文章目录
- 一、马尔科夫过程Markov Decision Process(MDP)
- 1.简介
- 2、Markov 特性
- 3、Markov 奖励过程
- 符号表示
- MRPs的贝尔曼方程
- 4、Markov决策过程
- 符号表示
- 转化
- MRPs的贝尔曼方程
- 优化问题
- 贝尔曼最优方程
- 二、价值迭代求解
- 1、回顾
- 2、算法
- 3、案例
- 案例1
- 案例2
- 三、策略迭代求解
- 1、回顾
- 2、算法
- 3、案例
- 案例1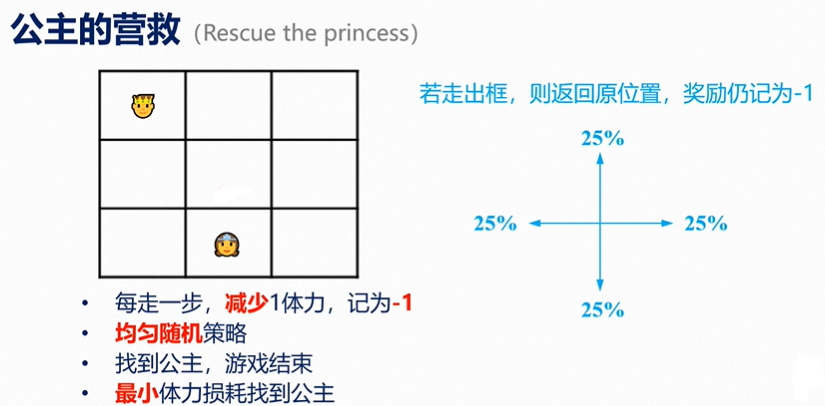
- 四、雅克比迭代法解决自举问题
- 1、自举问题
- 2、雅克比迭代
- 列主原消去法
- 雅克比迭代法
- 五、蒙特卡洛解决无模型强化学习
- 1、无模型
- 2、优势
- 3、原理
- 经验平均
- 首次访问/每次访问
- 同策略/异策略
- 批处理/增量式
- 4、案例
- 参考
一、马尔科夫过程Markov Decision Process(MDP)
1.简介
定义:无记忆的随机过程。
2、Markov 特性
1.历史状态ht={s1,s2,s3,……,st}
2.状态st有且仅有:
p ( st+1 | st )=p ( st+1 | ht )
p ( st+1 | st , at )=p ( st+1 | ht , at )
3.“考虑到现在,未来是独立于过去的”
3、Markov 奖励过程
符号表示
有四个符号
<
S
,
P
,
R
,
γ
>
<S,P,R,γ>
<S,P,R,γ>
S
S
S:有限状态集合;
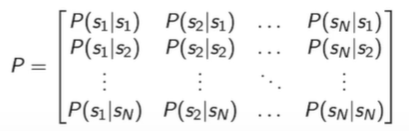
P
P
P:状态转移概率矩阵
P
s
s
′
=
p
(
s
t
+
1
=
s
′
∣
s
t
=
s
)
P_{ss'}=p ( s_{t+1} = s' | s_t = s )
Pss′=p(st+1=s′∣st=s);表现为,既当前状态为
s
t
=
s
s_t=s
st=s时,下一个状态变为
s
t
+
1
=
s
′
s_{t+1}= s'
st+1=s′的概率。
R
R
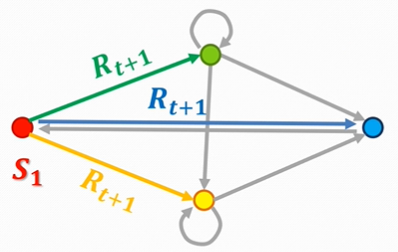
R:奖励函数
R
S
=
E
[
R
t
+
1
∣
S
t
=
s
]
R_S=E[R_{t+1}|S_t=s]
RS=E[Rt+1∣St=s] ,既状态单次转换取得的收益;如下图所示
γ
γ
γ:折扣因子/衰减系数
γ
∈
[
0
,
1
]
γ∈[0,1]
γ∈[0,1]。
回报:
G
t
G_t
Gt是从时间
t
t
t开始的总折扣奖励,如下式
G
t
=
R
t
+
1
+
γ
R
t
+
2
+
γ
2
R
t
+
3
+
.
.
.
=
∑
k
=
0
∞
γ
k
R
t
+
k
+
1
G_t=R_{t+1}+γR_{t+2}+γ^{2}R_{t+3}+...=\sum_{k=0}^{\infty}{γ^{k}R_{t+k+1}}
Gt=Rt+1+γRt+2+γ2Rt+3+...=k=0∑∞γkRt+k+1
值函数:
V
(
s
)
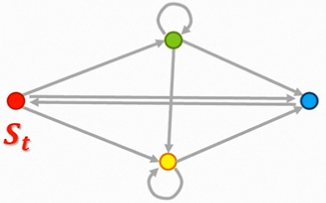
V(s)
V(s)表示一个状态
s
s
s的长期价值
V
(
s
)
=
E
[
G
t
∣
S
t
=
s
]
V(s)=E[G_t|S_t=s]
V(s)=E[Gt∣St=s],如下图所示

MRPs的贝尔曼方程
已知,
G
t
=
R
t
+
1
+
γ
G
(
S
t
+
1
)
G_t=R_{t+1}+γG(S_{t+1})
Gt=Rt+1+γG(St+1)
可得,
V
(
s
)
=
E
[
R
t
+
1
+
γ
G
(
S
t
+
1
)
∣
S
t
=
s
]
V(s)=E[R_{t+1}+γG(S_{t+1})|S_t=s]
V(s)=E[Rt+1+γG(St+1)∣St=s]
已知,
R
S
=
E
[
R
t
+
1
∣
S
t
=
S
]
P
s
s
′
=
P
[
S
t
+
1
=
s
′
∣
S
t
=
s
]
R_S=E[R_{t+1}|S_t=S] \\ P_{ss'}=P[S_{t+1}=s'|S_t=s]
RS=E[Rt+1∣St=S]Pss′=P[St+1=s′∣St=s]
可得,
V
(
s
)
=
R
S
+
γ
∑
s
′
∈
S
P
s
s
′
V
(
s
′
)
V(s)=R_S+γ\sum_{s'∈S}P_{ss'}V(s')
V(s)=RS+γs′∈S∑Pss′V(s′)
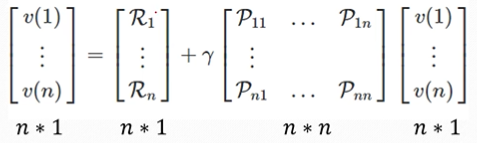
矩阵形式如下,
V
=
R
+
γ
P
V
(
1
−
γ
P
)
V
=
R
V
=
(
1
−
γ
P
)
−
1
R
V=R+γPV\\ (1-γP)V=R\\ V=(1-γP)^{-1}R
V=R+γPV(1−γP)V=RV=(1−γP)−1R
常用求解方法有动态规划、蒙特卡洛评估、时序差分学习等。
4、Markov决策过程
符号表示
有五个符号
<
S
,
A
,
P
,
R
,
γ
>
<S,A,P,R,γ>
<S,A,P,R,γ>
S
S
S:有限状态集合;
A
A
A:有限动作集合;
P
P
P:状态转移概率矩阵
P
s
s
′
a
=
p
(
s
t
+
1
=
s
′
∣
s
t
=
s
,
A
t
=
a
)
P_{ss'}^{a}=p (s_{t+1} = s' | s_t = s,A_t=a)
Pss′a=p(st+1=s′∣st=s,At=a);状态转移矩阵 P 表现为,既当前状态为
s
t
=
s
s_t=s
st=s时,下一个状态变为
s
t
+
1
=
s
′
s_{t+1}= s'
st+1=s′的概率。
R
R
R:奖励函数
R
S
a
=
E
[
R
t
+
1
∣
S
t
=
s
,
A
t
=
a
]
R_S^{a}=E[R_{t+1}|S_t=s,A_t=a]
RSa=E[Rt+1∣St=s,At=a] ,既状态单次转换取得的收益;
γ
γ
γ:折扣因子/衰减系数
γ
∈
[
0
,
1
]
γ∈[0,1]
γ∈[0,1]。
策略:
π
π
π为给定状态的动作分布
π
(
a
∣
s
)
=
P
[
A
t
=
a
∣
S
t
=
s
]
π(a|s)=P[A_t=a|S_t=s]
π(a∣s)=P[At=a∣St=s]。
其中策略依赖于当前状态(无关历史);也是固定的(无关时间),
A
t
∼
π
(
⋅
∣
S
t
)
A_t\thicksim π(\cdot|S_t)
At∼π(⋅∣St),任意
t
>
0
t>0
t>0
转化
给定一个Markov决策过程
M
=
<
S
,
A
,
P
,
R
,
γ
>
M=<S,A,P,R,γ>
M=<S,A,P,R,γ>和策略
π
π
π,可以转化为Markov过程
<
S
,
P
>
<S,P>
<S,P>和Markov奖励过程
<
S
,
P
,
R
,
γ
>
<S,P,R,γ>
<S,P,R,γ>
P
s
,
s
′
π
=
∑
a
∈
A
π
(
a
∣
s
)
P
s
,
s
′
a
R
s
π
=
∑
a
∈
A
π
(
a
∣
s
)
R
s
a
P_{s,s'}^π=\sum_{a∈A}{\pi (a|s)P_{s,s'}^a}\\ R_{s}^\pi=\sum_{a∈A}{\pi (a|s)}R_{s}^a
Ps,s′π=a∈A∑π(a∣s)Ps,s′aRsπ=a∈A∑π(a∣s)Rsa
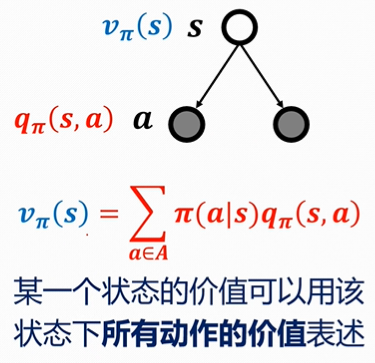
状态值函数:
V
(
s
)
=
E
[
G
t
∣
S
t
=
s
]
V(s)=E[G_t|S_t=s]
V(s)=E[Gt∣St=s]。
动作值函数:
q
π
(
s
,
a
)
=
E
π
[
G
t
∣
S
t
=
s
,
A
t
=
a
]
q_\pi(s,a)=E_\pi[G_t|S_t=s,A_t=a]
qπ(s,a)=Eπ[Gt∣St=s,At=a]。
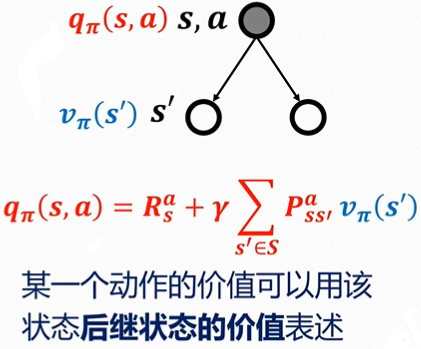
MRPs的贝尔曼方程
已知,
G
t
=
R
t
+
1
+
γ
G
(
S
t
+
1
)
G_t=R_{t+1}+γG(S_{t+1})
Gt=Rt+1+γG(St+1)
状态值函数:
V
(
s
)
=
E
[
R
t
+
1
+
γ
G
(
S
t
+
1
)
∣
S
t
=
s
]
V(s)=E[R_{t+1}+γG(S_{t+1})|S_t=s]
V(s)=E[Rt+1+γG(St+1)∣St=s]
动作值函数
q
π
(
s
,
a
)
=
E
[
R
t
+
1
+
γ
G
(
S
t
+
1
)
∣
S
t
=
s
,
A
t
=
a
]
q_\pi(s,a)=E[R_{t+1}+γG(S_{t+1})|S_t=s,A_t=a]
qπ(s,a)=E[Rt+1+γG(St+1)∣St=s,At=a]
优化问题
最优状态值函数
v
∗
(
s
)
=
max
π
v
π
(
s
)
v_*(s)=\max_\pi v_\pi(s)
v∗(s)=πmaxvπ(s)
最优动作值函数
q
∗
(
s
,
a
)
=
max
π
q
π
(
s
,
a
)
q_*(s,a)=\max_\pi q_\pi(s,a)
q∗(s,a)=πmaxqπ(s,a)
最优策略
存在一个最优策略,使得
π
∗
≥
a
n
y
π
\pi_*≥any\pi
π∗≥anyπ
所有最优策略都能取得最优状态、动作值函数
注:若
v
π
′
(
s
)
≥
v
π
(
s
)
v_{\pi'}(s)≥v_{\pi}(s)
vπ′(s)≥vπ(s)则
π
′
>
π
\pi'>\pi
π′>π
π
∗
(
a
∣
s
)
=
{
1
,
i
f
a
=
arg max
a
∈
A
q
∗
(
s
,
a
)
0
,
o
t
h
e
r
w
i
s
e
\pi_*(a|s)= \left \{ \begin{array}{ll} 1, & if a = \argmax_{a∈A} q_*(s,a)\\ 0, & otherwise \end{array} \right.
π∗(a∣s)={1,0,ifa=a∈Aargmaxq∗(s,a)otherwise
贝尔曼最优方程
目标为,
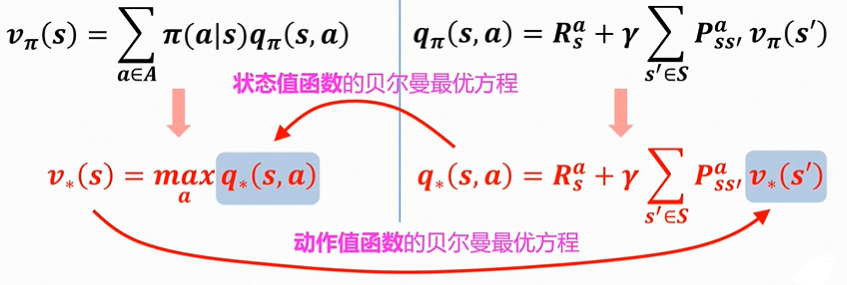
得到迭代式,
求解方案有:值迭代、策略迭代、Q-Learning、Sarsa等
二、价值迭代求解
1、回顾
策略:是给定状态的动作分布 π ( a ∣ s ) = P [ A t = a ∣ S t = s ] \pi(a|s)=P[A_t=a|S_t=s] π(a∣s)=P[At=a∣St=s]随机变量,其中策略依赖于当前状态(无关历史);也是固定的(无关时间), A t ∼ π ( ⋅ ∣ S t ) A_t\thicksim π(\cdot|S_t) At∼π(⋅∣St),任意 t > 0 t>0 t>0
2、算法
算法参数:小阈值 θ > 0 \theta>0 θ>0;初始化 V ( s ) V(s) V(s),初值为0。
Loop:
△
←
0
\triangle \gets 0
△←0
Loop for each
s
∈
S
s∈S
s∈S:
v
←
V
(
s
)
v \gets V(s)
v←V(s)
V
(
s
)
←
max
a
∑
s
′
,
r
p
(
s
′
,
r
∣
s
,
a
)
[
r
+
γ
V
(
s
′
)
]
V(s) \gets \max_a \sum_{s',r}p(s',r|s,a)[r+γV(s')]
V(s)←maxa∑s′,rp(s′,r∣s,a)[r+γV(s′)]
△
←
max
(
△
,
∣
v
−
V
(
s
)
∣
)
\triangle \gets \max (\triangle,|v-V(s)|)
△←max(△,∣v−V(s)∣)
until
△
<
θ
\triangle < \theta
△<θ
输出确定的策略, π ≈ π ∗ \pi \approx \pi_* π≈π∗, π ( s ) = arg max a ∑ s ′ , r p ( s ′ , r ∣ s , s ) [ r + γ V ( s ′ ) ] \pi(s)=\argmax_a \sum_{s',r} p(s',r|s,s)[r+γV(s')] π(s)=aargmaxs′,r∑p(s′,r∣s,s)[r+γV(s′)]
3、案例
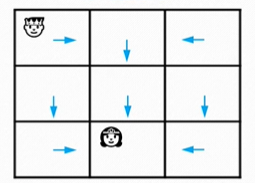
案例1

此处R为-1,γ为 1。
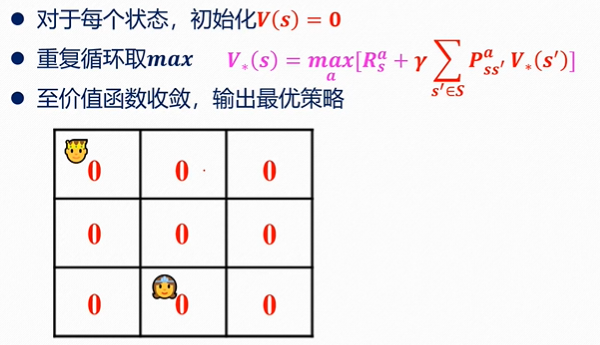
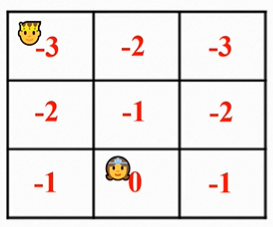
“公主”处没有下一状态,因此V(s)=0。
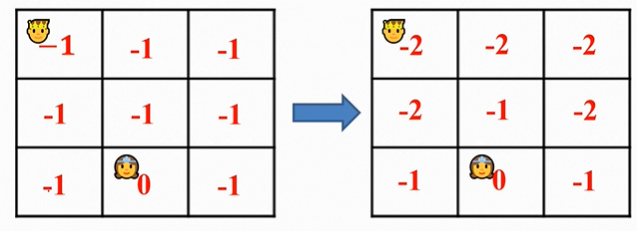
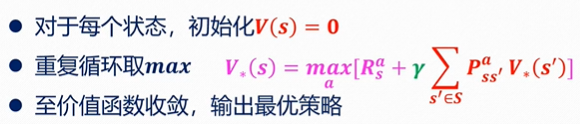
最终收敛为,
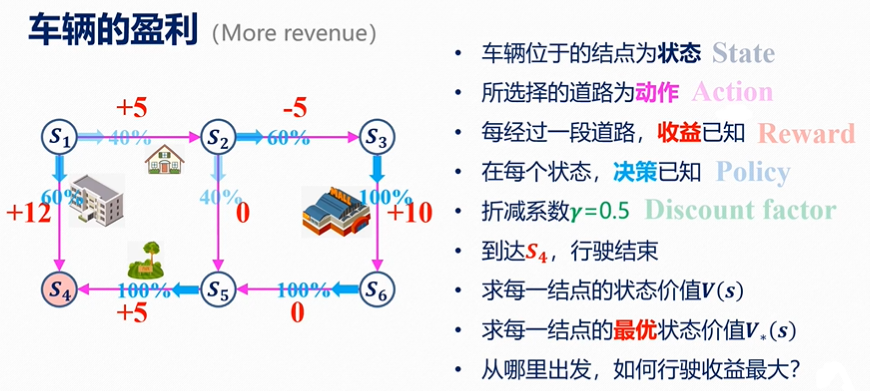
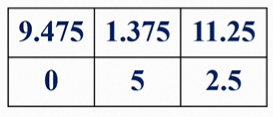
案例2
V
π
(
s
)
=
∑
a
∈
A
π
(
a
∣
s
)
[
R
s
a
+
γ
∑
s
′
∈
S
P
s
s
′
a
V
π
(
s
′
)
]
\boldsymbol{V}_\pi {(s)}=\sum_{a \in A} \pi(a \mid s)\left[R_s^a+\gamma \sum_{s^{\prime} \in S} P_{s s^{\prime}}^a V_\pi\left(s^{\prime}\right)\right]
Vπ(s)=a∈A∑π(a∣s)[Rsa+γs′∈S∑Pss′aVπ(s′)]
可得,
V
π
(
S
1
)
=
40
%
(
5
+
0.5
V
π
(
S
2
)
)
+
60
%
(
12
+
0.5
V
π
(
S
4
)
)
V
π
(
S
6
)
=
100
%
(
0
+
0.5
V
π
(
S
5
)
)
V
π
(
S
2
)
=
60
%
(
−
5
+
0.5
V
π
(
S
3
)
)
+
40
%
(
0
+
0.5
V
π
(
S
5
)
)
V
π
(
S
5
)
=
100
%
(
5
+
0.5
V
π
(
S
4
)
)
V
π
(
S
3
)
=
100
%
(
10
+
0.5
V
π
(
S
6
)
)
V
π
(
S
4
)
=
0
\begin{array}{ll} V_\pi\left({S}_1\right)=40 \%\left(5+0.5 V_\pi\left(S_2\right)\right)+60 \%\left(12+0.5 V_\pi\left(S_4\right)\right) & {V}_\pi\left({S}_6\right)=100 \%\left(0+0.5 V_\pi\left(S_5\right)\right) \\ {V}_\pi\left({S}_2\right)=60 \%\left(-5+0.5 V_\pi\left(S_3\right)\right)+40 \%\left(0+0.5 V_\pi\left(S_5\right)\right) & {V}_\pi\left({S}_5\right)=100 \%\left(5+0.5 V_\pi\left(S_4\right)\right) \\ {V}_\pi\left({S}_3\right)=100 \%\left(10+0.5 V_\pi\left(S_6\right)\right) & {V}_\pi\left({S}_4\right)=0 \end{array}
Vπ(S1)=40%(5+0.5Vπ(S2))+60%(12+0.5Vπ(S4))Vπ(S2)=60%(−5+0.5Vπ(S3))+40%(0+0.5Vπ(S5))Vπ(S3)=100%(10+0.5Vπ(S6))Vπ(S6)=100%(0+0.5Vπ(S5))Vπ(S5)=100%(5+0.5Vπ(S4))Vπ(S4)=0
到的结果,
计算最优价值,
三、策略迭代求解
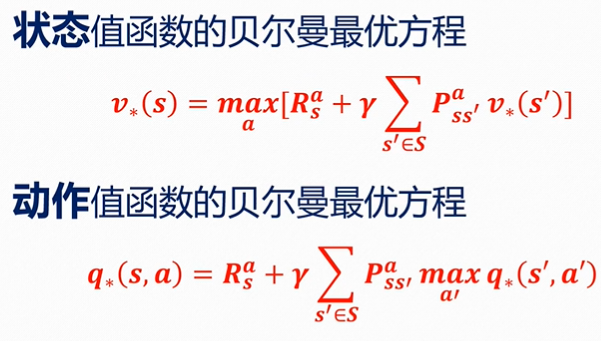
1、回顾
状态价值函数的贝尔曼最优方程
v
∗
(
s
)
=
max
a
[
R
s
a
+
γ
∑
s
′
∈
S
P
s
s
′
a
v
∗
(
s
′
)
]
v_*(s)=\max _a\left[R_s^a+\gamma \sum_{s^{\prime} \in S} P_{s s^{\prime}}^a v_*\left(s^{\prime}\right)\right]
v∗(s)=amax[Rsa+γs′∈S∑Pss′av∗(s′)]
动作价值函数的贝尔曼最优方程
q
∗
(
s
,
a
)
=
R
s
a
+
γ
∑
s
′
∈
S
P
s
s
′
a
max
a
′
q
∗
(
s
′
,
a
′
)
{q}_*(s, a)={R}_s^a+\gamma \sum_{s^{\prime} \in S} {P}_{s s^{\prime}}^a \max _{a^{\prime}} {q}_*\left(s^{\prime}, a^{\prime}\right)
q∗(s,a)=Rsa+γs′∈S∑Pss′aa′maxq∗(s′,a′)
2、算法
初始化:
小阈值
θ
>
0
\theta>0
θ>0;初始化
V
(
s
)
V(s)
V(s),初值可以为0;初始化
π
(
s
)
π(s)
π(s)。
策略评估:
Loop:
△
←
0
\triangle \gets 0
△←0
Loop for each
s
∈
S
s∈S
s∈S:
v
←
V
(
s
)
v \gets V(s)
v←V(s)
V
(
s
)
←
max
a
∑
s
′
,
r
p
(
s
′
,
r
∣
s
,
a
)
[
r
+
γ
V
(
s
′
)
]
V(s) \gets \max_a \sum_{s',r}p(s',r|s,a)[r+γV(s')]
V(s)←maxa∑s′,rp(s′,r∣s,a)[r+γV(s′)]
△
←
max
(
△
,
∣
v
−
V
(
s
)
∣
)
\triangle \gets \max (\triangle,|v-V(s)|)
△←max(△,∣v−V(s)∣)
until
△
<
θ
\triangle < \theta
△<θ
策略提升:
p
o
l
i
c
y
−
s
t
a
b
l
e
←
t
r
u
e
policy-stable←true
policy−stable←true
For each
s
∈
S
s∈S
s∈S:
o
l
d
−
a
c
t
i
o
n
←
π
(
s
)
old-action←\pi(s)
old−action←π(s)
π
(
s
)
←
arg max
a
∑
s
′
,
r
p
(
s
′
,
r
∣
s
,
s
)
[
r
+
γ
V
(
s
′
)
]
\pi(s)←\argmax_a \sum_{s',r} p(s',r|s,s)[r+γV(s')]
π(s)←aargmax∑s′,rp(s′,r∣s,s)[r+γV(s′)]
If
o
l
d
−
a
c
t
i
o
n
≠
π
(
s
)
old-action \ne \pi(s)
old−action=π(s),then
p
o
l
i
c
e
−
s
t
a
b
l
e
←
f
a
l
s
e
police-stable←false
police−stable←false
If
p
o
l
i
c
e
−
s
t
a
b
l
e
police-stable
police−stable,then stop and return
V
≈
v
V \approx v
V≈v and
π
≈
v
π
∗
\pi \approx v\pi_*
π≈vπ∗;else go to “策略评估”
3、案例
案例1
此时,
state:王子的位置
action:向四个方向走一格(走出界返回原位,但消耗体力)
reward:体力损耗
discount factor:γ=1
policy:均匀随机策略
策略评估:
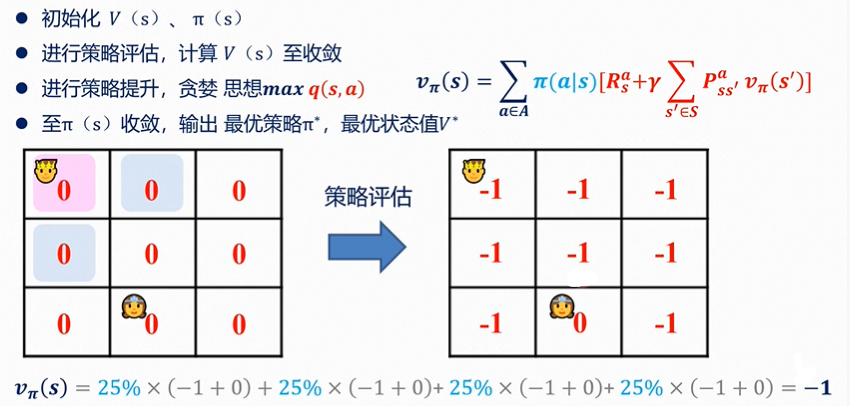
最终结果(取三次迭代,因为γ为一无法收敛)
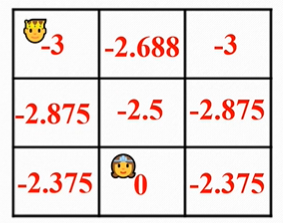
策略提升:

得到结果,
然后再返回“策略评估”,如此往复,直至“策略”收敛。
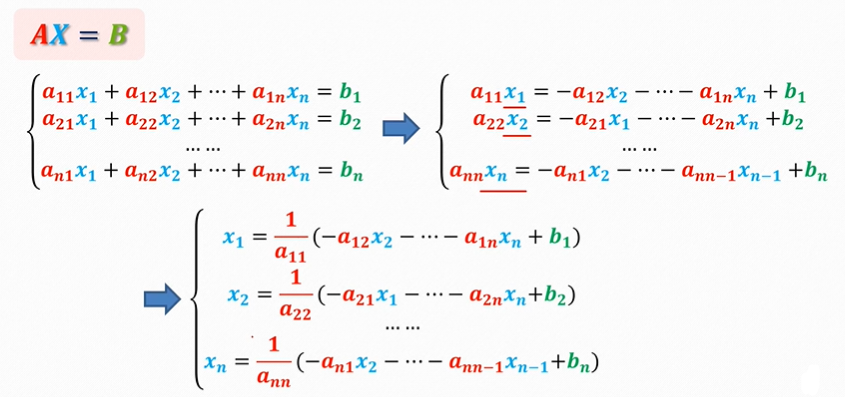
四、雅克比迭代法解决自举问题
1、自举问题
根据上文,可知如下公式:
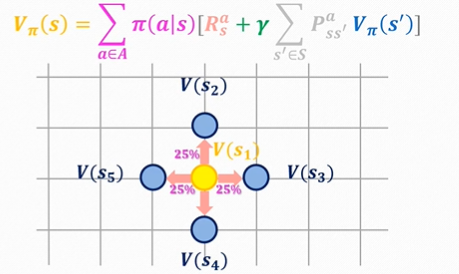
网格上每个点表示各自的状态;策略
π
π
π采取均匀随机策略,因此每个方向都为25%;
R
R
R为即时奖励;由于我们为确定性策略,因此
P
P
P这一项都为1,。
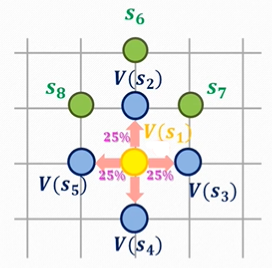
问题出现了,想要计算蓝色,那么就要求黄色;想要求黄色,就需要计算蓝色。这样“你中有我,我中有你”,的问题,便是“自举问题”。
V
(
s
1
)
=
1
+
0.25
V
(
s
2
)
+
0.25
V
(
s
3
)
+
0.25
V
(
s
4
)
+
0.25
V
(
s
5
)
V
(
s
2
)
=
1
+
0.25
V
(
s
1
)
+
0.25
V
(
s
6
)
+
0.25
V
(
s
7
)
+
0.25
V
(
s
8
)
V
(
s
3
)
=
1
+
0.25
V
(
s
1
)
+
0.25
V
(
s
7
)
+
0.25
V
(
s
9
)
+
0.25
V
(
s
10
)
…
.
.
.
V
(
s
n
)
=
b
+
a
1
V
(
s
i
)
+
a
2
V
(
s
j
)
+
a
3
V
(
s
k
)
+
a
4
V
(
s
l
)
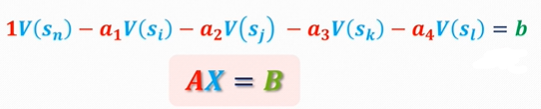
\begin{gathered} V\left(s_1\right)=1+0.25 V\left(s_2\right)+0.25 V\left(s_3\right)+0.25 V\left(s_4\right)+0.25 V\left(s_5\right) \\ V\left(s_2\right)=1+0.25 V\left(s_1\right)+0.25 V\left(s_6\right)+0.25 V\left(s_7\right)+0.25 V\left(s_8\right) \\ V\left(s_3\right)=1+0.25 V\left(s_1\right)+0.25 V\left(s_7\right)+0.25 V\left(s_9\right)+0.25 V\left(s_{10}\right) \\ \ldots . . . \\ \boldsymbol{V}\left(\boldsymbol{s}_{\boldsymbol{n}}\right)=\boldsymbol{b}+\boldsymbol{a}_{\mathbf{1}} \boldsymbol{V}\left(\boldsymbol{s}_{\boldsymbol{i}}\right)+\boldsymbol{a}_{\mathbf{2}} \boldsymbol{V}\left(\boldsymbol{s}_{\boldsymbol{j}}\right)+\boldsymbol{a}_{\mathbf{3}} \boldsymbol{V}\left(\boldsymbol{s}_{\boldsymbol{k}}\right)+\boldsymbol{a}_{\boldsymbol{4}} \boldsymbol{V}\left(\boldsymbol{s}_{\boldsymbol{l}}\right) \end{gathered}
V(s1)=1+0.25V(s2)+0.25V(s3)+0.25V(s4)+0.25V(s5)V(s2)=1+0.25V(s1)+0.25V(s6)+0.25V(s7)+0.25V(s8)V(s3)=1+0.25V(s1)+0.25V(s7)+0.25V(s9)+0.25V(s10)…...V(sn)=b+a1V(si)+a2V(sj)+a3V(sk)+a4V(sl)
由此可以得到矩阵形式:
2、雅克比迭代
列主原消去法
为线性代数的基本功,只适用于低阶稠密矩阵,故不再做赘述,案例如下:
[
1
2
3
4
5
6
7
8
8
]
[
x
1
x
2
x
3
]
=
[
b
1
b
2
b
3
]
7
x
1
+
8
x
2
+
8
x
3
=
b
3
0
x
1
+
6
7
x
2
+
13
7
x
3
=
b
1
−
1
7
b
3
0
x
1
+
0
x
2
+
7
14
x
3
=
b
1
−
1
2
b
2
−
3
7
b
3
\begin{aligned} &{\left[\begin{array}{lll} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 8 \end{array}\right]\left[\begin{array}{l} x_1 \\ x_2 \\ x_3 \end{array}\right]=\left[\begin{array}{l} b_1 \\ b_2 \\ b_3 \end{array}\right]} \\ &7 x_1+8 x_2+8 x_3=b_3 \\ &0 x_1+\frac{6}{7} x_2+\frac{13}{7} x_3=b_1-\frac{1}{7} b_3 \\ &0 x_1+0 x_2+\frac{7}{14} x_3=b_1-\frac{1}{2} b_2-\frac{3}{7} b_3 \end{aligned}
⎣⎡147258368⎦⎤⎣⎡x1x2x3⎦⎤=⎣⎡b1b2b3⎦⎤7x1+8x2+8x3=b30x1+76x2+713x3=b1−71b30x1+0x2+147x3=b1−21b2−73b3
雅克比迭代法
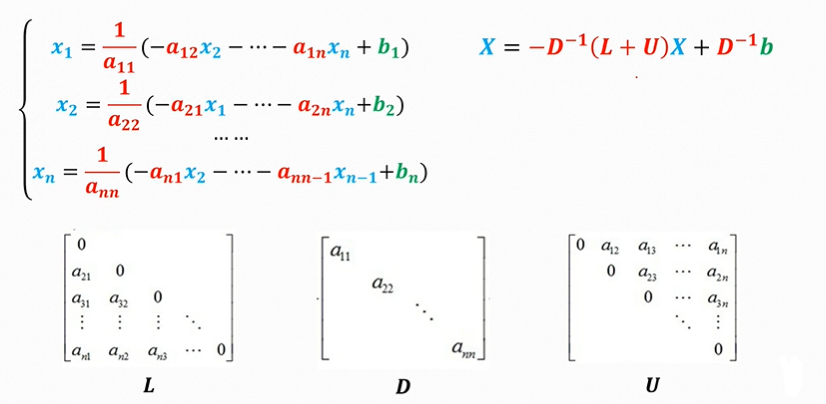
将上图右上角式子进一步简化,得到迭代式(直至收敛),
X
←
J
X
+
f
X←JX+f
X←JX+f
其中,谱半径
ρ
(
J
)
<
1
ρ(J)<1
ρ(J)<1。谱半径定义为:一个矩阵中特征值绝对值最大的那个值。
五、蒙特卡洛解决无模型强化学习
1、无模型
Markov决策过程中有五个符号
<
S
,
A
,
P
,
R
,
γ
>
<S,A,P,R,γ>
<S,A,P,R,γ>
S
S
S:有限状态集合;
A
A
A:有限动作集合;
P
P
P:状态转移概率矩阵
P
s
s
′
a
=
p
(
s
t
+
1
=
s
′
∣
s
t
=
s
,
A
t
=
a
)
P_{ss'}^{a}=p (s_{t+1} = s' | s_t = s,A_t=a)
Pss′a=p(st+1=s′∣st=s,At=a);
R
R
R:奖励函数
R
S
a
=
E
[
R
t
+
1
∣
S
t
=
s
,
A
t
=
a
]
R_S^{a}=E[R_{t+1}|S_t=s,A_t=a]
RSa=E[Rt+1∣St=s,At=a];
γ
γ
γ:折扣因子/衰减系数
γ
∈
[
0
,
1
]
γ∈[0,1]
γ∈[0,1]。
此时只知道
S
S
S和
A
A
A,其他参数未知。
2、优势
(1)能从环境中交互学习,在模拟实验中学习,无环境模型。
(2)可以只聚焦于一个子状态空间,例如我们感兴趣的状态;方法理论上需要遍历所有状态空间
(3)不需要从其他值的模拟中迭代,不自举,如果马尔可夫属性不够,可以受到更小的影响
3、原理
经验平均
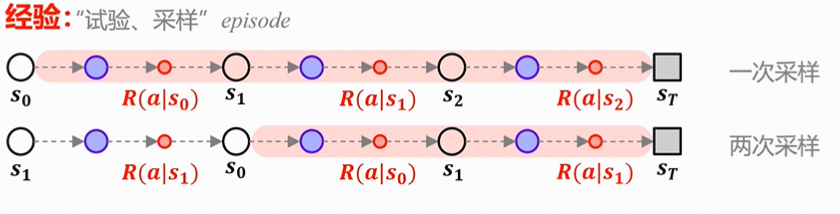
求平均:
Q
1
(
s
0
)
=
R
(
a
∣
s
0
)
+
γ
R
(
a
∣
s
1
)
+
γ
2
R
(
a
∣
s
2
)
Q
2
(
s
0
)
=
R
(
a
∣
s
0
)
+
γ
R
(
a
∣
s
1
)
}
Q
(
s
0
)
=
Q
1
(
s
0
)
+
Q
2
(
s
0
)
2
\left.\begin{array}{l} Q_1\left(s_0\right)=R\left(a \mid s_0\right)+\gamma R\left(a \mid s_1\right)+\gamma^2 R\left(a \mid s_2\right) \\ Q_2\left(s_0\right)=R\left(a \mid s_0\right)+\gamma R\left(a \mid s_1\right) \end{array}\right\} Q\left(s_0\right)=\frac{Q_1\left(s_0\right)+Q_2\left(s_0\right)}{2}
Q1(s0)=R(a∣s0)+γR(a∣s1)+γ2R(a∣s2)Q2(s0)=R(a∣s0)+γR(a∣s1)}Q(s0)=2Q1(s0)+Q2(s0)
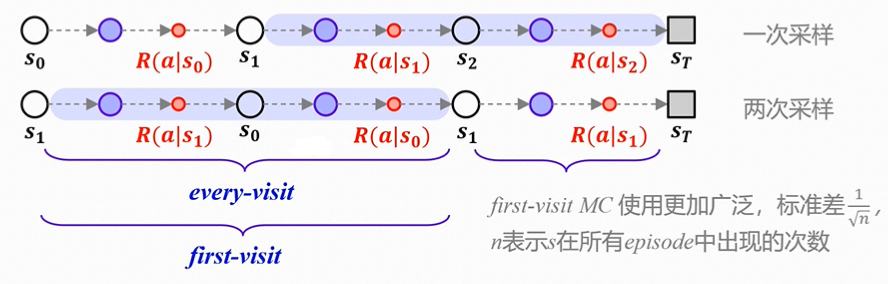
首次访问/每次访问
如图,如果每次s1出现都记录,则被称为every-visit(每次访问);只记录第一次出现,则被称为first-visit(首次访问)。
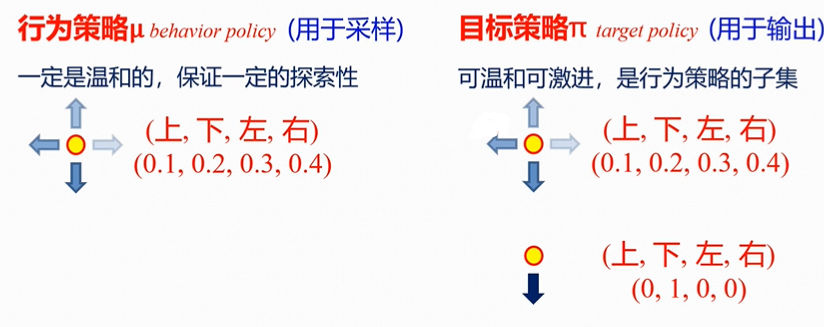
同策略/异策略
行为策略
μ
μ
μ(用于采样)
一般是温和的,保证一定的探索性。
ε
−
g
r
e
e
d
y
策
略
\varepsilon-greedy策略
ε−greedy策略如下
π
(
a
∣
s
)
=
{
1
−
ε
+
ε
∣
A
(
s
)
∣
a
=
argmax
a
Q
(
s
,
a
)
ε
∣
A
(
s
)
∣
else
\pi(a \mid s)=\left\{\begin{array}{cl} 1-\varepsilon+\frac{\varepsilon}{|A(s)|} & a=\operatorname{argmax}_a Q(s, a) \\ \frac{\varepsilon}{|A(s)|} & \text { else } \end{array} \right.
π(a∣s)={1−ε+∣A(s)∣ε∣A(s)∣εa=argmaxaQ(s,a) else
目标策略
π
π
π(用于输出)
可温和可激进,是行为策略的子集。
g
r
e
e
d
y
策
略
greedy策略
greedy策略如下
π
(
a
∣
s
)
=
{
1
a
=
argmax
a
Q
(
s
,
a
)
0
else
\pi(a \mid s)= \begin{cases}1 & a=\operatorname{argmax}_a Q(s, a) \\ 0 & \text { else }\end{cases}
π(a∣s)={10a=argmaxaQ(s,a) else
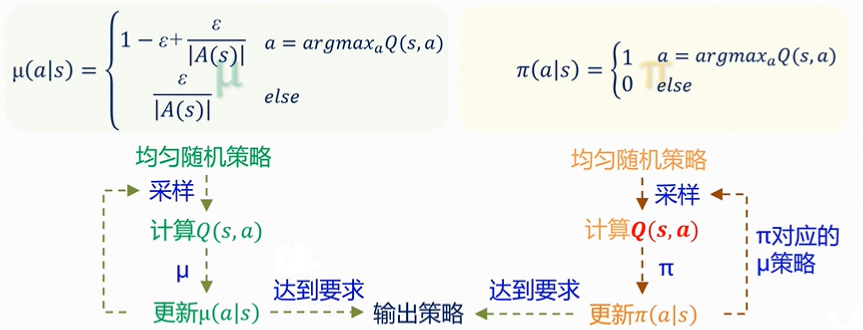
上图左侧为同策略(on-policy),右侧为异策略(off-policy)。
批处理/增量式
批处理:batch for off-line,累加求平均值,空间换时间,更快。
增量式:increment for on-line,
上
一
阶
段
平
均
值
∗
(
N
−
1
)
+
K
N
N
\frac{上一阶段平均值*(N-1)+K_N}{N}
N上一阶段平均值∗(N−1)+KN,其中N为个数,
K
N
K_N
KN为第N个数的数值。
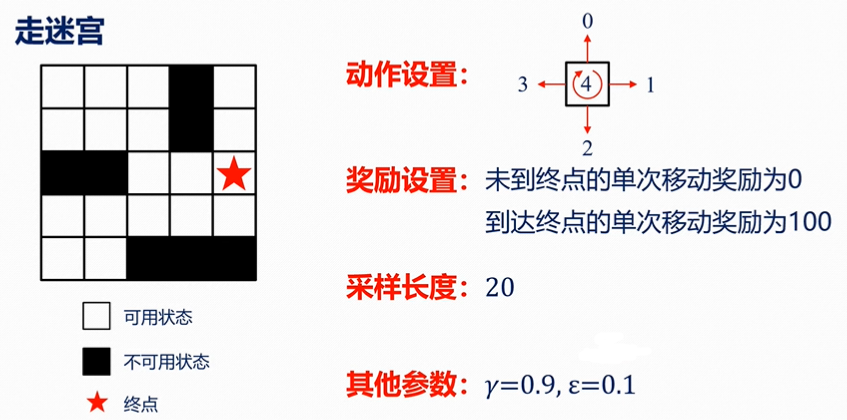
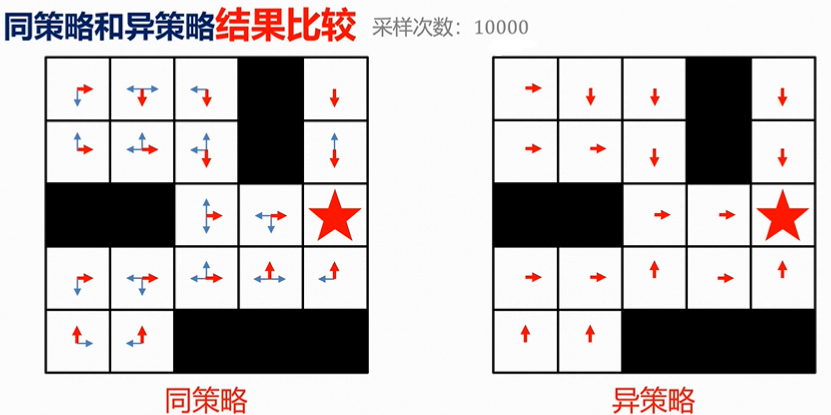
4、案例
参考
做了一些勘误
马尔可夫决策MDP过程讲解,新手也能看懂!


![[附源码]java毕业设计学生宿舍管理系统设计](https://img-blog.csdnimg.cn/19ef6af27f4b4467b9e7ca2dbf988e55.png)
![[附源码]java毕业设计新生入学计算机配号系统](https://img-blog.csdnimg.cn/00c20b40dd8c402d884c23787959201f.png)