一:GPIO
1.1 了解时钟树(必懂的硬件基础)
在 STM32 开发中,时钟系统是一切外设工作的 “心脏”。理解时钟树的工作原理,是正确配置 GPIO、UART 等外设的核心前提。
1.1.1 为什么必须开启外设时钟?
1. 计算机工作的时间基准
- 振荡周期:晶振(或内部 RC 振荡器)完成一次完整振荡的时间,是系统最基础的时间单位(如 8MHz 晶振的振荡周期为 125ns)。
- 机器周期:CPU 执行一个基本操作(如读取寄存器)所需的时间,通常由多个振荡周期组成。STM32 传统架构中,12 个振荡周期构成 1 个机器周期(与 51 单片机兼容)。
- 指令周期:执行一条指令的时间,可能包含 1~4 个机器周期(如简单赋值指令为 1 周期,乘法指令为 4 周期)。
2. 节能设计与按需开启
STM32 默认关闭未使用的外设时钟,避免资源浪费:
- 未开启时钟的外设(如 GPIOC)相当于 “断电”,所有寄存器操作无效。
- 时钟使能是外设初始化的第一步,必须优先执行。
1.1.2 时钟树核心概念与 STM32 架构
1. 时钟树
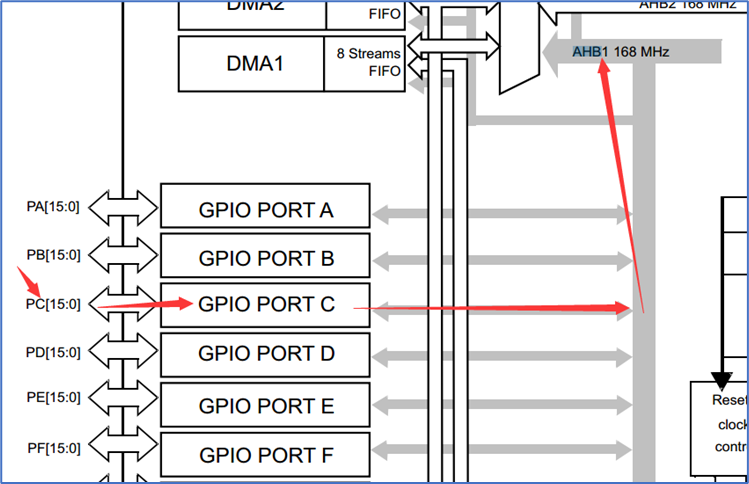
- 关键路径:GPIO 外设(如 GPIOC)挂载在 AHB1 总线上,需通过
RCC_AHB1PeriphClockCmd函数单独使能时钟。
1.1.3 168MHz 主频的时间参数计算
STM32F405 工作在 168MHz 主频,各时间参数计算如下:
步骤 1:计算振荡周期
- 主频 = 晶振频率 = 168MHz=168,000,000 次 / 秒
- 振荡周期 = 1 / 主频 = 1/(168×10⁶)≈5.952ns(纳秒,1ns=10⁻⁹秒)
步骤 2:推导机器周期(12 振荡周期为 1 机器周期)
- 机器周期 = 12× 振荡周期 = 12×5.952ns≈71.428ns
- 通俗理解:CPU 每 71.428 纳秒完成一次基本操作(如从 GPIO 寄存器读写数据)。
步骤 3:计算 1 微秒内的机器周期数
- 1μs=10⁻⁶秒 = 1,000,000ns
- 1μs 内机器周期数 = 1,000,000ns÷71.428ns≈14 个。
总结:时钟使能是外设驱动的第一步
掌握时钟树的工作原理,是 STM32 开发的核心基础:
- 三大周期:振荡周期(晶振频率)→ 机器周期(12 振荡周期)→ 指令周期(1~4 机器周期)。
- 使能函数:通过
RCC_AHB1PeriphClockCmd激活目标 GPIO 组的时钟(如 GPIOC)。 - 开发原则:先使能时钟,再配置外设,避免因 “时钟未开” 导致的隐形错误。
1.2 GPIO 之输出(点灯)
GPIO 的输出功能是 STM32 控制外部设备的基础,点亮 LED 是最经典的入门案例。本节以 PC4 连接的 LED 为例,详解输出模式配置、电平控制。
输出核心目标:通过引脚电平控制外设状态
GPIO 输出的本质是将 CPU 的逻辑信号(0/1)转换为引脚的高低电平,驱动外设(如 LED、继电器)工作。
关键步骤:分析硬件电路 → 选择输出模式 → 初始化配置 → 输出电平控制
1.2.1 第一步:原理图分析(确定 LED 连接与点亮条件)
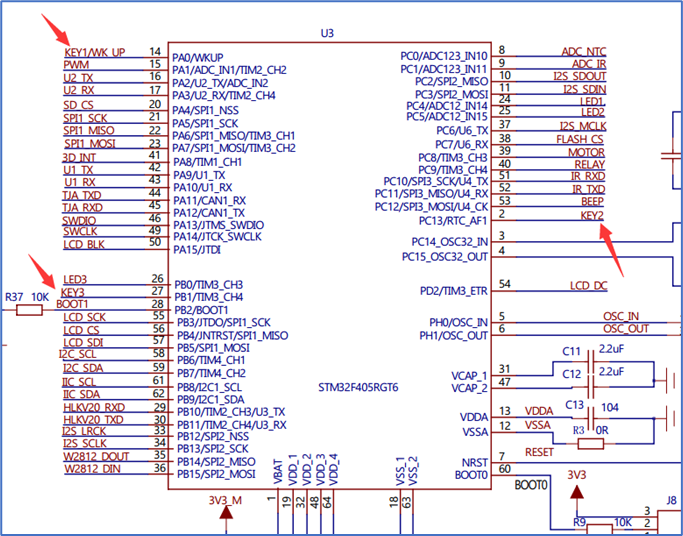
1. LED 硬件连接解析
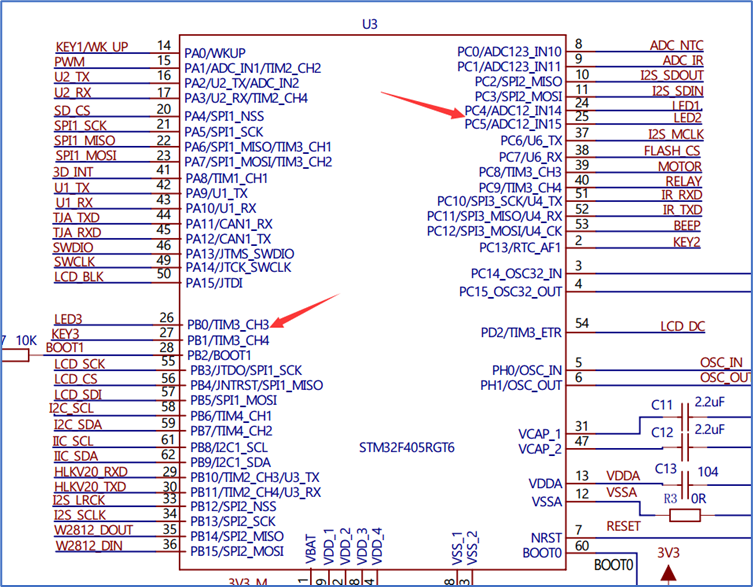
- IO 口分组:STM32F405 包含 GPIOA、GPIOB、GPIOC 等多组 IO,每组 16 个引脚(编号 0~15)。
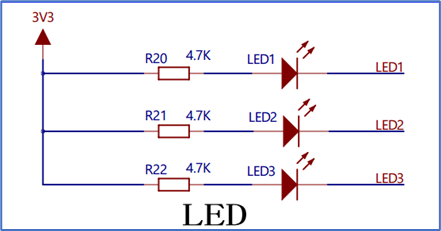
- LED 连接:
- LED1 连接 GPIOC 的 4 号引脚(PC4)
- LED2 连接 GPIOC 的 5 号引脚(PC5)
- LED3 连接 GPIOB 的 0 号引脚(PB0)
- 点亮条件:
- LED 阳极接 3.3V 电源,阴极通过 4.7kΩ 电阻连接 GPIO 引脚。
- 输出低电平(0V)时:LED 两端形成电压差,点亮;
- 输出高电平(3.3V)时:无电压差,LED 熄灭(低电平有效)。
1.2.2 第二步:如何输出低电平(输出模式选择)
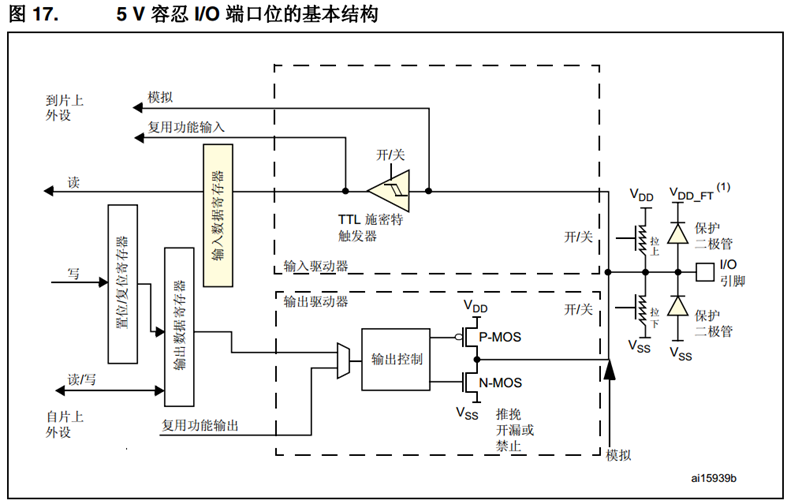
- 输入浮空:浮空输入状态下,IO的电平状态是不确定的,完全由外部输入决定,如果在该引脚悬空的情况下,读取该端口的电平是不确定的。做按键,是要读取电平状态,这种配置抗干扰性差,但是处理信号方面一般是配置这个功能。如测试一个波形,这时候可以配置这个功能。
- 输入上拉:经过电阻连接到VCC,能让IO口在没有连接信号时有一个确定的高电平,并且也能从VCC处获得比较大的驱动电流。
- 输入下拉:经过电阻连接到GND,能让IO口在没有连接信号时有一个确定的低电平。
- 模拟输入:芯片内部外设专用功能(ADC,DAC对应的IO口功能)
- 开漏输出:IO输出0接地,IO输出1悬空,需要外接上拉电阻,才能实现输出高电平。
- 推挽式输出:IO输出0接地,IO输出1接VCC,拥有较强的驱动能力。
- 推挽式复用功能:GPIO口被用作第二功能时的配置情况(即并非作为普通IO口使用),比如像片上外设的UART、SPI模块对应的输出数据线
- 开漏复用功能:GPIO口被用作第二功能时的配置情况(即并非作为普通IO口使用),比如像片上外设的IIC模块对应的数据线和时钟线,使用时要外接上拉电阻。
根据 STM32 数据手册,GPIO 可配置为 8 种模式,其中输出相关模式如下:
1. 输出模式对比(重点关注推挽与开漏)
| 模式类型 | 电路结构 | 电平特性 | 驱动能力 | 适用场景 | LED 控制选择原因 |
|---|---|---|---|---|---|
| 推挽输出 | 内部集成上拉 / 下拉 MOS 管 | 输出 0 接地,1 接 VCC(3.3V) | 强驱动 | 直接驱动 LED、电机等 | 无需外接电阻,直接输出有效电平 |
| 开漏输出 | 仅 N-MOS 管,需外接上拉电阻 | 输出 0 接地,1 悬空(需上拉) | 弱驱动 | I2C 总线、电平转换 | 不适用(LED 电路已固定电平) |
| 复用推挽 | 外设功能专用(如 UART) | 外设控制输出 | - | 串口、SPI 等外设通信 | 非普通 IO 输出场景 |
2. 选择推挽输出的原因
- LED 电路中,GPIO 引脚直接控制电平即可驱动,无需额外上拉 / 下拉电阻,推挽输出能提供足够电流(约 4mA),满足 LED 点亮需求。
1.2.3 第三步:模式设置(库函数配置推挽输出)
配置 GPIO 需使用GPIO_Init函数,其参数通过GPIO_InitTypeDef结构体传递,各成员作用如下:
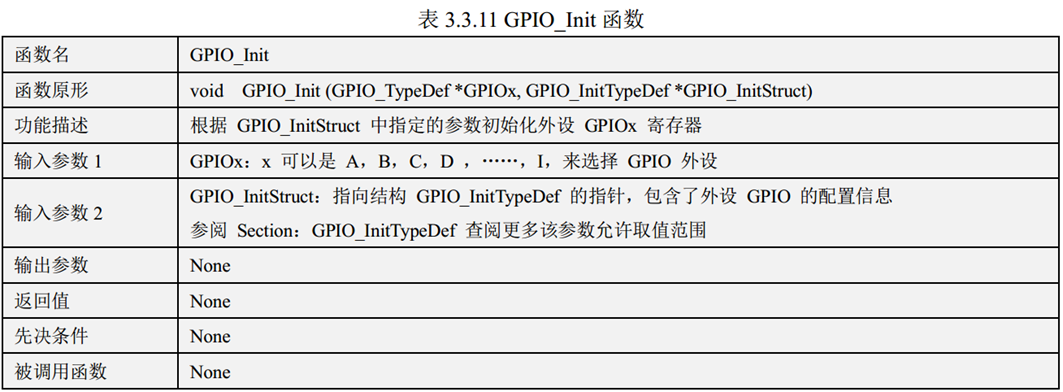
GPIO_InitTypeDef定义于文件“stm32f4xx_gpio.h”
1. 结构体成员详解
typedef struct {
uint32_t GPIO_Pin; // 目标引脚(如GPIO_Pin_4表示4号引脚)
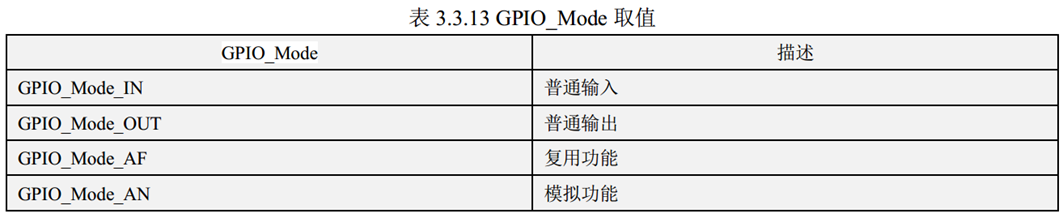
GPIOMode_TypeDef GPIO_Mode; // 模式(输出/输入/复用等)
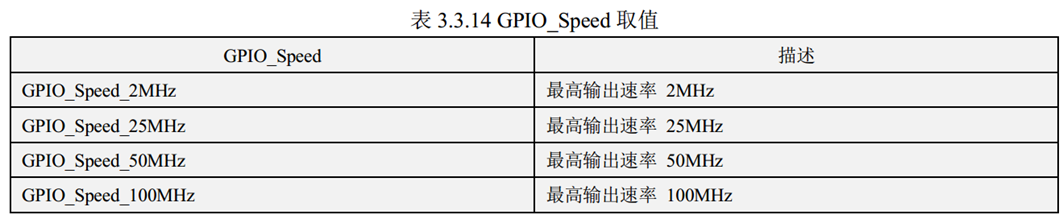
GPIOSpeed_TypeDef GPIO_Speed; // 输出速率(2MHz/25MHz等)
GPIOOType_TypeDef GPIO_OType; // 输出类型(推挽/开漏)
GPIOPuPd_TypeDef GPIO_PuPd; // 上下拉(无/上拉/下拉)
} GPIO_InitTypeDef;

2. 示例代码:初始化 PC4 为推挽输出
// 1. 定义初始化结构体
GPIO_InitTypeDef GPIO_InitStruct;
// 2. 使能GPIOC时钟(PC4属于GPIOC组)
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);
// 3. 配置结构体成员
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4; // 选择PC4引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; // 输出模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; // 推挽输出(关键配置)
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz; // 输出速率(2MHz足够驱动LED)
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; // 无上下拉(电路已固定电平)
// 4. 应用配置到GPIOC
GPIO_Init(GPIOC, &GPIO_InitStruct);1.2.4 第四步:时钟使能(外设工作的前提)
在STM32 中,由于功能太多,所以不可能都处于开启状态,就把功能都设默认关闭未使用,我们需要使用到什么外设就开启什么的外设时钟,根据手册可以看到PC口是挂在AHB1上的,所以需手动开启目标 GPIO 组时钟:
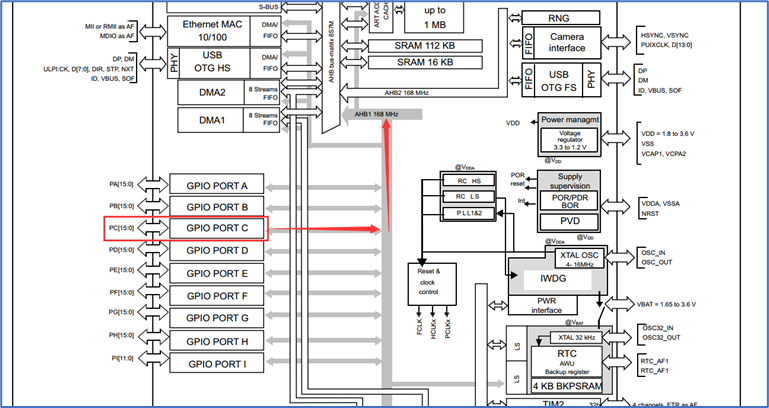
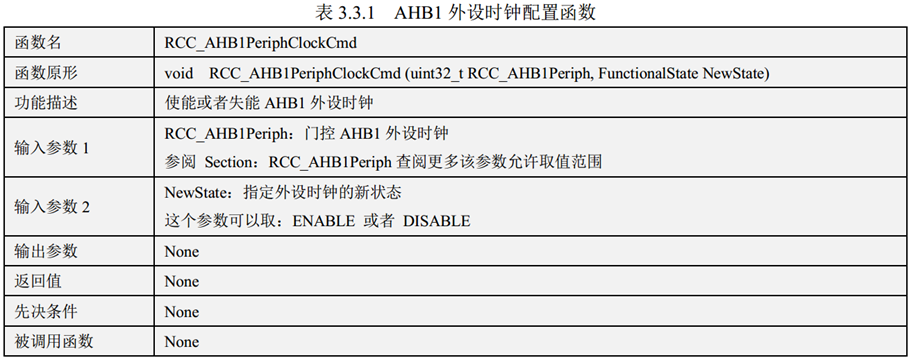
- 时钟挂接:GPIOC 时钟属于 AHB1 总线,需通过
RCC_AHB1PeriphClockCmd函数激活。 - 代码实现:
// 开启GPIOC时钟(PC4/5所在组) RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE); // 若控制PB0(GPIOB组),需额外开启GPIOB时钟 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); - 参数解释:
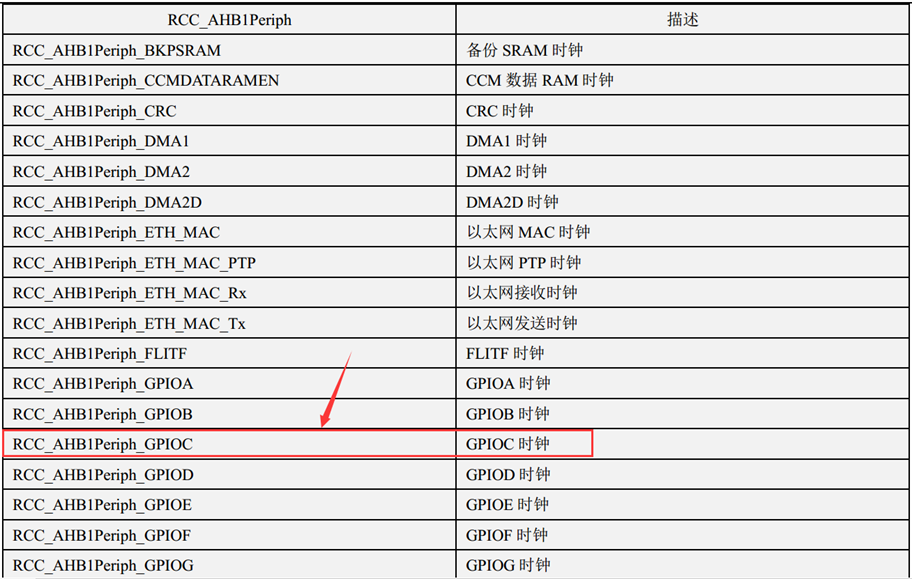
RCC_AHB1Periph_GPIOC:指定操作对象为 GPIOC 组时钟;ENABLE:激活时钟(若设为DISABLE则关闭)。
1.2.5 第五步:高低电平输出(控制 LED 亮灭)
配置完成后,通过以下两个函数实现电平控制:
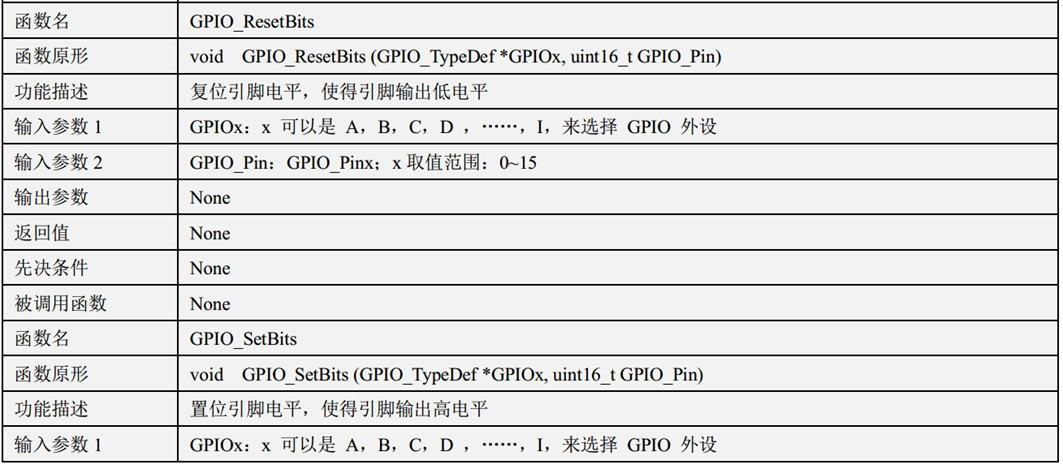
1. 函数功能详解
| 函数名 | 功能描述 | 等价寄存器操作 | LED 控制效果 | |
|---|---|---|---|---|
GPIO_ResetBits | 输出低电平(复位引脚) | GPIOx->ODR &= ~(1<<Pin) | 点亮 LED(低电平有效) | |
GPIO_SetBits | 输出高电平(置位引脚) | GPIOx->ODR |= (1<<Pin) | 熄灭 LED(高电平无效) |
2. 代码示例(以 PC4 为例)
// 点亮LED(PC4输出低电平)
GPIO_ResetBits(GPIOC, GPIO_Pin_4);
// 熄灭LED(PC4输出高电平)
GPIO_SetBits(GPIOC, GPIO_Pin_4);
// 同时控制多个LED(如PC4和PC5)
GPIO_ResetBits(GPIOC, GPIO_Pin_4 | GPIO_Pin_5); // 点亮LED1和LED2
3. 底层原理
- 数据存储在 GPIO 输出数据寄存器(
GPIOx->ODR),每个位对应一个引脚的电平(0 = 低,1 = 高)。 GPIO_ResetBits/GPIO_SetBits本质是对ODR寄存器的对应位进行写 0 或写 1 操作。
总结:GPIO 输出五步走
- 原理图分析:确定 LED 连接的引脚(如 PC4)和有效电平(低电平点亮)。
- 模式选择:根据电路选择推挽输出(强驱动,直接控制电平)。
- 初始化配置:使用
GPIO_Init函数配置引脚模式、速率和输出类型。 - 时钟使能:通过
RCC_AHB1PeriphClockCmd激活目标 GPIO 组时钟。 - 电平控制:用
GPIO_ResetBits/GPIO_SetBits实现高低电平输出。
通过以上步骤,可快速实现 LED 点亮,并为后续控制继电器、蜂鸣器等外设打下基础。关键点在于理解推挽输出的特性和时钟使能的必要性,避免因配置错误导致外设无响应。
1.3 GPIO 之输入(从引脚信号到数据读取全解析)
GPIO 的输入功能是 STM32 获取外部设备状态的核心途径。通过配置输入模式并读取寄存器数据,可实现按键检测、传感器信号采集等功能。
输入核心逻辑:从引脚信号到寄存器数据
输入的本质是将外部高低电平信号存入 GPIO 输入数据寄存器(IDR),CPU 通过读取 IDR 获取引脚状态。
关键步骤:配置输入模式 → 使能时钟 → 读取寄存器 → 判断信号状态
1.3.1 第一步:原理图分析(确定硬件连接与信号逻辑)
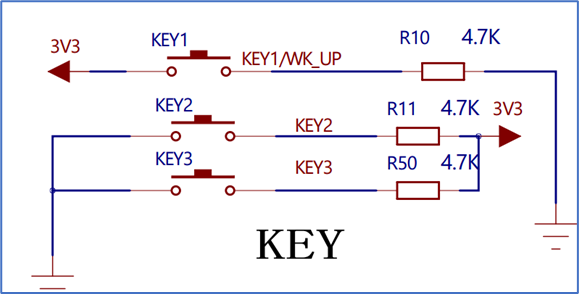
1. 按键电路关键信息
- 引脚连接:按键 1 一端接 3.3V,另一端接 PA0 引脚,同时通过 10kΩ 下拉电阻接地(原理图中提到 “连接在 PA0、PC13、PB1 上,并且接有上拉或下拉电阻”)。
- 电平逻辑:
- 按键未按下:PA0 通过下拉电阻接地,输入低电平(0)。
- 按键按下:PA0 连接 3.3V,输入高电平(1)。
2. 目标功能构建
通过检测 PA0 电平变化,控制 PC4 连接的 LED:
- 按键按下(PA0=1)→ PC4 输出低电平(0)→ LED 点亮
- 按键松开(PA0=0)→ PC4 输出高电平(1)→ LED 熄灭
1.3.2 第二步:输入模式选择(四大模式对比与场景匹配)
1. 四种输入模式详解(课件核心知识点)
| 模式类型 | 内部结构 | 无信号时电平 | 抗干扰性 | 典型应用场景 | 课件中的关键描述 |
|---|---|---|---|---|---|
| 输入浮空 | 无上下拉电阻 | 不确定 | 差 | 外部已完整上拉 / 下拉电路 | “抗干扰性差,处理信号时配置” |
| 输入上拉 | 内部上拉电阻(接 VCC) | 高电平 | 强 | 按键一端接地的电路 | “获得较大驱动电流” |
| 输入下拉 | 内部下拉电阻(接 GND) | 低电平 | 强 | 按键一端接电源的电路 | “没有连接信号时有确定低电平” |
| 模拟输入 | 禁用数字电路 | - | - | ADC/DAC 专用引脚 | “芯片内部外设专用功能” |
2. 本例选择:输入下拉模式
- 选择依据:硬件电路中按键未按下时,PA0 通过下拉电阻接地(低电平),与输入下拉模式(默认低电平)完全匹配。
- 优势:无需额外外部电阻,利用内部下拉电阻即可稳定初始状态,简化电路设计。
1.3.3 第三步:输入模式配置(库函数分步实现)
1. 初始化 GPIO 输入结构体(关键配置)
GPIO_InitTypeDef GPIO_InitStruct; // 定义初始化结构体
// 配置PA0为输入下拉模式
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; // 选择PA0引脚(0号引脚)
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN; // 输入模式
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_DOWN; // 下拉模式(重点:使能内部下拉电阻)
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; // 输入速度(高速响应按键信号变化)
// 应用配置到GPIOA组
GPIO_Init(GPIOA, &GPIO_InitStruct);
- 参数解释:
GPIO_PuPd_DOWN:启用内部下拉电阻,确保未按键时 PA0 为低电平。GPIO_Speed_50MHz:输入速度需高于按键信号变化频率(50MHz 足够捕捉 20ms 级抖动)。
2. 配置前后的引脚状态对比
| 配置项 | 未配置时(默认) | 配置后(按键未按下) |
|---|---|---|
| 上下拉状态 | 浮空(电平不确定) | 下拉(低电平 0) |
| 输入寄存器 IDR | 随机值(不可靠) | 0(PA0 对应位为 0) |
| 信号稳定性 | 易受干扰 | 强抗干扰(下拉电阻稳定电平) |
1.3.4 第四步:开启时钟(输入功能生效的前提)
1. 时钟使能必要性
STM32 默认关闭未使用的外设时钟,PA0 属于 GPIOA 组,需单独开启时钟:
// 使能GPIOA组时钟(必做第一步)
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
- 函数参数:
RCC_AHB1Periph_GPIOA:指定操作对象为 GPIOA 组时钟)。ENABLE:激活时钟,使 PA0 引脚开始响应外部信号(若未开启,所有输入操作无效)。
2. 时钟未开启的后果
- 现象:无论按键是否按下,PA0 的输入数据始终为随机值或固定值(如 0)。
- 原因:未开启时钟的 GPIO 组处于断电状态,无法接收外部信号。
1.3.5 第五步:判断按键是否按下(读取输入数据寄存器)
1. 直接读取输入数据寄存器(IDR)
// 读取PA0当前电平(1=按下,0=未按下)
uint8_t key_state = GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0);
// 判断按键状态
if (key_state == 1) {
// 按键按下:点亮LED(PC4输出低电平)
GPIO_ResetBits(GPIOC, GPIO_Pin_4);
} else {
// 按键松开:熄灭LED(PC4输出高电平)
GPIO_SetBits(GPIOC, GPIO_Pin_4);
}
- 函数解析:
GPIO_ReadInputDataBit:专门用于读取单个引脚的输入电平,返回值与 IDR 寄存器对应位一致。- 操作逻辑:通过检测 PA0 电平变化,间接判断按键是否按下,进而控制 PC4 输出状态。
2. 底层寄存器操作(可选:理解原理)
// 等价于GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0)
uint8_t key_state = (GPIOA->IDR & GPIO_Pin_0) ? 1 : 0;
GPIOA->IDR:输入数据寄存器,每一位对应一个引脚的当前电平(0 或 1)。
总结:输入功能实现五步法
- 原理图分析:确定引脚连接与电平逻辑(如 PA0 接按键,下拉电阻接地)。
- 模式选择:根据硬件设计选择输入下拉模式(确保未按键时电平稳定为 0)。
- 初始化配置:通过
GPIO_Init函数配置引脚为输入下拉,设置合适的输入速度。 - 时钟使能:使用
RCC_AHB1PeriphClockCmd激活目标 GPIO 组时钟(PA0 对应 GPIOA)。 - 电平检测:通过
GPIO_ReadInputDataBit读取 IDR 寄存器,判断按键状态并控制外设。
掌握 GPIO 输入功能后,可进一步结合输出功能实现交互式控制(如按键调节 LED 亮度),或扩展至多按键检测场景。
第二章 模块化编程(代码工程化的核心技能)
在嵌入式开发中,模块化编程是提升代码质量的关键手段。通过将功能封装为独立模块,可实现代码复用、简化维护,并为大型项目奠定架构基础。本章以 LED 驱动模块为例,详解模块化编程的实现步骤与最佳实践。
2.1 什么是模块化编程?(核心概念解析)
1. 模块化定义
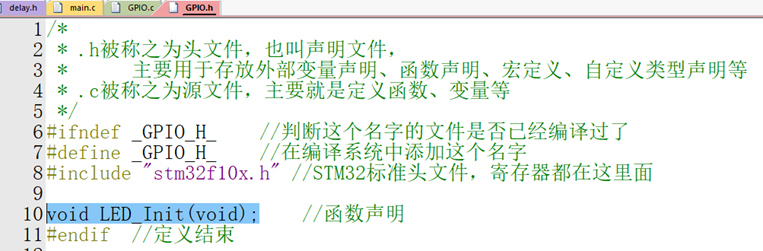
将功能相关的代码(如 LED 控制、按键检测)封装在独立的文件中,形成可复用的 “模块”,通常由一个头文件(.h)和一个源文件(.c)组成:
- 头文件(
.h):声明模块接口(函数、宏定义、结构体),供外部调用。 - 源文件(
.c):实现模块具体功能(如 GPIO 初始化、电平控制)。
2. 核心优势
| 优势 | 具体体现 | 项目价值 |
|---|---|---|
| 代码复用 | 无需重复编写 LED 驱动 | 缩短开发周期 30%+ |
| 维护方便 | 修改 LED 引脚只需更新模块文件 | 降低后期维护成本 |
| 结构清晰 | 主程序仅调用模块接口 | 提升团队协作效率 |
| 移植性强 | 模块可直接用于不同项目 | 适应多平台开发需求 |
2.2 模块化编程五步实战(以 LED 模块为例)
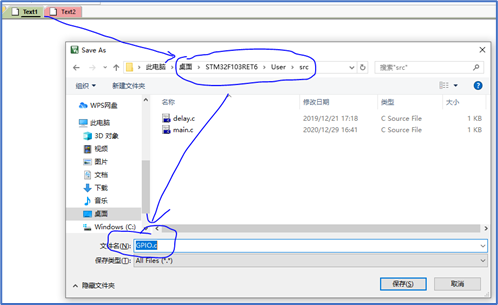
2.2.1 第一步:创建模块文件(工程结构搭建)
1. 文件创建规范
- 在工程目录下新建两个文件:
led.c:存放 LED 驱动实现代码(源文件)led.h:存放 LED 驱动接口声明(头文件)

2. Keil 工程添加文件
- 在 Keil 项目中右键点击 “Source Group” → “Add Existing Files”,将
led.c加入工程。 - 头文件
led.h无需手动添加,但需确保编译时能找到路径(通过Options for Target→C/C++→Include Paths添加头文件目录)。
2.2.2 第二步:编写头文件(.h:模块接口声明)
1. 头文件基本结构
#ifndef __LED_H__ // 防止重复包含(必须!)
#define __LED_H__ // 定义模块唯一标识
#include "stm32f4xx.h" // 包含STM32标准头文件
// 模块配置宏(可根据硬件修改)
#define LED1_PIN GPIO_Pin_4 // LED1连接PC4
#define LED1_PORT GPIOC // PC4属于GPIOC组
// 函数声明(模块对外接口)
void LED_Init(void); // LED初始化函数
void LED_On(void); // 点亮LED
void LED_Off(void); // 熄灭LED
void LED_Toggle(void); // 翻转LED状态
#endif // 头文件结束标志
2. 关键语法解释
- 防止重复包含:
#ifndef __LED_H__与#define __LED_H__组合使用,避免多次包含头文件导致编译错误。 - 模块配置宏:通过宏定义引脚和端口,方便后期修改(如更换 LED 连接引脚时只需修改宏定义)。
2.2.3 第三步:实现源文件(.c:模块功能定义)
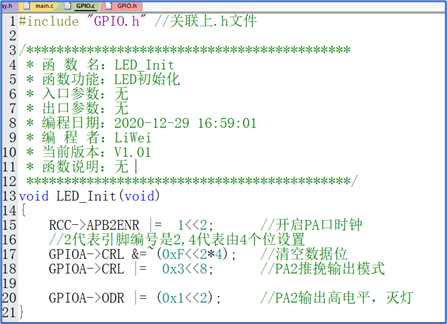
1. 包含头文件与模块依赖
#include "led.h" // 包含当前模块头文件(必须)
#include "delay.h" // 若使用延时函数,需包含对应头文件
2. LED 初始化函数实现(核心代码)
void LED_Init(void) {
// 1. 使能GPIOC时钟(LED1连接PC4,属于GPIOC组)
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);
// 2. 配置GPIO初始化结构体
GPIO_InitTypeDef GPIO_InitStruct = {
.GPIO_Pin = LED1_PIN, // 使用LED1_PIN宏(PC4)
.GPIO_Mode = GPIO_Mode_OUT, // 输出模式
.GPIO_OType = GPIO_OType_PP, // 推挽输出(LED电路适用)
.GPIO_Speed = GPIO_Speed_2MHz, // 输出速率(2MHz足够驱动LED)
.GPIO_PuPd = GPIO_PuPd_NOPULL // 无上下拉(电路已固定电平)
};
// 3. 应用配置到GPIOC
GPIO_Init(LED1_PORT, &GPIO_InitStruct);
// 4. 初始状态:LED熄灭(高电平)
LED_Off();
}
3. 电平控制函数实现
void LED_On(void) {
GPIO_ResetBits(LED1_PORT, LED1_PIN); // 输出低电平,点亮LED(低电平有效)
}
void LED_Off(void) {
GPIO_SetBits(LED1_PORT, LED1_PIN); // 输出高电平,熄灭LED
}
void LED_Toggle(void) {
LED1_PORT->ODR ^= LED1_PIN; // 翻转电平(等价于异或操作)
}
4. 代码规范建议
- 注释清晰:关键步骤添加注释(如时钟使能、模式配置),方便后期维护。
- 使用宏定义:通过
LED1_PIN和LED1_PORT宏,提高代码可读性和可移植性。
2.2.4 第四步:主程序调用模块(.c:集成与测试)
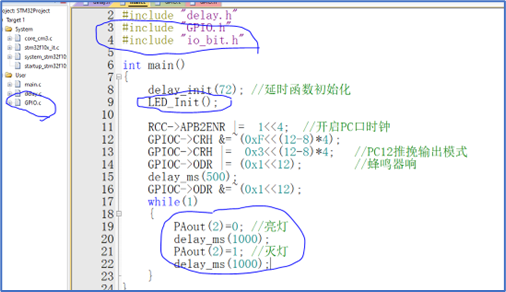
1. 包含模块头文件
#include "led.h" // 包含LED模块头文件
#include "key.h" // 若有按键模块,同时包含(假设已实现)
2. 初始化模块
int main(void) {
LED_Init(); // 初始化LED模块
// 其他模块初始化(如按键、串口)...
while (1) {
LED_On(); // 调用模块函数点亮LED
delay_ms(500); // 延时500ms(假设delay模块已实现)
LED_Off(); // 调用模块函数熄灭LED
delay_ms(500);
}
}
3. 编译与调试
- 常见错误:
- 头文件路径错误:确保
led.h所在目录已添加到编译器包含路径。 - 函数未声明:检查头文件是否正确声明函数(如
void LED_Init(void);)。
- 头文件路径错误:确保
2.2.5 第五步:模块扩展(多 LED 控制)
若需控制多个 LED(如 LED2 连接 PC5,LED3 连接 PB0),只需:
- 在
led.h中添加新宏定义:#define LED2_PIN GPIO_Pin_5 #define LED2_PORT GPIOC #define LED3_PIN GPIO_Pin_0 #define LED3_PORT GPIOB - 在
led.c中扩展初始化函数,支持多引脚配置:void LED_Init(void) { // 使能GPIOC和GPIOB时钟(LED2在GPIOC,LED3在GPIOB) RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC | RCC_AHB1Periph_GPIOB, ENABLE); // 配置PC4、PC5、PB0为推挽输出(使用|操作符选择多个引脚) GPIO_InitTypeDef GPIO_InitStruct = { .GPIO_Pin = LED1_PIN | LED2_PIN | LED3_PIN, .GPIO_Mode = GPIO_Mode_OUT, .GPIO_OType = GPIO_OType_PP, .GPIO_Speed = GPIO_Speed_2MHz, .GPIO_PuPd = GPIO_PuPd_NOPULL }; GPIO_Init(LED1_PORT, &GPIO_InitStruct); // GPIOC和GPIOB需分别初始化 GPIO_Init(LED3_PORT, &GPIO_InitStruct); // 注意:PB0属于GPIOB,需单独初始化 LED_Off(); // 初始全部熄灭 }
2.3 模块化编程最佳实践(进阶技巧)
1. 头文件设计原则
- 接口简洁:仅暴露必要的函数和宏,隐藏内部实现细节(如
GPIO_Init具体配置不对外公开)。 - 兼容性:通过条件编译支持不同 STM32 型号(如 F405/F411):
#if defined(STM32F405) #define LED_PORT GPIOC #elif defined(STM32F411) #define LED_PORT GPIOD #endif
2. 模块依赖管理
- 分层结构:底层模块(如
delay.c)不依赖上层模块,避免循环依赖。 - 初始化顺序:外设模块(如 LED)需在主程序中先于功能模块(如按键控制 LED)初始化。
3. 代码复用技巧
- 跨项目复用:将成熟模块(如
led.c/h)直接复制到新工程,仅修改引脚宏定义即可使用。 - 版本控制:在模块文件头部添加版本信息和作者注释,方便追溯修改历史:
/************************** * 模块名称:LED驱动模块 * 版本:V1.0 * 作者:XXX * 日期:2023-10-01 **************************/
2.4 常见问题与解决方案(避坑指南)
| 问题现象 | 可能原因 | 解决方法 |
|---|---|---|
| 模块函数无法调用 | 头文件未正确声明函数 | 检查.h文件是否包含函数声明 |
| 编译报错 “重复定义” | 头文件未使用防重复包含宏 | 添加#ifndef __XXX_H__保护宏 |
| 模块功能异常 | 时钟使能遗漏或错误 | 检查.c文件中是否正确使能目标 GPIO 时钟 |
| 头文件路径错误 | Keil 未添加头文件目录 | 在Options for Target中添加inc目录 |
总结:模块化编程的核心价值
通过本章学习,你已掌握:
- 模块结构:头文件声明接口,源文件实现功能,形成独立可复用单元。
- 实现步骤:创建文件→编写头文件→实现功能→调用测试→扩展功能。
- 最佳实践:使用宏定义提高可移植性,添加注释和版本信息,避免编译错误。
模块化编程是嵌入式开发的必备技能,后续学习 UART、SPI 等复杂外设时,可沿用此架构快速构建项目。下一章将深入讲解位带操作,实现更高效的单比特控制,进一步提升代码效率。
第三章 位带操作(单比特高效控制的终极方案)
在 STM32 开发中,位带操作是实现单比特直接控制的核心技术,能大幅简化 GPIO 读写代码,提升开发效率。本章从原理到实战,详解位带操作的实现方法与应用场景,帮助开发者掌握这一高效技能。
3.1 为什么需要位带操作?(痛点解析)
1. 传统 GPIO 操作的局限
- 寄存器操作:需通过
GPIO_SetBits/GPIO_ResetBits函数或直接操作ODR寄存器,每次操作需指定端口和引脚,代码冗余。 - 多比特影响:操作寄存器时可能意外影响其他位(如
GPIOC->ODR |= 0x10需确保其他位不受影响)。
2. 位带操作的核心价值
- 单比特独立操作:直接对 GPIO 的某一位进行读写,无需关心其他位状态。
- 代码简化:实现类似 51 单片机
P1.0 = 0的简洁语法,提升可读性。 - 效率提升:通过映射地址直接操作,减少寄存器整体读写开销。
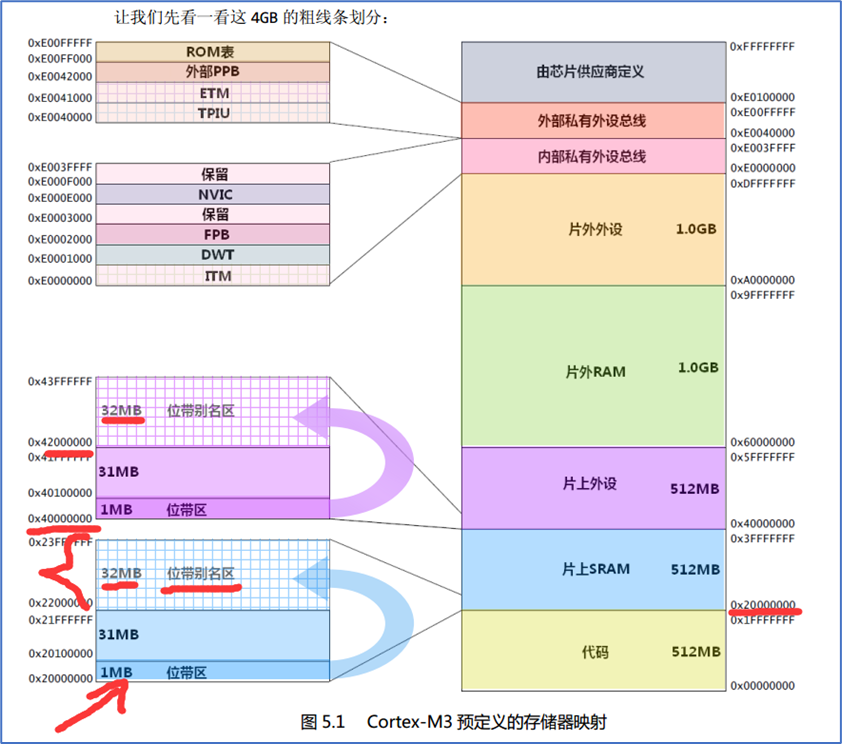
3.2 位带操作核心原理(从存储器映射说起)
1. 位带区与别名区(Memory Bit-Banding)
STM32 在存储器中划分两个位带区,将每个比特映射到一个 32 位的别名地址:
- 位带区(Bit-Band Region):
- SRAM 位带区:地址范围
0x20000000~0x200FFFFF(1MB) - 外设位带区:地址范围
0x40000000~0x400FFFFF(1MB)
- SRAM 位带区:地址范围
- 别名区(Alias Region):
- 每个位带区的 1 位映射到别名区的 1 个字(32 位),形成 32MB 的别名空间。
- 操作别名区的一个字,等价于对原地址的对应位进行读 - 改 - 写操作。
2. 映射地址计算(关键公式拆解)
课件中给出的映射公式:
#define BITBAND(addr, bitnum) ((addr & 0xF0000000) + 0x2000000 + ((addr & 0xFFFFF) << 5) + (bitnum << 2))
公式拆解(以 PC4 为例):
(addr & 0xF0000000):提取原地址的最高 8 位(区分 SRAM / 外设区)。+ 0x2000000:外设位带别名区基址(SRAM 区为0x22000000,此处以外设为例)。((addr & 0xFFFFF) << 5):原地址相对于外设基址(0x40000000)的偏移,左移 5 位(每个寄存器 32 位,即 ×32)。(bitnum << 2):目标位的偏移(每个位占 4 字节,即 ×4)。
示例:PC4 的ODR寄存器地址为0x40020814(GPIOC 基址 0x40020800 + ODR 偏移 0x14),计算其别名地址:
BITBAND(0x40020814, 4) = 0x420102D0 // 最终别名地址(用于直接操作PC4)
3.3 位带操作封装(io_bit.h 头文件解析)
课件中提到将位带操作封装在io_bit.h中,以下是核心代码解析与使用方法:
1. 关键宏定义
// 位带操作核心宏
#define BITBAND(addr, bitnum) ((addr & 0xF0000000) + 0x2000000 + ((addr & 0xFFFFF) << 5) + (bitnum << 2))
#define MEM_ADDR(addr) (*(volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
// GPIO输出寄存器地址映射(以GPIOC为例)
#define GPIOC_ODR_Addr (GPIOC_BASE + 20) // ODR寄存器地址=GPIOC基址+0x14(0x20为课件笔误,实际偏移为0x14)
2. 自定义 IO 操作宏(简化调用)
在io_bit.h或自定义头文件中添加:
// 定义LED1(PC4)的位带操作宏
#define PC4_OUT BIT_ADDR(GPIOC_ODR_Addr, 4) // 输出位(控制LED亮灭)
#define PA0_IN BIT_ADDR(GPIOA_IDR_Addr, 0) // 输入位(检测按键状态)
3. 头文件使用步骤
- 将
io_bit.h放入工程的inc目录。 - 在需要位带操作的文件中包含:
#include "io_bit.h" // 包含位带操作头文件
3.4 位带操作实战(从 LED 控制到按键检测)
3.4.1 案例 1:位带操作点亮 LED(PC4)
步骤 1:使能 GPIOC 时钟(与传统方法一致)
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE); // 必须先开时钟
步骤 2:配置 PC4 为推挽输出(传统初始化步骤)
GPIO_InitTypeDef GPIO_InitStruct = {
.GPIO_Pin = GPIO_Pin_4,
.GPIO_Mode = GPIO_Mode_OUT,
.GPIO_OType = GPIO_OType_PP,
.GPIO_Speed = GPIO_Speed_2MHz,
.GPIO_PuPd = GPIO_PuPd_NOPULL
};
GPIO_Init(GPIOC, &GPIO_InitStruct);
步骤 3:位带操作控制电平
PC4_OUT = 0; // 点亮LED(输出低电平,等价于GPIO_ResetBits(GPIOC, GPIO_Pin_4))
PC4_OUT = 1; // 熄灭LED(输出高电平,等价于GPIO_SetBits(GPIOC, GPIO_Pin_4))
PC4_OUT ^= 1; // 翻转LED状态(异或操作,比寄存器操作更简洁)
3.4.2 案例 2:位带操作检测按键(PA0)
步骤 1:配置 PA0 为输入下拉模式(传统初始化)
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct = {
.GPIO_Pin = GPIO_Pin_0,
.GPIO_Mode = GPIO_Mode_IN,
.GPIO_PuPd = GPIO_PuPd_DOWN
};
GPIO_Init(GPIOA, &GPIO_InitStruct);
步骤 2:位带操作读取电平
if (PA0_IN == 1) { // 检测PA0高电平(按键按下)
PC4_OUT = 0; // 点亮LED
} else {
PC4_OUT = 1; // 熄灭LED
}
3.4.3 位带操作 vs 传统方法对比
| 操作类型 | 传统方法 | 位带操作 | 优势分析 |
|---|---|---|---|
| 点亮 LED | GPIO_ResetBits(GPIOC, GPIO_Pin_4) | PC4_OUT = 0; | 代码简洁,直接操作目标位 |
| 检测按键状态 | GPIO_ReadInputDataBit(GPIOA, 0) | if (PA0_IN == 1) | 省去引脚参数,可读性强 |
| 翻转电平 | GPIOC->ODR ^= GPIO_Pin_4 | PC4_OUT ^= 1; | 无需关心其他位状态 |
3.5 位带操作高级技巧(拓展应用)
1. 多引脚批量操作(位带区特性)
位带操作支持同时操作多个位(通过位带别名地址的字操作):
// 同时点亮PC4和PC5(假设已定义PC5_OUT宏)
*(volatile uint32_t*)BITBAND(GPIOC_ODR_Addr, 4) = 0; // 单独操作PC4
*(volatile uint32_t*)BITBAND(GPIOC_ODR_Addr, 5) = 0; // 单独操作PC5
2. 位带操作在中断中的应用
在中断服务函数中快速响应引脚状态变化:
void EXTI0_IRQHandler(void) {
if (PA0_IN == 1) { // 位带操作检测PA0电平
PC4_OUT ^= 1; // 中断中翻转LED状态(高效简洁)
}
EXTI_ClearITPendingBit(EXTI_Line0);
}
3. 注意事项
- 时钟使能:位带操作依赖目标 GPIO 的时钟已开启,否则操作无效(与传统方法一致)。
- 寄存器类型:仅支持
ODR(输出数据寄存器)和IDR(输入数据寄存器),不可直接操作控制寄存器(如MODER)。
3.6 常见错误与解决方案(避坑指南)
| 问题现象 | 可能原因 | 解决方法 |
|---|---|---|
| 位带操作无效 | 未使能目标 GPIO 时钟 | 添加RCC_AHB1PeriphClockCmd(..., ENABLE) |
| 地址计算错误 | 寄存器偏移量错误 | 查阅数据手册确认 ODR/IDR 偏移(ODR 为 0x14,IDR 为 0x10) |
| 宏定义错误 | BITBAND公式参数错误 | 检查addr是否为寄存器绝对地址,bitnum是否正确(0~15) |
| 编译报错 | 未包含io_bit.h头文件 | 确认头文件路径正确,添加包含语句 |
总结:位带操作的核心价值
通过本章学习,你已掌握:
- 原理:位带区将寄存器的每个位映射到别名地址,实现单比特独立操作。
- 封装:利用
io_bit.h中的宏定义,简化 GPIO 读写代码。 - 实战:通过位带操作实现 LED 控制、按键检测,代码更简洁高效。
- 拓展:支持多引脚操作和中断中的快速响应,提升系统实时性。
位带操作是 STM32 开发的进阶技巧,尤其适合需要频繁位操作的场景(如状态标志位处理、硬件信号快速响应)。结合前两章的 GPIO 基础与模块化编程,可构建高效稳定的嵌入式系统。后续学习中,可尝试将位带操作应用于 UART 奇偶校验位处理、SPI 状态位检测等场景,进一步发挥其优势。