本文仅供学习使用
本文参考:
《机构运动微分几何学分析与综合》-王德伦、汪伟
《微分几何》吴大任
Ch01-3 平面运动微分几何学
- 1.2.2 瞬心线-2
- 1.2.3 点轨迹的Euler-Savary公式
1.2.2 瞬心线-2
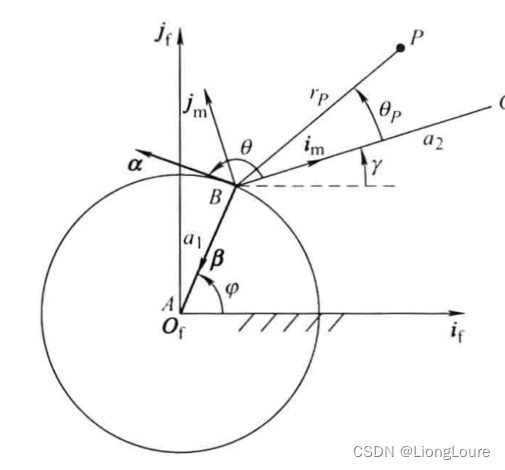
(3)平面连杆机构(二自由度开链串联机构)的瞬心线
见例1-4:铰链点B在固定坐标下中的轨迹为圆,连杆平面
(
i
⃗
m
,
j
⃗
m
)
({{\vec{i}}_{m}},{{\vec{j}}_{m}})
(im,jm)绕B点旋转,此时轨迹曲线(圆)为曲线
Γ
O
m
{{\Gamma }_{Om}}
ΓOm,其弧长
s
=
a
1
φ
s={{a}_{1}}\varphi
s=a1φ,
d
s
=
a
1
d
φ
ds={{a}_{1}}d\varphi
ds=a1dφ,其曲率为:
k
O
m
=
k
a
=
1
a
1
{{k}_{Om}}={{k}_{a}}=\frac{1}{{{a}_{1}}}
kOm=ka=a11,为常数(AB连杆长的倒数),所以曲率
k
O
m
{{k}_{Om}}
kOm的各阶倒数均为零。
- 圆曲线上Frenet标架的标矢
α
⃗
{\vec{\alpha }}
α在连杆运动坐标系
{
B
:
i
⃗
m
,
j
⃗
m
}
\{B:{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{B:im,jm}中的方向角为
θ
=
π
2
+
φ
−
γ
\theta =\frac{\pi }{2}+\varphi -\gamma
θ=2π+φ−γ,从而有
k
a
−
θ
˙
=
γ
˙
{{k}_{a}}-\dot{\theta }=\dot{\gamma }
ka−θ˙=γ˙,结合前述内容,可得连杆上瞬心的位置为:
{ θ p 0 = n π + ( φ − γ ) , n = 0 , 1 r p 0 = ∓ 1 γ ˙ \left\{ \begin{matrix} {{\theta }_{p0}}=n\pi +(\varphi -\gamma ),n=0,1 \\ {{r}_{p0}}=\mp \frac{1}{{\dot{\gamma }}} \\ \end{matrix} \right. {θp0=nπ+(φ−γ),n=0,1rp0=∓γ˙1
其中: θ = ∠ ( i ⃗ m , α ⃗ ) \theta =\angle ({{{\vec{i}}}_{m}},\vec{\alpha }) θ=∠(im,α), γ ˙ = d γ d s = d γ d t ⋅ d t d s = d γ d t ⋅ d t l 1 d φ = ω 2 l 1 ω 1 \dot{\gamma }=\frac{d\gamma }{ds}=\frac{d\gamma }{dt}\cdot \frac{dt}{ds}=\frac{d\gamma }{dt}\cdot \frac{dt}{{{l}_{1}}d\varphi }=\frac{{{\omega }_{2}}}{{{l}_{1}}{{\omega }_{1}}} γ˙=dsdγ=dtdγ⋅dsdt=dtdγ⋅l1dφdt=l1ω1ω2, ω 1 , ω 2 {{\omega }_{1}},{{\omega }_{2}} ω1,ω2为连杆AB和连杆BC的角速度。 - 则将上述确定的连杆点
P
0
(
θ
p
0
,
r
p
0
)
{{P}_{0}}({{\theta }_{p0}},{{r}_{p0}})
P0(θp0,rp0)在连杆平面(动坐标系)与机架平面(定坐标系)上分别绘制出动瞬心线
π
m
{{\pi }_{m}}
πm与定瞬心线
π
f
{{\pi }_{f}}
πf,则动瞬心线
π
m
{{\pi }_{m}}
πm在动坐标系
{
B
:
i
⃗
m
,
j
⃗
m
}
\{B:{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{B:im,jm},以及定瞬心线
π
f
{{\pi }_{f}}
πf在定坐标系
{
A
:
i
⃗
f
,
j
⃗
f
}
\{A:{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{A:if,jf}中的矢量方程分别为:
{ π m : R ⃗ m = 1 γ ˙ β ⃗ = − cos ( φ − γ ) γ ˙ i ⃗ m − sin ( φ − γ ) γ ˙ j ⃗ m π f : R ⃗ f = ( 1 γ ˙ − a 1 ) β ⃗ = ( a 1 − 1 γ ˙ ) ( cos φ i ⃗ f + sin φ j ⃗ f ) \left\{ \begin{matrix} {{\pi }_{m}}:{{{\vec{R}}}_{m}}=\frac{1}{{\dot{\gamma }}}\vec{\beta }=-\frac{\cos (\varphi -\gamma )}{{\dot{\gamma }}}{{{\vec{i}}}_{m}}-\frac{\sin (\varphi -\gamma )}{{\dot{\gamma }}}{{{\vec{j}}}_{m}} \\ {{\pi }_{f}}:{{{\vec{R}}}_{f}}=(\frac{1}{{\dot{\gamma }}}-{{a}_{1}})\vec{\beta }=({{a}_{1}}-\frac{1}{{\dot{\gamma }}})(\cos \varphi {{{\vec{i}}}_{f}}+\sin \varphi {{{\vec{j}}}_{f}}) \\ \end{matrix} \right. {πm:Rm=γ˙1β=−γ˙cos(φ−γ)im−γ˙sin(φ−γ)jmπf:Rf=(γ˙1−a1)β=(a1−γ˙1)(cosφif+sinφjf)
其中:连杆坐标系与机架坐标系之间的转换关系为:
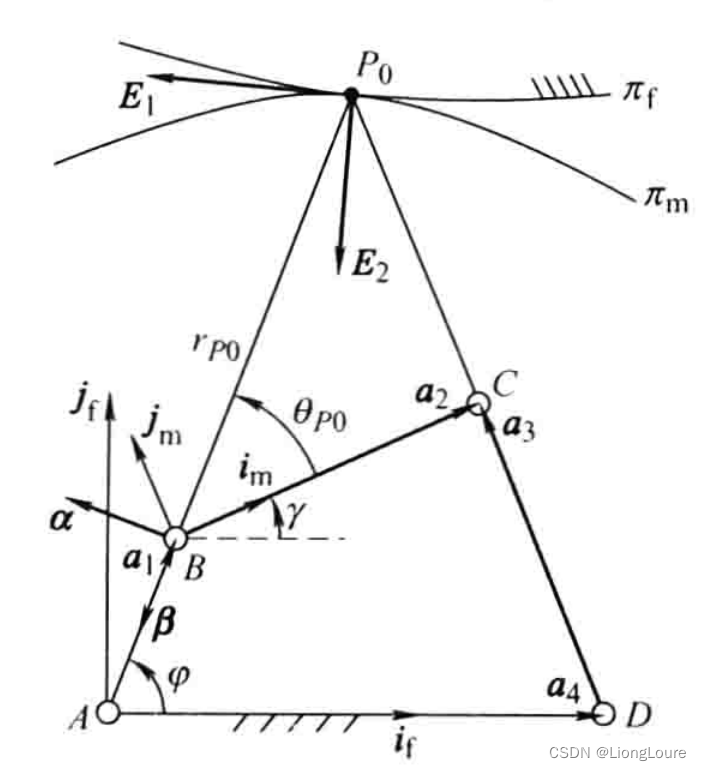
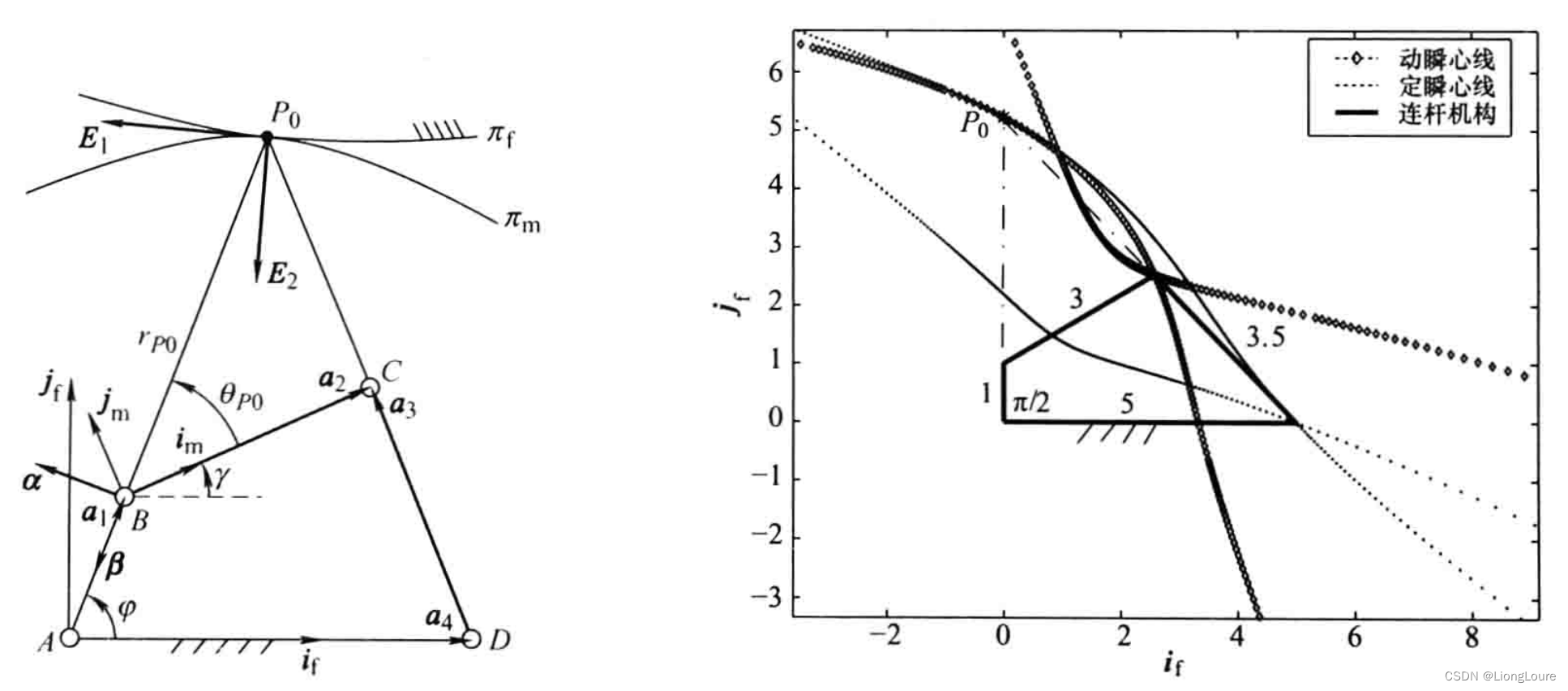
例1-5: 平面曲柄摇杆机构的动瞬心线 π m {{\pi }_{m}} πm与定瞬心线 π f {{\pi }_{f}} πf
四杆机构如下图所示,机架AD上建立机架坐标系 { A ; i ⃗ f , j ⃗ f } \{A;{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\} {A;if,jf},连杆BC上建立构件坐标系{ B ; i ⃗ m , j ⃗ m } \{B;{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\} {B;im,jm},为描述连杆平面的运动,需要首先确定出铰链点B的位移,与构件AB的转角,或者说需要对该四杆机构进行位移求解——建立闭环矢量方程:(本质上是通过约定坐标系,对机构进行运动学分析,其意义是为了在指定坐标系下——机架坐标系——描述连杆机构各可动构件/运动副/构件点的平面运动)
(此处各角度约定与向量约定依据原文,实际运动学分析约定可参考文章:待补充)
建立闭环矢量方程: a ⃗ 1 + a ⃗ 2 = a ⃗ 3 + a ⃗ 4 {{{\vec{a}}}_{1}}+{{{\vec{a}}}_{2}}={{{\vec{a}}}_{3}}+{{{\vec{a}}}_{4}} a1+a2=a3+a4
将矢量方程分别投影到坐标轴 i ⃗ f {{{\vec{i}}}_{f}} if与 j ⃗ f {{{\vec{j}}}_{f}} jf上,消去矢量 a ⃗ 3 {{{\vec{a}}}_{3}} a3的方位角可得:
a 1 2 + a 2 2 + a 4 2 − a 3 2 + 2 a 1 a 2 cos ( φ − γ ) − 2 a 1 a 4 cos φ − 2 a 2 a 4 cos γ = 0 {{a}_{1}}^{2}+{{a}_{2}}^{2}+{{a}_{4}}^{2}-{{a}_{3}}^{2}+2{{a}_{1}}{{a}_{2}}\cos (\varphi -\gamma )-2{{a}_{1}}{{a}_{4}}\cos \varphi -2{{a}_{2}}{{a}_{4}}\cos \gamma =0 a12+a22+a42−a32+2a1a2cos(φ−γ)−2a1a4cosφ−2a2a4cosγ=0
- 上式求得 γ ↔ φ \gamma \leftrightarrow \varphi γ↔φ的关系式,而在求解过程中,角度的关系式及变化范围不尽相同,往往通过Grashof准则来对平面铰链四杆机构进行分类:对于Grashof运动链,取与最短杆相邻的杆作机架的曲柄摇杆机构作为基本机构;对于非Grashof运动链,取以最长杆作机架的双摇杆机构作为基本机构。对所有四杆机构,均可由基本机构转化得到,但需用相应的变换数学模型及装配模式。
将上式对铰链点B的轨迹曲线弧长 s s s求导,简化后可得:
γ ˙ = d γ d s = a 2 sin ( φ − γ ) − a 4 sin φ a 2 a 4 sin γ + a 1 a 2 sin ( φ − γ ) \dot{\gamma }=\frac{d\gamma }{ds}=\frac{{{a}_{2}}\sin (\varphi -\gamma )-{{a}_{4}}\sin \varphi }{{{a}_{2}}{{a}_{4}}\sin \gamma +{{a}_{1}}{{a}_{2}}\sin (\varphi -\gamma )} γ˙=dsdγ=a2a4sinγ+a1a2sin(φ−γ)a2sin(φ−γ)−a4sinφ
- 由于位移方程是非线性的,随不同运动位置求解容易出现奇异,建议按四杆机构的基本形式建立位移方程求解,然后变换机架得到所使用的四杆机构类型位移解,肖大准教授早有论述,在此不赘述。
(1)曲柄摇杆机构
给定一个平面曲柄摇杆机构,其杆长分别为: a 1 = 1 , a 2 = 3 , a 3 = 3.5 , a 4 = 5 {{a}_{1}}=1,{{a}_{2}}=3,{{a}_{3}}=3.5,{{a}_{4}}=5 a1=1,a2=3,a3=3.5,a4=5,其瞬心线如下所示:
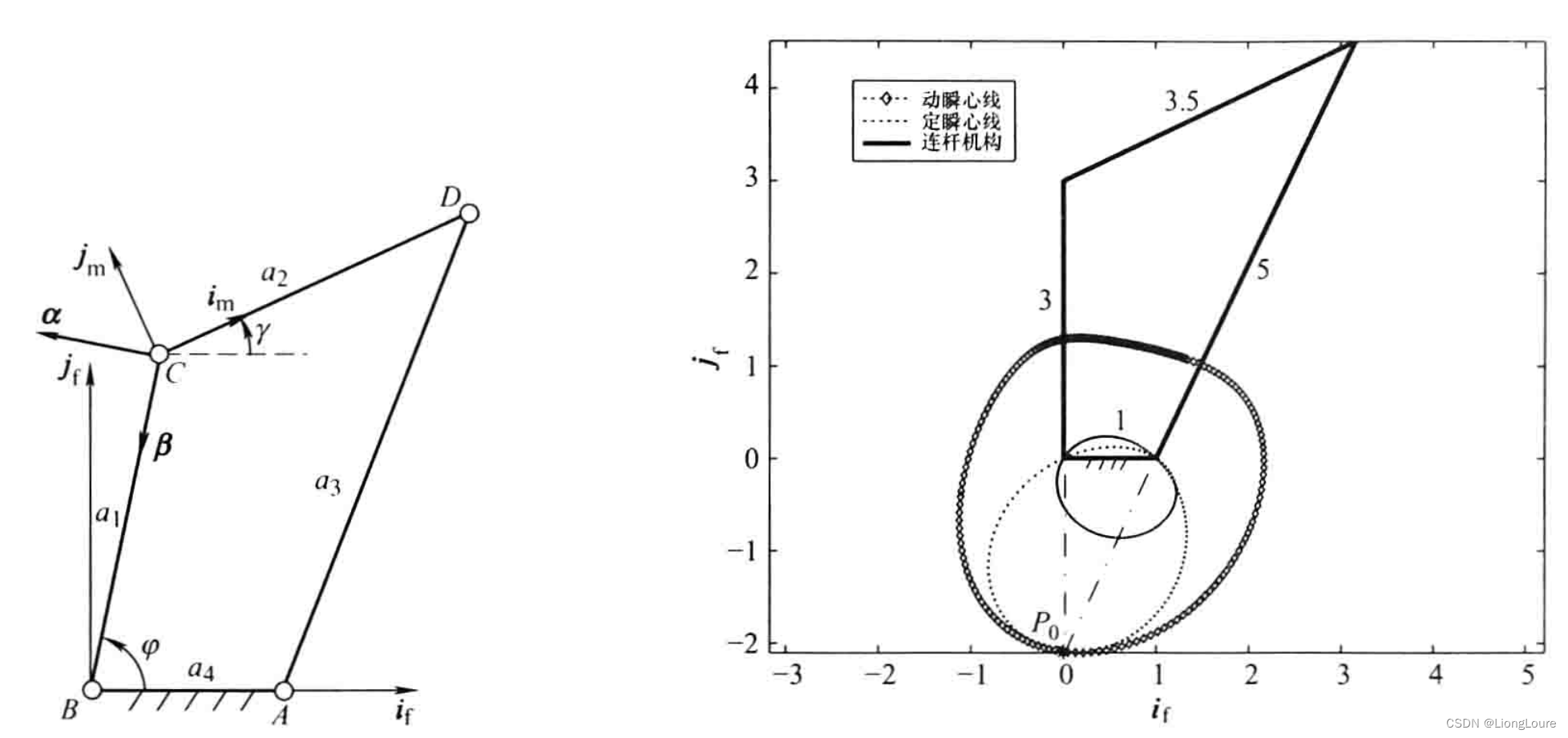
(2)双曲柄机构
将上图的四杆机构进行变换:AB杆为机架,BC杆为原动件,则四杆机构变换称双曲柄机构,此时四杆机构变换称双曲柄机构。
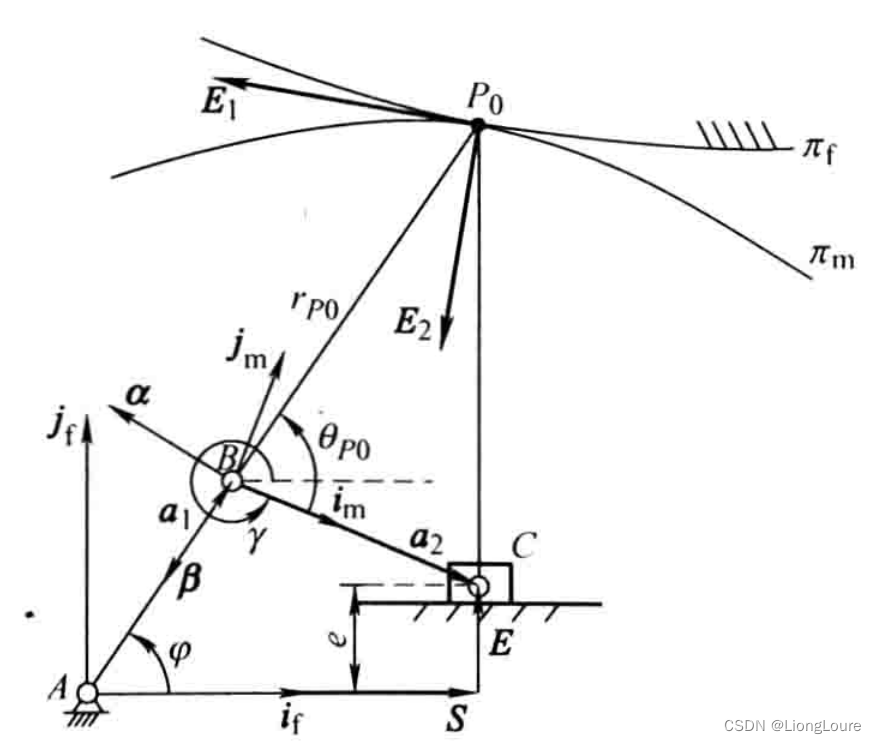
例1-6: 平面曲柄滑块机构的动瞬心线 π m {{\pi }_{m}} πm与定瞬心线 π f {{\pi }_{f}} πf
其闭环矢量方程为:
a ⃗ 1 + a ⃗ 2 = S ⃗ + E ⃗ {{\vec{a}}_{1}}+{{\vec{a}}_{2}}=\vec{S}+\vec{E} a1+a2=S+E
将矢量方程向固定坐标系 { A : i ⃗ f , j ⃗ f } \{A:{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\} {A:if,jf}的坐标轴 j ⃗ f {{{\vec{j}}}_{f}} jf上投影,可得:
a 1 sin φ + a 2 sin γ − e = 0 {{a}_{1}}\sin \varphi +{{a}_{2}}\sin \gamma -e=0 a1sinφ+a2sinγ−e=0
- 上式确定了平面曲柄滑块机构连杆BC的倾角与输入杆AB的转角之间的关系
对铰链点B的轨迹曲线弧长 s s s求导,化简后可得:
γ ˙ = d γ d s = − cos φ a 2 cos γ \dot{\gamma }=\frac{d\gamma }{ds}=-\frac{\cos \varphi }{{{a}_{2}}\cos \gamma } γ˙=dsdγ=−a2cosγcosφ
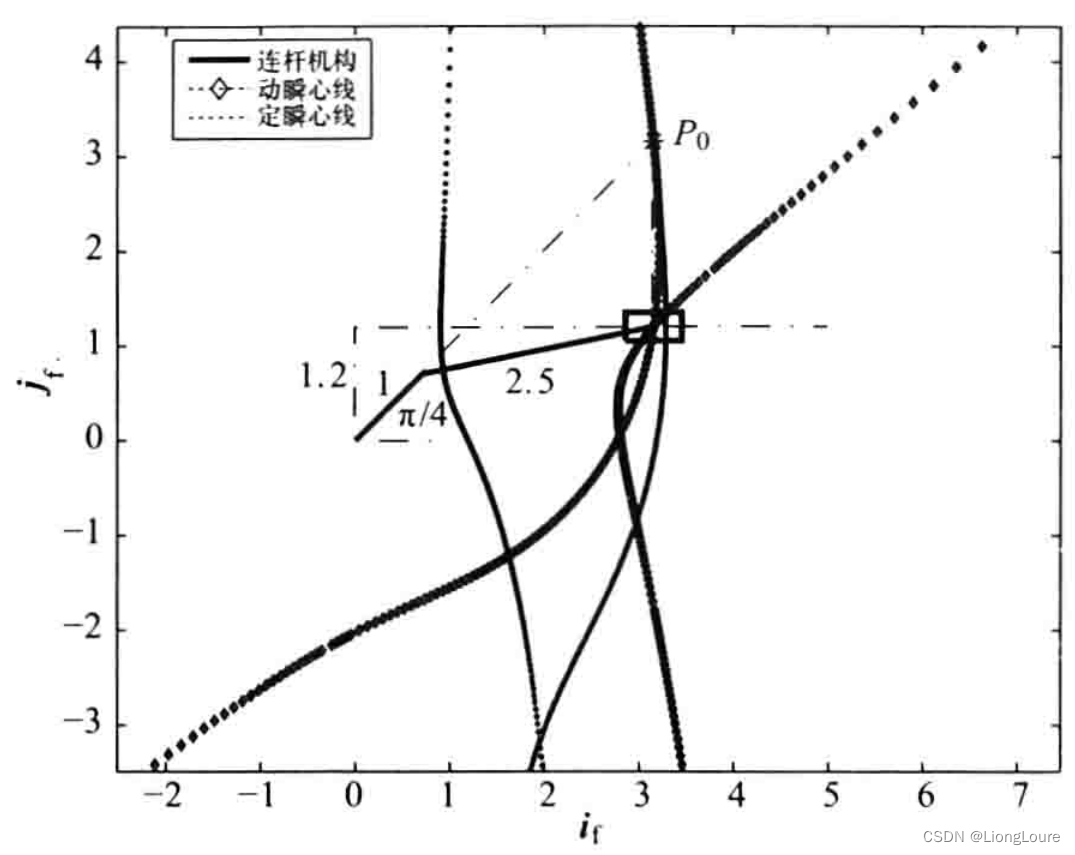
令: a 1 = 1 , a 2 = 2.5 , e = 1.2 {{a}_{1}}=1,{{a}_{2}}=2.5,e=1.2 a1=1,a2=2.5,e=1.2,其连杆相对机架的转角函数为: γ = γ ( φ ) \gamma =\gamma (\varphi ) γ=γ(φ)——
1.2.3 点轨迹的Euler-Savary公式
如上节所述,运动刚体
∑
∗
\sum *
∑∗相对于固定刚体
∑
\sum
∑的平面运动,可以通过运动刚体
∑
∗
\sum *
∑∗相对固定刚体
∑
\sum
∑的线位移及转角(即:线/角位移)的三种方式来表示 (齐次旋转矩阵、
{
R
o
m
:
i
⃗
m
,
j
⃗
m
}
\{{{R}_{om}}:{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Rom:im,jm}、
{
R
o
m
:
α
⃗
,
β
⃗
}
\{{{R}_{om}}:\vec{\alpha },\vec{\beta }\}
{Rom:α,β}),每种方式都由三个独立参数(自由度)确定刚体”的运动。然而,这三种方式中却没有直观表达刚体的运动本质,或体现刚体的运动学与轨迹几何学之间的内在联系。 由相伴运动方法推导出刚体运动的动瞬心线
π
m
{{\pi }_{m}}
πm与定瞬心线
π
f
{{\pi }_{f}}
πf,这两条瞬心线在瞬心点处活动标架重合、微弧长相等,并随刚体运动而相切地纯滚动。 显然,瞬心线本身隐含着刚体相对运动的内在联系信息,以其为出发点研究刚体
∑
∗
\sum *
∑∗上图形,如点或者直线在固定刚体上轨迹的几何性质,无疑是既顺畅自然又简洁直观的方式,已有的研究结果表明相伴运动方法将大大简化研究问题,并使得其曲率公式形式优美。
本节仍沿用上节的相伴运动方法,分别以运动刚体平面上的动瞬心线 π m {{\pi }_{m}} πm和固定平面上的定瞬心线 π f {{\pi }_{f}} πf作为原曲线,将运动刚体上的点分别看作与动、定瞬心线作相伴运动,可得到瞬时在瞬心线活动标架中描述的点轨迹的曲率公式以及高阶曲率特征。
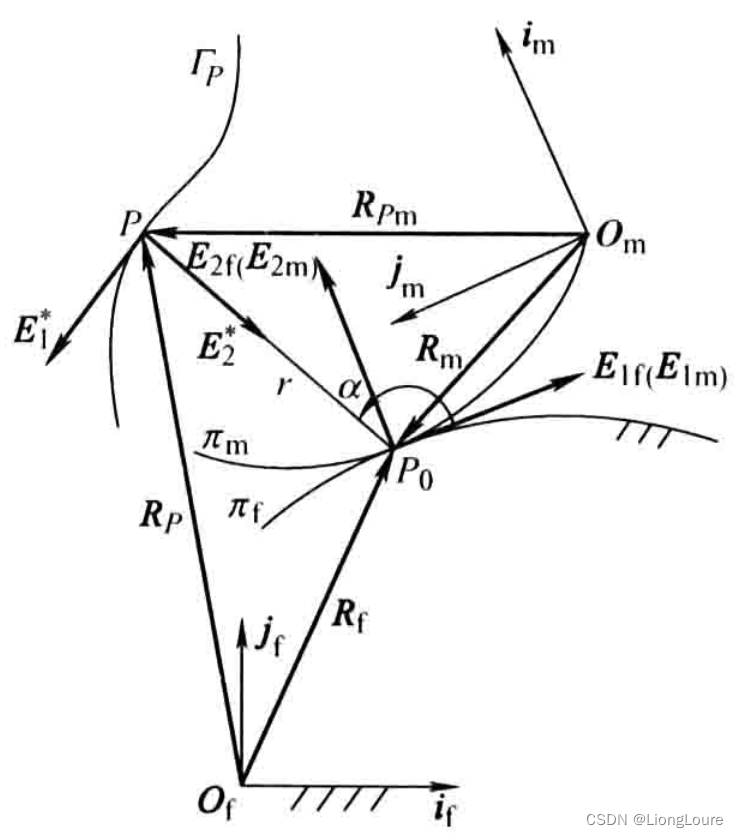
任意瞬时平面运动刚体
∑
∗
\sum *
∑∗上的一点
P
P
P总是与瞬心点相互对应,表明:点
P
P
P的轨迹曲线和瞬心线可以分别视为彼此的相伴曲线——在固定坐标系
{
O
f
:
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}}:{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of:if,jf}中,将点
P
P
P的轨迹曲线
Γ
P
{{\Gamma }_{P}}
ΓP看成定瞬心线
π
f
{{\pi }_{f}}
πf的相伴曲线——以定瞬心线
π
f
{{\pi }_{f}}
πf为原曲线来描述点
P
P
P在固定平面上的轨迹
Γ
P
{{\Gamma }_{P}}
ΓP:
则有:
Γ
P
:
R
⃗
p
=
R
⃗
f
+
v
1
E
⃗
1
f
+
v
2
E
⃗
2
f
{{\Gamma }_{P}}:{{{\vec{R}}}_{p}}={{{\vec{R}}}_{f}}+{{v}_{1}}{{{\vec{E}}}_{1f}}+{{v}_{2}}{{{\vec{E}}}_{2f}}
ΓP:Rp=Rf+v1E1f+v2E2f
- 其中: ( v 1 , v 2 ) ({{v}_{1}},{{v}_{2}}) (v1,v2)为运动刚体 ∑ ∗ \sum * ∑∗上点 P P P在定瞬心线活动标架 { R f : E ⃗ 1 f , E ⃗ 2 f } \{{{R}_{f}}:{{{\vec{E}}}_{1f}},{{{\vec{E}}}_{2f}}\} {Rf:E1f,E2f}中的相对坐标,若以极坐标 ( r , α ) (r,\alpha ) (r,α)表示,则有: { v 1 = r cos α v 2 = r sin α \left\{ \begin{matrix} {{v}_{1}}=r\cos \alpha \\ {{v}_{2}}=r\sin \alpha \\ \end{matrix} \right. {v1=rcosαv2=rsinα
将上式对动、定瞬心线的弧长 σ \sigma σ求导(定瞬心线弧长),可得: d R ⃗ P d σ = ( 1 + d v 1 d σ f − k f v 2 ) E ⃗ 1 f + ( d v 2 d σ f + k f v 1 ) E ⃗ 2 f \frac{d{{{\vec{R}}}_{P}}}{d\sigma }=(1+\frac{d{{v}_{1}}}{d{{\sigma }_{f}}}-{{k}_{f}}{{v}_{2}}){{{\vec{E}}}_{1f}}+(\frac{d{{v}_{2}}}{d{{\sigma }_{f}}}+{{k}_{f}}{{v}_{1}}){{{\vec{E}}}_{2f}} dσdRP=(1+dσfdv1−kfv2)E1f+(dσfdv2+kfv1)E2f
考察点
P
P
P在动瞬心线
π
m
{{\pi }_{m}}
πm上的Frenet标架
{
R
m
:
E
⃗
1
m
,
E
⃗
2
m
}
\{{{R}_{m}}:{{{\vec{E}}}_{1m}},{{{\vec{E}}}_{2m}}\}
{Rm:E1m,E2m}上的运动,则有:
R
⃗
P
m
=
R
⃗
m
+
u
1
E
⃗
1
m
+
u
2
E
⃗
2
m
{{{\vec{R}}}_{Pm}}={{{\vec{R}}}_{m}}+{{u}_{1}}{{{\vec{E}}}_{1m}}+{{u}_{2}}{{{\vec{E}}}_{2m}}
RPm=Rm+u1E1m+u2E2m
- 其中: ( u 1 , u 2 ) ({{u}_{1}},{{u}_{2}}) (u1,u2)为点 P P P在动瞬心线 π m {{\pi }_{m}} πm上是Frenet标架 { R m : E ⃗ 1 m , E ⃗ 2 m } \{{{R}_{m}}:{{{\vec{E}}}_{1m}},{{{\vec{E}}}_{2m}}\} {Rm:E1m,E2m}中的坐标参数
即从运动刚体 ∑ ∗ \sum * ∑∗上固接的运动坐标系 { O m : i ⃗ m , j ⃗ m } \{{{O}_{m}}:{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\} {Om:im,jm}原点引矢量 R ⃗ m {{{\vec{R}}}_{m}} Rm到瞬心点(动瞬心线 π m {{\pi }_{m}} πm上),再由瞬心点(动瞬心线上Frenet标架)考察点 P ( u 1 , u 2 ) P({{u}_{1}},{{u}_{2}}) P(u1,u2)的运动,即把点 P P P的运动看成与动瞬心线 π m {{\pi }_{m}} πm的相伴运动,
将上式对动瞬心线弧长 σ m {{\sigma }_{m}} σm进行求导可得: d R ⃗ P m d σ m = ( 1 + d u 1 d σ m − k m u 2 ) E ⃗ 1 m + ( d u 2 d σ m + k m u 1 ) E ⃗ 2 m \frac{d{{{\vec{R}}}_{Pm}}}{d{{\sigma }_{m}}}=(1+\frac{d{{u}_{1}}}{d{{\sigma }_{m}}}-{{k}_{m}}{{u}_{2}}){{{\vec{E}}}_{1m}}+(\frac{d{{u}_{2}}}{d{{\sigma }_{m}}}+{{k}_{m}}{{u}_{1}}){{{\vec{E}}}_{2m}} dσmdRPm=(1+dσmdu1−kmu2)E1m+(dσmdu2+kmu1)E2m
由于点
P
P
P是运动刚体
∑
∗
\sum *
∑∗上的固定点,即在运动刚体坐标系
{
O
m
:
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}}:{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om:im,jm}中,点
P
P
P的绝对运动变换率为零,即
d
R
⃗
P
m
d
σ
m
=
0
\frac{d{{{\vec{R}}}_{Pm}}}{d{{\sigma }_{m}}}=0
dσmdRPm=0,从而点
P
P
P的运动满足Cesaro不动点条件:
{
1
+
d
u
1
d
σ
m
−
k
m
u
2
=
0
d
u
2
d
σ
m
+
k
m
u
1
=
0
⇒
{
d
u
1
d
σ
m
=
k
m
u
2
−
1
d
u
2
d
σ
m
=
−
k
m
u
1
\left\{ \begin{matrix} 1+\frac{d{{u}_{1}}}{d{{\sigma }_{m}}}-{{k}_{m}}{{u}_{2}}=0 \\ \frac{d{{u}_{2}}}{d{{\sigma }_{m}}}+{{k}_{m}}{{u}_{1}}=0 \\ \end{matrix} \right.\Rightarrow \left\{ \begin{matrix} \frac{d{{u}_{1}}}{d{{\sigma }_{m}}}={{k}_{m}}{{u}_{2}}-1 \\ \frac{d{{u}_{2}}}{d{{\sigma }_{m}}}=-{{k}_{m}}{{u}_{1}} \\ \end{matrix} \right.
{1+dσmdu1−kmu2=0dσmdu2+kmu1=0⇒{dσmdu1=kmu2−1dσmdu2=−kmu1
上式表明了在活动标架沿动瞬心线
π
m
{{\pi }_{m}}
πm运动时,观察到点
P
P
P的变化(上式是点
P
P
P为瞬心的特款):犹如小船在小河中前进,艄公所观察到小河岸边景物的变化一样,该变化的性质由小河的弯曲程度体现,那么
(
d
u
1
d
σ
m
,
d
u
2
d
σ
m
)
(\frac{d{{u}_{1}}}{d{{\sigma }_{m}}},\frac{d{{u}_{2}}}{d{{\sigma }_{m}}})
(dσmdu1,dσmdu2)是运动刚体
∑
∗
\sum *
∑∗上点
P
P
P在动瞬心线
π
m
{{\pi }_{m}}
πm的Frenet标架
{
R
⃗
m
:
E
⃗
1
m
,
E
⃗
2
m
}
\{{{{\vec{R}}}_{m}}:{{{\vec{E}}}_{1m}},{{{\vec{E}}}_{2m}}\}
{Rm:E1m,E2m}的相对运动分量也就是动瞬心线
π
m
{{\pi }_{m}}
πm本身几何性质的体现。
且知,动瞬心线与定瞬心线的Frenet 标架重合,在瞬心点处相切地纯滚动,即同一点
P
P
P在瞬时重合的活动标架
{
R
⃗
f
:
E
⃗
1
f
,
E
⃗
2
f
}
\{{{{\vec{R}}}_{f}}:{{{\vec{E}}}_{1f}},{{{\vec{E}}}_{2f}}\}
{Rf:E1f,E2f}与
{
R
⃗
m
:
E
⃗
1
m
,
E
⃗
2
m
}
\{{{{\vec{R}}}_{m}}:{{{\vec{E}}}_{1m}},{{{\vec{E}}}_{2m}}\}
{Rm:E1m,E2m}中具有相同的投影坐标及其变化率,即∶
u
1
=
v
1
,
u
2
=
v
2
,
d
u
1
d
σ
m
=
d
v
1
d
σ
f
,
d
u
2
d
σ
m
=
d
v
2
d
σ
f
{{u}_{1}}={{v}_{1}},{{u}_{2}}={{v}_{2}},\frac{d{{u}_{1}}}{d{{\sigma }_{m}}}=\frac{d{{v}_{1}}}{d{{\sigma }_{f}}},\frac{d{{u}_{2}}}{d{{\sigma }_{m}}}=\frac{d{{v}_{2}}}{d{{\sigma }_{f}}}
u1=v1,u2=v2,dσmdu1=dσfdv1,dσmdu2=dσfdv2
进而可得:
d
R
⃗
P
d
σ
=
(
k
f
−
k
m
)
(
−
v
2
E
⃗
1
f
+
v
1
E
⃗
2
f
)
=
r
k
∗
(
−
sin
α
E
⃗
1
f
+
cos
α
E
⃗
2
f
)
\frac{d{{{\vec{R}}}_{P}}}{d\sigma }=({{k}_{f}}-{{k}_{m}})(-{{v}_{2}}{{{\vec{E}}}_{1f}}+{{v}_{1}}{{{\vec{E}}}_{2f}})=rk*(-\sin \alpha {{{\vec{E}}}_{1f}}+\cos \alpha {{{\vec{E}}}_{2f}})
dσdRP=(kf−km)(−v2E1f+v1E2f)=rk∗(−sinαE1f+cosαE2f)
进而可得:
d
σ
P
=
∣
d
R
⃗
P
d
σ
∣
d
σ
=
r
k
∗
d
σ
d{{\sigma }_{P}}=\left| \frac{d{{{\vec{R}}}_{P}}}{d\sigma } \right|d\sigma =rk*d\sigma
dσP=∣∣∣dσdRP∣∣∣dσ=rk∗dσ
将
{
v
1
=
r
cos
α
v
2
=
r
sin
α
\left\{ \begin{matrix} {{v}_{1}}=r\cos \alpha \\ {{v}_{2}}=r\sin \alpha \\ \end{matrix} \right.
{v1=rcosαv2=rsinα对
σ
\sigma
σ求导,并利用不动点条件化简,得:
d
r
d
σ
=
−
cos
α
,
d
α
d
σ
=
−
k
m
+
sin
α
r
\frac{dr}{d\sigma }=-\cos \alpha ,\frac{d\alpha }{d\sigma }=-{{k}_{m}}+\frac{\sin \alpha }{r}
dσdr=−cosα,dσdα=−km+rsinα
详细推导:
{ v 1 = r cos α v 2 = r sin α ⇒ { d v 1 d σ = d r d σ cos α − r sin α d α d σ = k m u 2 − 1 1 d v 2 d σ = d r d σ sin α + r cos α d α d σ = − k m u 1 2 \left\{ \begin{matrix} {{v}_{1}}=r\cos \alpha \\ {{v}_{2}}=r\sin \alpha \\ \end{matrix} \right.\Rightarrow \left\{ \begin{matrix} \frac{d{{v}_{1}}}{d\sigma }=\frac{dr}{d\sigma }\cos \alpha -r\sin \alpha \frac{d\alpha }{d\sigma }={{k}_{m}}{{u}_{2}}-1\text{ }1 \\ \frac{d{{v}_{2}}}{d\sigma }=\frac{dr}{d\sigma }\sin \alpha +r\cos \alpha \frac{d\alpha }{d\sigma }=-{{k}_{m}}{{u}_{1}}\text{ }2 \\ \end{matrix} \right. {v1=rcosαv2=rsinα⇒{dσdv1=dσdrcosα−rsinαdσdα=kmu2−1 1dσdv2=dσdrsinα+rcosαdσdα=−kmu1 2
{ 1 ⋅ sin α + 2 ⋅ cos α v 1 = r cos α , v 2 = r sin α ⇒ d r d σ = ( k m u 2 − 1 ) cos α − k m u 1 sin α = − cos α \left\{ \begin{matrix} 1\centerdot \sin \alpha +2\centerdot \cos \alpha \\ {{v}_{1}}=r\cos \alpha ,{{v}_{2}}=r\sin \alpha \\ \end{matrix} \right.\Rightarrow \frac{dr}{d\sigma }=({{k}_{m}}{{u}_{2}}-1)\cos \alpha -{{k}_{m}}{{u}_{1}}\sin \alpha =-\cos \alpha {1⋅sinα+2⋅cosαv1=rcosα,v2=rsinα⇒dσdr=(kmu2−1)cosα−kmu1sinα=−cosα
将 d r d σ = − cos α \frac{dr}{d\sigma }=-\cos \alpha dσdr=−cosα带入 2 2 2中,可得:
− cos α sin α + r cos α d α d σ = − k m r cos α ⇒ d α d σ = − k m + sin α r -\cos \alpha \sin \alpha +r\cos \alpha \frac{d\alpha }{d\sigma }=-{{k}_{m}}r\cos \alpha \Rightarrow \frac{d\alpha }{d\sigma }=-{{k}_{m}}+\frac{\sin \alpha }{r} −cosαsinα+rcosαdσdα=−kmrcosα⇒dσdα=−km+rsinα
进而建立P点轨迹曲线
Γ
P
{{\Gamma }_{P}}
ΓP的Frenet标架
{
R
⃗
P
:
E
⃗
1
∗
,
E
⃗
2
∗
}
\{{{{\vec{R}}}_{P}}:{{{\vec{E}}}_{1}}*,{{{\vec{E}}}_{2}}*\}
{RP:E1∗,E2∗}为:
{
E
⃗
1
∗
=
R
⃗
P
d
σ
P
=
R
⃗
P
d
σ
f
/
∣
R
⃗
P
d
σ
f
∣
=
−
sin
α
E
⃗
1
f
+
cos
α
E
⃗
2
f
E
⃗
2
∗
=
k
⃗
×
E
⃗
1
∗
=
−
cos
α
E
⃗
1
f
−
sin
α
E
⃗
2
f
\left\{ \begin{matrix} {{{\vec{E}}}_{1}}*=\frac{{{{\vec{R}}}_{P}}}{d{{\sigma }_{P}}}=\frac{{{{\vec{R}}}_{P}}}{d{{\sigma }_{f}}}/\left| \frac{{{{\vec{R}}}_{P}}}{d{{\sigma }_{f}}} \right|=-\sin \alpha {{{\vec{E}}}_{1f}}+\cos \alpha {{{\vec{E}}}_{2f}} \\ {{{\vec{E}}}_{2}}*=\vec{k}\times {{{\vec{E}}}_{1}}*=-\cos \alpha {{{\vec{E}}}_{1f}}-\sin \alpha {{{\vec{E}}}_{2f}} \\ \end{matrix} \right.
{E1∗=dσPRP=dσfRP/∣∣∣dσfRP∣∣∣=−sinαE1f+cosαE2fE2∗=k×E1∗=−cosαE1f−sinαE2f
进而可得:
k
Γ
=
d
E
⃗
1
∗
d
σ
P
⋅
E
⃗
2
∗
=
1
r
+
sin
α
r
2
k
∗
=
r
+
sin
α
/
k
∗
r
2
{{k}_{\Gamma }}=\frac{d{{{\vec{E}}}_{1}}*}{d{{\sigma }_{P}}}\cdot {{{\vec{E}}}_{2}}*=\frac{1}{r}+\frac{\sin \alpha }{{{r}^{2}}k*}=\frac{r+\sin \alpha /k*}{{{r}^{2}}}
kΓ=dσPdE1∗⋅E2∗=r1+r2k∗sinα=r2r+sinα/k∗
详细推导:
d E ⃗ 1 ∗ d σ P = 1 r 2 k ∗ ( − cos α d α d s E ⃗ 1 f − sin α k f E ⃗ 2 f − sin α d α d s E ⃗ 2 f − cos α k f E ⃗ 1 f ) \frac{d{{{\vec{E}}}_{1}}*}{d{{\sigma }_{P}}}=\frac{1}{{{r}^{2}}k*}(-\cos \alpha \frac{d\alpha }{ds}{{{\vec{E}}}_{1f}}-\sin \alpha {{k}_{f}}{{{\vec{E}}}_{2f}}-\sin \alpha \frac{d\alpha }{ds}{{{\vec{E}}}_{2f}}-\cos \alpha {{k}_{f}}{{{\vec{E}}}_{1f}}) dσPdE1∗=r2k∗1(−cosαdsdαE1f−sinαkfE2f−sinαdsdαE2f−cosαkfE1f)
⇒ d E ⃗ 1 ∗ d σ P = − cos α r 2 k ∗ ( d α d s + k f ) E ⃗ 1 f + − sin α r 2 k ∗ ( d α d s + k f ) E ⃗ 2 f \Rightarrow \frac{d{{{\vec{E}}}_{1}}*}{d{{\sigma }_{P}}}=\frac{-\cos \alpha }{{{r}^{2}}k*}(\frac{d\alpha }{ds}+{{k}_{f}}){{{\vec{E}}}_{1f}}+\frac{-\sin \alpha }{{{r}^{2}}k*}(\frac{d\alpha }{ds}+{{k}_{f}}){{{\vec{E}}}_{2f}} ⇒dσPdE1∗=r2k∗−cosα(dsdα+kf)E1f+r2k∗−sinα(dsdα+kf)E2f
k Γ = d E ⃗ 1 ∗ d σ P ⋅ E ⃗ 2 ∗ = ( − cos α r 2 k ∗ ( d α d s + k f ) E ⃗ 1 f + − sin α r 2 k ∗ ( d α d s + k f ) E ⃗ 2 f ) ⋅ ( − cos α E ⃗ 1 f − sin α E ⃗ 2 f ) = d α d s + k f r 2 k ∗ = k ∗ + sin α r r 2 k ∗ {{k}_{\Gamma }}=\frac{d{{{\vec{E}}}_{1}}*}{d{{\sigma }_{P}}}\cdot {{{\vec{E}}}_{2}}*=(\frac{-\cos \alpha }{{{r}^{2}}k*}(\frac{d\alpha }{ds}+{{k}_{f}}){{{\vec{E}}}_{1f}}+\frac{-\sin \alpha }{{{r}^{2}}k*}(\frac{d\alpha }{ds}+{{k}_{f}}){{{\vec{E}}}_{2f}})\cdot (-\cos \alpha {{{\vec{E}}}_{1f}}-\sin \alpha {{{\vec{E}}}_{2f}})=\frac{\frac{d\alpha }{ds}+{{k}_{f}}}{{{r}^{2}}k*}=\frac{k*+\frac{\sin \alpha }{r}}{{{r}^{2}}k*} kΓ=dσPdE1∗⋅E2∗=(r2k∗−cosα(dsdα+kf)E1f+r2k∗−sinα(dsdα+kf)E2f)⋅(−cosαE1f−sinαE2f)=r2k∗dsdα+kf=r2k∗k∗+rsinα
由此得到运动刚体运动刚体
∑
∗
\sum *
∑∗上点
P
P
P瞬时在固定刚体
∑
\sum
∑上的轨迹曲线的曲率公式,也就是著名的Euler-Savary公式。若将曲率
k
k
k,用曲率半径
ρ
\rho
ρ的倒数代替,则得到另一种表达形式∶
ρ
Γ
(
r
+
sin
α
k
∗
)
=
r
2
{{\rho }_{\Gamma }}(r+\frac{\sin \alpha }{k*})={{r}^{2}}
ρΓ(r+k∗sinα)=r2
即平面Euler-Savary公式描述了平面运动刚体上点的位置(在Frenet标架
{
R
⃗
f
:
E
⃗
1
f
,
E
⃗
2
f
}
\{{{{\vec{R}}}_{f}}:{{{\vec{E}}}_{1f}},{{{\vec{E}}}_{2f}}\}
{Rf:E1f,E2f}中的极坐标
r
,
α
r,\alpha
r,α)、轨迹的曲率半径(中心)
ρ
Γ
{{\rho }_{\Gamma }}
ρΓ以及动、定瞬心线诱导曲率
k
∗
k*
k∗之间的关系。
将点P转换到运动坐标系
{
O
m
:
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}}:{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om:im,jm}中,以直角坐标
(
x
p
m
,
y
p
m
)
({{x}_{pm}},{{y}_{pm}})
(xpm,ypm)表示,则可得到点
P
P
P轨迹曲线
Γ
P
{{\Gamma }_{P}}
ΓP曲率的另一表达形式∶
{
k
Γ
=
F
G
F
=
(
x
p
m
−
a
)
2
+
(
y
p
m
−
b
)
2
−
D
2
4
G
=
[
(
x
p
m
+
sin
θ
k
O
m
−
θ
˙
)
2
+
(
y
p
m
−
cos
θ
k
O
m
−
θ
˙
)
2
]
3
2
a
=
−
(
k
˙
O
m
−
θ
¨
)
cos
θ
+
(
2
k
O
m
−
θ
˙
)
(
k
O
m
−
θ
˙
)
sin
θ
2
(
k
O
m
−
θ
˙
)
3
b
=
−
(
k
˙
O
m
−
θ
¨
)
sin
θ
+
(
2
k
O
m
−
θ
˙
)
(
k
O
m
−
θ
˙
)
cos
θ
2
(
k
O
m
−
θ
˙
)
3
\left\{ \begin{matrix} {{k}_{\Gamma }}=\frac{F}{G} \\ F={{({{x}_{pm}}-a)}^{2}}+{{({{y}_{pm}}-b)}^{2}}-\frac{{{D}^{2}}}{4} \\ G={{[{{({{x}_{pm}}+\frac{\sin \theta }{{{k}_{Om}}-\dot{\theta }})}^{2}}+{{({{y}_{pm}}-\frac{\cos \theta }{{{k}_{Om}}-\dot{\theta }})}^{2}}]}^{\frac{3}{2}}} \\ a=-\frac{({{{\dot{k}}}_{Om}}-\ddot{\theta })\cos \theta +(2{{k}_{Om}}-\dot{\theta })({{k}_{Om}}-\dot{\theta })\sin \theta }{2{{({{k}_{Om}}-\dot{\theta })}^{3}}} \\ b=-\frac{({{{\dot{k}}}_{Om}}-\ddot{\theta })\sin \theta +(2{{k}_{Om}}-\dot{\theta })({{k}_{Om}}-\dot{\theta })\cos \theta }{2{{({{k}_{Om}}-\dot{\theta })}^{3}}} \\ \end{matrix} \right.
⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧kΓ=GFF=(xpm−a)2+(ypm−b)2−4D2G=[(xpm+kOm−θ˙sinθ)2+(ypm−kOm−θ˙cosθ)2]23a=−2(kOm−θ˙)3(k˙Om−θ¨)cosθ+(2kOm−θ˙)(kOm−θ˙)sinθb=−2(kOm−θ˙)3(k˙Om−θ¨)sinθ+(2kOm−θ˙)(kOm−θ˙)cosθ
详细推导:
设: d σ m = ( θ ˙ 2 a 2 + b 2 a 4 ) 1 2 d s ⇒ d s d σ m = a 2 ( θ ˙ 2 a 2 + b 2 ) 1 2 = A d{{\sigma }_{m}}={{(\frac{{{{\dot{\theta }}}^{2}}}{{{a}^{2}}}+\frac{{{b}^{2}}}{{{a}^{4}}})}^{\frac{1}{2}}}ds\Rightarrow \frac{ds}{d{{\sigma }_{m}}}=\frac{{{a}^{2}}}{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}=A dσm=(a2θ˙2+a4b2)21ds⇒dσmds=(θ˙2a2+b2)21a2=A
则将动瞬心线 π m {{\pi }_{m}} πm的Frenet标架基矢量改写为: { R ⃗ m = 1 a ( − sin θ i ⃗ m + cos θ j ⃗ m ) E ⃗ 1 m = [ − θ ˙ a cos θ + b sin θ a 2 i ⃗ m − θ ˙ a sin θ + b cos θ a 2 j ⃗ m ] A E ⃗ 2 m = [ θ ˙ a sin θ + b cos θ a 2 i ⃗ m + − θ ˙ a cos θ + b sin θ a 2 j ⃗ m ] A \left\{ \begin{matrix} {{{\vec{R}}}_{m}}=\frac{1}{a}(-\sin \theta {{{\vec{i}}}_{m}}+\cos \theta {{{\vec{j}}}_{m}}) \\ {{{\vec{E}}}_{1m}}=[\frac{-\dot{\theta }a\cos \theta +b\sin \theta }{{{a}^{2}}}{{{\vec{i}}}_{m}}-\frac{\dot{\theta }a\sin \theta +b\cos \theta }{{{a}^{2}}}{{{\vec{j}}}_{m}}]A \\ {{{\vec{E}}}_{2m}}=[\frac{\dot{\theta }a\sin \theta +b\cos \theta }{{{a}^{2}}}{{{\vec{i}}}_{m}}+\frac{-\dot{\theta }a\cos \theta +b\sin \theta }{{{a}^{2}}}{{{\vec{j}}}_{m}}]A \\ \end{matrix} \right. ⎩⎪⎨⎪⎧Rm=a1(−sinθim+cosθjm)E1m=[a2−θ˙acosθ+bsinθim−a2θ˙asinθ+bcosθjm]AE2m=[a2θ˙asinθ+bcosθim+a2−θ˙acosθ+bsinθjm]A
且已知: { u 1 = r cos α u 2 = r sin α , k Γ = r + sin α / k ∗ r 2 , k ∗ = a 3 ( θ ˙ 2 a 2 + b 2 ) 1 2 \left\{ \begin{matrix} {{u}_{1}}=r\cos \alpha \\ {{u}_{2}}=r\sin \alpha \\ \end{matrix} \right.,{{k}_{\Gamma }}=\frac{r+\sin \alpha /k*}{{{r}^{2}}},k*=\frac{{{a}^{3}}}{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}} {u1=rcosαu2=rsinα,kΓ=r2r+sinα/k∗,k∗=(θ˙2a2+b2)21a3
R ⃗ P m = R ⃗ m + u 1 E ⃗ 1 m + u 2 E ⃗ 2 m {{{\vec{R}}}_{Pm}}={{{\vec{R}}}_{m}}+{{u}_{1}}{{{\vec{E}}}_{1m}}+{{u}_{2}}{{{\vec{E}}}_{2m}} RPm=Rm+u1E1m+u2E2m,其坐标参数可表示为 ( x P m , y P m ) ({{x}_{Pm}},{{y}_{Pm}}) (xPm,yPm),可得:
{ x P m = − sin θ a + − θ ˙ a cos θ + b sin θ ( θ ˙ 2 a 2 + b 2 ) 1 2 r cos α + θ ˙ a sin θ + b cos θ ( θ ˙ 2 a 2 + b 2 ) 1 2 r sin α 1 y P m = cos θ a − θ ˙ a sin θ + b cos θ ( θ ˙ 2 a 2 + b 2 ) 1 2 r cos α + − θ ˙ a cos θ + b sin θ ( θ ˙ 2 a 2 + b 2 ) 1 2 r sin α 2 \left\{ \begin{matrix} {{x}_{Pm}}=-\frac{\sin \theta }{a}+\frac{-\dot{\theta }a\cos \theta +b\sin \theta }{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}r\cos \alpha +\frac{\dot{\theta }a\sin \theta +b\cos \theta }{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}r\sin \alpha \frac{{}}{{}}\frac{{}}{{}}1 \\ {{y}_{Pm}}=\frac{\cos \theta }{a}-\frac{\dot{\theta }a\sin \theta +b\cos \theta }{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}r\cos \alpha +\frac{-\dot{\theta }a\cos \theta +b\sin \theta }{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}r\sin \alpha \frac{{}}{{}}\frac{{}}{{}}2 \\ \end{matrix} \right. ⎩⎪⎨⎪⎧xPm=−asinθ+(θ˙2a2+b2)21−θ˙acosθ+bsinθrcosα+(θ˙2a2+b2)21θ˙asinθ+bcosθrsinα1yPm=acosθ−(θ˙2a2+b2)21θ˙asinθ+bcosθrcosα+(θ˙2a2+b2)21−θ˙acosθ+bsinθrsinα2
则对上式进行处理:
{ 1 sin θ - 2 cos θ : x P m sin θ − y P m cos θ = − 1 a + b ( θ ˙ 2 a 2 + b 2 ) 1 2 r cos α + θ ˙ a ( θ ˙ 2 a 2 + b 2 ) 1 2 r sin α 3 1 cos θ + 2 sin θ : x P m cos θ + y P m sin θ = θ ˙ a ( θ ˙ 2 a 2 + b 2 ) 1 2 r cos α + b ( θ ˙ 2 a 2 + b 2 ) 1 2 r sin α 4 \left\{ \begin{matrix} 1\frac{{}}{{}}\sin \theta \text{-}2\frac{{}}{{}}\cos \theta :{{x}_{Pm}}\sin \theta -{{y}_{Pm}}\cos \theta =-\frac{1}{a}+\frac{b}{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}r\cos \alpha +\frac{\dot{\theta }a}{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}r\sin \alpha \frac{{}}{{}}\frac{{}}{{}}3 \\ 1\frac{{}}{{}}\cos \theta \text{+}2\frac{{}}{{}}\sin \theta :{{x}_{Pm}}\cos \theta +{{y}_{Pm}}\sin \theta =\frac{\dot{\theta }a}{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}r\cos \alpha +\frac{b}{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}r\sin \alpha \frac{{}}{{}}\frac{{}}{{}}4 \\ \end{matrix} \right. ⎩⎪⎨⎪⎧1sinθ-2cosθ:xPmsinθ−yPmcosθ=−a1+(θ˙2a2+b2)21brcosα+(θ˙2a2+b2)21θ˙arsinα31cosθ+2sinθ:xPmcosθ+yPmsinθ=(θ˙2a2+b2)21θ˙arcosα+(θ˙2a2+b2)21brsinα4
其中根据 3 θ ˙ a b + 4 3\frac{{}}{{}}\frac{\dot{\theta }a}{b}+4 3bθ˙a+4:
( x P m sin θ − y P m cos θ ) θ ˙ a b + ( x P m cos θ + y P m sin θ ) = − θ ˙ b + θ ˙ 2 a 2 b + b ( θ ˙ 2 a 2 + b 2 ) 1 2 r sin α ({{x}_{Pm}}\sin \theta -{{y}_{Pm}}\cos \theta )\frac{\dot{\theta }a}{b}+({{x}_{Pm}}\cos \theta +{{y}_{Pm}}\sin \theta )=-\frac{{\dot{\theta }}}{b}+\frac{\frac{{{{\dot{\theta }}}^{2}}{{a}^{2}}}{b}+b}{{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}}r\sin \alpha (xPmsinθ−yPmcosθ)bθ˙a+(xPmcosθ+yPmsinθ)=−bθ˙+(θ˙2a2+b2)21bθ˙2a2+brsinα
进而求解 sin α \sin \alpha sinα:
sin α = ( x P m sin θ − y P m cos θ ) θ ˙ a + ( x P m cos θ + y P m sin θ ) b + θ ˙ r ( θ ˙ 2 a 2 + b 2 ) 1 2 \sin \alpha =\frac{({{x}_{Pm}}\sin \theta -{{y}_{Pm}}\cos \theta )\dot{\theta }a+({{x}_{Pm}}\cos \theta +{{y}_{Pm}}\sin \theta )b+\dot{\theta }}{r{{({{{\dot{\theta }}}^{2}}{{a}^{2}}+{{b}^{2}})}^{\frac{1}{2}}}} sinα=r(θ˙2a2+b2)21(xPmsinθ−yPmcosθ)θ˙a+(xPmcosθ+yPmsinθ)b+θ˙
且知: r 2 = ∣ P P O → ∣ 2 = ∣ R ⃗ P m − R ⃗ m ∣ 2 = ( x P m + sin θ a ) 2 + ( y P m − cos θ a ) 2 {{r}^{2}}=|\overrightarrow{P{{P}_{O}}}{{|}^{2}}=|{{{\vec{R}}}_{Pm}}-{{{\vec{R}}}_{m}}{{|}^{2}}={{({{x}_{Pm}}+\frac{\sin \theta }{a})}^{2}}+{{({{y}_{Pm}}-\frac{\cos \theta }{a})}^{2}} r2=∣PPO∣2=∣RPm−Rm∣2=(xPm+asinθ)2+(yPm−acosθ)2
解得: k Γ = r + sin α / k ∗ r 2 = r 2 + x P m ( θ ˙ a sin θ + b cos θ ) + y P m ( − θ ˙ a cos θ + b sin θ ) + θ ˙ a 3 r 3 {{k}_{\Gamma }}=\frac{r+\sin \alpha /k*}{{{r}^{2}}}=\frac{{{r}^{2}}+\frac{{{x}_{Pm}}(\dot{\theta }a\sin \theta +b\cos \theta )+{{y}_{Pm}}(-\dot{\theta }a\cos \theta +b\sin \theta )+\dot{\theta }}{{{a}^{3}}}}{{{r}^{3}}} kΓ=r2r+sinα/k∗=r3r2+a3xPm(θ˙asinθ+bcosθ)+yPm(−θ˙acosθ+bsinθ)+θ˙
令: G = r 3 G={{r}^{3}} G=r3,整理分子后可得: k Γ = ( x P m + B ) 2 + ( y P m + C ) 2 + 1 4 k ∗ 2 G , B = b cos θ + ( 2 a + θ ˙ ) a sin θ 2 a 3 , C = b sin θ − ( 2 a + θ ˙ ) a cos θ 2 a 3 {{k}_{\Gamma }}=\frac{{{({{x}_{Pm}}+B)}^{2}}+{{({{y}_{Pm}}+C)}^{2}}+\frac{1}{4{{k}^{*}}^{2}}}{G},B=\frac{b\cos \theta +(2a+\dot{\theta })a\sin \theta }{2{{a}^{3}}},C=\frac{b\sin \theta -(2a+\dot{\theta })a\cos \theta }{2{{a}^{3}}} kΓ=G(xPm+B)2+(yPm+C)2+4k∗21,B=2a3bcosθ+(2a+θ˙)asinθ,C=2a3bsinθ−(2a+θ˙)acosθ
若在某一瞬时点
P
P
P轨迹曲线
Γ
P
{{\Gamma }_{P}}
ΓP的曲率
k
Γ
{{k}_{\Gamma }}
kΓ为零,即该点三个无限接近位置在一直线上,或者说轨迹曲线
Γ
P
{{\Gamma }_{P}}
ΓP与直线二阶接触,称其为该轨迹曲线
Γ
P
{{\Gamma }_{P}}
ΓP上的拐点。令
r
+
sin
α
/
k
∗
r
2
\frac{r+\sin \alpha /k*}{{{r}^{2}}}
r2r+sinα/k∗为零,可得∶
r
+
D
sin
α
=
0
r+D\sin \alpha =0
r+Dsinα=0
其中:
D
=
1
k
∗
D=\frac{1}{k*}
D=k∗1










![[附源码]java毕业设计血库管理系统](https://img-blog.csdnimg.cn/12157055f10347c392c0c1c272c5e3f0.png)