文章目录
- 一、版本说明与技术背景
- 1.1 Gazebo 版本分支
- 1.2 版本选择建议
- 二、系统环境准备
- 2.1 硬件要求
- 2.2 软件依赖
- 三、Gazebo Garden 安装流程
- 3.1 添加官方软件源
- 3.2 执行安装命令
- 3.3 环境验证
- 四、Gazebo Classic 安装方法
- 4.1 添加软件仓库
- 4.2 安装核心组件
- 4.3 验证安装
- 五、基础使用教程
- 5.1 Gazebo Garden 操作
- 5.2 Gazebo Classic 操作
- 六、常见问题排错指南
- 6.1 图形渲染异常
- 6.2 物理引擎错误
- 七、版本兼容性说明
- 八、进阶配置建议
- 8.1 多版本共存配置
- 8.2 GPU加速配置
- 参考文献
一、版本说明与技术背景
1.1 Gazebo 版本分支
Gazebo 目前存在两个主要分支:
- Gazebo Classic (gazebo11/gazebo7):传统版本,由 Open Robotics 开发,现已移交社区维护
- Gazebo Garden:新一代仿真平台,采用模块化架构,整合了 Gazebo、Ignition 和 Fortress 技术
1.2 版本选择建议
- 需要兼容 ROS 1/ROS 2 Humble 及以下版本:选择 Gazebo Classic
- 需要最新物理引擎和渲染功能:选择 Gazebo Garden
- 新项目建议优先考虑 Gazebo Garden
二、系统环境准备
2.1 硬件要求
- 最低配置:
- CPU: 4核 x86_64 处理器
- 内存: 8 GB DDR4
- GPU: NVIDIA GTX 1050 / AMD RX 560
- 推荐配置:
- CPU: 6核以上支持AVX指令集
- 内存: 16 GB DDR4
- GPU: NVIDIA RTX 2060 或更高
2.2 软件依赖
sudo apt update && sudo apt upgrade -y
sudo apt install -y \
cmake \
curl \
git \
libfreeimage-dev \
libprotoc-dev \
protobuf-compiler \
libignition-math6-dev \
libsqlite3-dev \
libtinyxml2-dev \
libgflags-dev \
libavformat-dev \
libavcodec-dev
三、Gazebo Garden 安装流程
3.1 添加官方软件源
sudo wget https://packages.osrfoundation.org/gazebo.gpg -O /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
3.2 执行安装命令
sudo apt update
sudo apt install -y gz-garden
3.3 环境验证
gz sim -v # 应显示版本信息
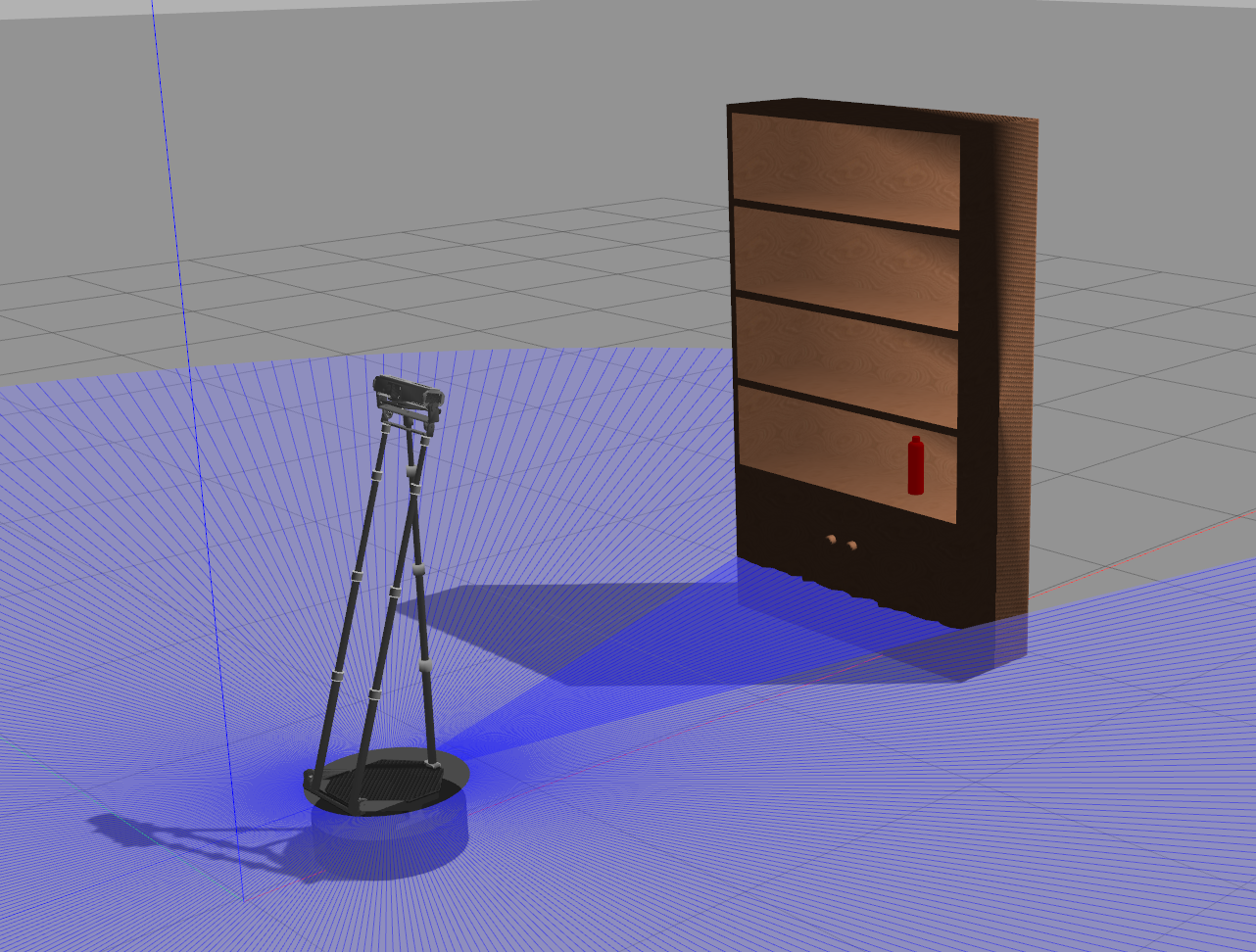
gz sim -v 4 # 启动带图形界面的仿真环境
四、Gazebo Classic 安装方法
4.1 添加软件仓库
sudo apt install -y wget
wget https://packages.osrfoundation.org/gazebo.gpg -O /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
4.2 安装核心组件
sudo apt update
sudo apt install -y gazebo11 libgazebo11-dev
4.3 验证安装
gazebo --version # 应显示11.x.x版本号
gzserver --version # 服务器版本验证
五、基础使用教程
5.1 Gazebo Garden 操作
- 启动图形界面:
gz sim - 加载示例世界:
gz sim -v 4 -r visualize_lidar.sdf - 常用快捷键:
WASD:视角移动鼠标右键拖动:旋转视角空格键:重置视角
5.2 Gazebo Classic 操作
- 启动默认世界:
gazebo --verbose worlds/empty.world - 插入标准模型:
# 在GUI界面左侧面板选择模型库 Insert -> Model Database -> Sun Insert -> Model Database -> Ground Plane
六、常见问题排错指南
6.1 图形渲染异常
现象:黑屏或模型显示异常
解决方案:
sudo apt install -y mesa-utils
glxinfo | grep "OpenGL version" # 验证驱动安装
LIBGL_ALWAYS_SOFTWARE=1 gz sim # 强制软件渲染
6.2 物理引擎错误
现象:模型穿透或运动异常
解决方法:
- 检查物理引擎设置:
<physics type='ode'> <max_step_size>0.001</max_step_size> <real_time_factor>1</real_time_factor> </physics> - 更新ODE库:
sudo apt install --only-upgrade libode8
七、版本兼容性说明
| 功能模块 | Gazebo Classic | Gazebo Garden |
|---|---|---|
| ROS 1 支持 | 完全支持 | 不支持 |
| ROS 2 支持 | 部分支持 | 完全支持 |
| SDFormat | v6.2 | v1.7+ |
| 物理引擎 | ODE/Bullet | DART/TPE |
| 渲染系统 | OpenGL | Vulkan/OGRE2 |
八、进阶配置建议
8.1 多版本共存配置
# 创建别名区分版本
echo "alias gz-classic='gazebo'" >> ~/.bashrc
echo "alias gz-new='gz sim'" >> ~/.bashrc
source ~/.bashrc
8.2 GPU加速配置
对于NVIDIA显卡:
sudo apt install -y nvidia-driver-525 libnvidia-gl-525
nvidia-smi # 验证驱动状态
export __NV_PRIME_RENDER_OFFLOAD=1 # 启用Prime渲染
本教程遵循Gazebo官方文档编写,所有命令均在Ubuntu 22.04 LTS环境下验证通过。建议开发者根据项目需求选择合适版本,并定期关注官方仓库的版本更新公告。
参考文献
Gazebo Tutorials