偏差
重建层厚偏差的测试步骤如下:
a) 采用临床常用头部标准条件扫描模体,如图 6 所示;
b) 得到图像后将窗宽调整到最小,逐渐调高窗位,分别记录斜线消失的窗位和背景出现的窗位;
c) 把窗位调整至前面两个窗位的中间值,测得此时斜线的投影长度,乘以 0.42,得到实际层厚,验证其与标称层厚的偏差。
注 1:本指南中验证重建层厚偏差采用 Catphan500 模体 CTP401 模块,只是为了更清晰的介绍,也可采用与其功能相同的其他模体。
注 2:利用的是几何投影原理:金属丝在扫描影像上的长度(CT 值分布曲线的半宽高)乘以金属丝与扫描平面的夹角的正切(tanα=0.42),不同模体可能有所不同,请根据模体参数具体计算。

5.3.7 电子密度和 CT 值的转换
电子密度和 CT 值转换的测试步骤如下:
a) 将电子密度模体放置在扫描中心,确认模体中心轴垂直于扫描平面;
b) 在不同球管电压条件下进行扫描,获得图像后通过 DICOM 方式传入计划系统;
c) 对模体内所有材料都分别取一块 ROI,计算 ROI 各自的平均 CT 值;
d) 对照电子密度模体 CT 值表格,检查各材料的 CT 值偏差是否在允许范围内。
注:电子密度模体由固体水材料制作,带有 8 对电子密度已知的不同模拟材料组织圆柱插件。
6 流程质控
6.1 建立 CT 模拟定位操作规程
科室应针对不同肿瘤部位建立相应的放疗CT模拟定位规程,该规程应包括:
a) 体位说明,如:仰卧位或俯卧位、双手摆放位置等。采用的体位固定方式及体位固定装置应使患者在整个疗程中舒适并得到良好的固定效果,且不应产生任何伪影和图像失真;
b) 扫描条件,包括:扫描球管电压(kV)、电流(mA)、层厚、层间距、螺距、重建算法、扫描视野(field of view, FOV)、总扫描时间。建议在 CT 模拟机控制系统中预先设置相应的扫描协议,扫描协议的设置以获取最佳图像质量为参考标准,应至少每年检查一次各扫描协议的完整性并根据临床实践持续优化;
c) 扫描范围,一般应至少扫描预期靶区外上下方向 5 cm 以上,应完整扫描进行剂量-体积评估的危及器官(如:肺、肝等);若拟采用非共面射野计划时,应至少扫描预期靶区外上下方向 15cm 以上;若拟采用头顶野射野计划时,应扫描完整头部;
d) 造影剂使用,应明确不同部位的用量、流速、延迟时间等设置;应明确造影剂的使用所导致的计划系统剂量计算误差;应明确患者对造影剂过敏时的应急预案;
e) 体表标记,应尽量标记在预期靶区中心位置;建议除在患者体表标记三个激光指示点外,还应利用激光灯在患者体表标记一些长线,以便在摆位时明确患者与固定装置的相对位置,防止患者身体旋转、扭动等情况发生。
6.2 建立与呼吸运动管理相关的 CT 模拟定位操作规程
与呼吸运动管理相关的 CT 模拟定位主要包括:四维 CT 扫描、屏气状态下 CT 扫描、慢速 CT 扫描和门控 CT 扫描。其中自由呼吸状态下回顾式四维 CT 扫描和屏气状态下前瞻式 CT 扫描两种较为常见,具体规程应包括:
a) 病患宣教,回顾式四维 CT 扫描嘱患者尽量保持平静自然有规律的呼吸,前瞻式 CT 扫描根据临床需要嘱患者吸气末或呼气末一定时间内保持稳定的屏气状态;
b) 呼吸训练,选择合适体位固定后,使用呼吸监测设备对患者进行相应的呼吸训练以期达到扫描要求;
c) 病患筛选,如患者配合困难或经训练后不能满足呼吸要求,应在评估治疗可行性前提下慎重选择;
d) 呼吸信号获取,可选用红外感应、压力传感或光学体表监测等设备,放置在体表的传感器或光学体表监测门控点应尽可能反映真实呼吸状态。门控点常选取剑突下,压力传感器摆放位置应考虑患者的呼吸方式。另外,体表附属金属设备应尽量避开需要照射范围以免造成金属伪影;
e) 音视频辅助,可通过音视频呼吸信号反馈模块帮助患者保持良好的呼吸状态;
f) 通过呼吸曲线学习,根据自由呼吸幅度及频率选择合适螺距行回顾式 CT 扫描;待患者屏气状态稳定后行前瞻式 CT 扫描;
g) 扫描结束后根据采集到的呼吸信号完整文件完成图像重建及传输。应回顾检查患者呼吸曲线波形或不同时相序列的 CT 图像。
6.3 数据传输测试
数据传输的测试步骤如下:
a) 验证 CT 包含的头文件信息是否能被正确地导入治疗计划系统(treatment planning system, TPS);
b) 验证导入 TPS 的 CT 图像方向的正确性;
c) 验证导入 TPS 的图像几何尺寸(横状面、冠状面、矢状面),体积和层厚的精度;
d) 验证 CT 值与电子密度值转换曲线的准确性;
e) 验证在 CT-Sim 工作站上靶区及危及器官的结构勾画文件传输至 TPS 后的一致性;
f) 验证从 TPS 回传到 CT-Sim 工作站信息的一致性。
7 辐射防护要求
CT 模拟机辐射防护要求的基本内容:
a) CT 模拟机房最小使用面积不得小于 30 m2,机房内最小单边长度不小于 4.5 m。放射治疗 CT模拟机房至少配备一套完整的铅衣;
b) CT 剂量指数 CTDI
- 采用人体组织等效材料的均质圆柱模体,头部模体直径为 160 mm,体部模体直径为 320 mm,分别在中心和距表面 10 mm 处有可放置剂量探头的孔,剂量测量仪器的相对误差值应小于 5%,并已得到校准;
- 将头模或体模置于扫描野中心,模体圆柱轴线与扫描层面垂直,探头的有效探测中心位于扫描层的中心位置;
- 按照临床常用头部或体部条件进行轴向扫描;
- 记录计量仪读数,通过计算得到 CTDI100 和 CTDIw。
验收标准:①头部模体:与厂家说明书指标相差±10%以内;②体部模体:与厂家说明书指标相差±10%以内。稳定性检测:与基线值相差±15%以内。
c) CT 模拟机房应保持良好的通风;
d) CT 模拟机房门外明显处应设置电离辐射警告标志和风险告知,并安装醒目的工作状态指示灯;
e) CT 模拟机房屏蔽参照相关屏蔽规范要求:CT 模拟机房的墙壁应有足够的防护厚度,机房外人员可能受到照射的年有效剂量小于 0.25 mSv(相应的周有效剂量小于 5 μSv),距机房外表面 0.3 m 处空气比释动能率应<2.5 μGy/h;
f) CT 模拟机组件防护:X 射线源组件应当有足够铅当量的防护层,使距焦点 1 m 远处球面上漏射线的空气比释动能率<1.0 mGy/h。随机文件中应有设备生产单位提交符合法定资质的有效证
明材料。随机文件中应提供等比释动能图,描述设备周围的杂散辐射的分布;
g) CT 模拟机工作人员应定期检查控制台上所显示出患者的剂量指示值(CTDIW,CTDIvol和 DLP),若发现异常,应找出原因并加以纠正;
h) 实施 CT 模拟机定位时,其他人员不得滞留在机房内。当患者需要陪伴或携扶时,应对其采取必要的防护措施;
i) 防护门 - 门灯指示:观察 CT 模拟机在非出束、预备及出束状态下防护门指示灯的显示是否正常;
- 门机联锁:防护门打开时,确认控制台报门机联锁且 CT 模拟机不能出束;CT 模拟机在出束状态时打开防护门,确认是否出束中断且控制台报门机联锁;
- 防夹功能:防护门在关闭过程中遮挡红外感应装置,确认防护门是否停止关闭或处于打开状态。
8 .参考文献
[1] Mutic S, Palta JR, Butker EK,et al. Quality assurance for computed-tomography simulators and the computed-tomography-simulation process: report of the AAPM Radiation Therapy Committee Task Group No. 66[J]. Med Phys, 2003, 30(10): 2762-2792. DOI: 10.1118/1.1609271
9.来源