以下是关于汽车辅助驾驶不同等级、技术对比、传感器差异及未来发展方向的详细分析:
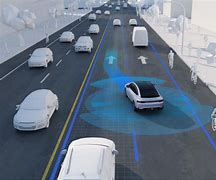
一、汽车辅助驾驶等级详解
根据SAE(国际自动机工程师学会)的标准,自动驾驶分为 L0到L5 六个等级:
1. L0(无自动化)
- 功能:完全由人类驾驶,无自动化辅助。
- 技术:无传感器或控制系统的介入。
- 示例:传统燃油车,仅提供基础警示(如胎压监测)。
2. L1(驾驶辅助)
- 功能:单一功能自动化,人类仍需主动控制车辆。
- 关键技术:
- 自适应巡航控制(ACC):自动调节车速与前车保持距离。
- 紧急制动辅助(AEB):检测碰撞风险并自动刹车。
- 传感器:雷达(毫米波/超声波)、摄像头。
- 示例:特斯拉Autopilot早期版本。
3. L2(部分自动化)
- 功能:同时控制加减速和转向,但需人类持续监控。
- 关键技术:
- 车道保持辅助(LKA):自动修正方向。
- 自适应巡航+车道居中(ALC):组合功能实现半自动驾驶。
- 传感器:多摄像头、毫米波雷达、超声波雷达。
- 示例:小鹏NGP、蔚来NOP。
4. L3(有条件自动化)
- 功能:在特定场景下完全接管驾驶,但需人类随时接管。
- 关键技术:
- 交通拥堵辅助(TJA):低速自动驾驶(如堵车时自动跟车)。
- 自动变道与超车:依赖高精度地图和环境感知。
- 传感器:激光雷达、高精度地图、多模态融合系统。
- 示例:奥迪A8(部分功能受限于法规未全面启用)。
5. L4(高度自动化)
- 功能:在限定区域(如高速公路、城市特定区域)完全自动驾驶,无需人类干预。
- 关键技术:
- 端到端自动驾驶:AI模型直接从传感器数据生成控制指令。
- V2X(车路协同):与交通设施实时通信。
- 传感器:激光雷达、毫米波雷达、摄像头、高精度GPS。
- 示例:Waymo在旧金山的Robotaxi测试。
6. L5(完全自动化)
- 功能:全场景、全路况完全自动驾驶,无地理限制。
- 关键技术:
- 超强AI决策系统:处理极端、罕见场景。
- 红外/热成像传感器:应对极端天气。
- 传感器:全模态传感器融合(激光雷达+摄像头+雷达+V2X)。
- 现状:仍处于研发阶段,需突破技术与法规瓶颈。
二、不同等级的功能对比
| 等级 | L0 | L1 | L2 | L3 | L4 | L5 |
|---|---|---|---|---|---|---|
| 控制权 | 人类完全控制 | 单一功能辅助 | 多功能协同,人类需监控 | 系统控制,需人类接管 | 系统完全控制 | 系统完全控制 |
| 应用场景 | 无 | 高速巡航、泊车 | 高速车道保持、自适应巡航 | 堵车自动驾驶(需人类待命) | 高速/城市限定区域 | 全场景、全路况 |
| 技术依赖 | 无 | 单一传感器(雷达) | 多传感器融合(摄像头+雷达) | 激光雷达+高精度地图 | 多模态传感器+V2X | 全场景传感器+AI |
三、辅助驾驶技术演进
过去(2010年前)
- 技术基础:
- 单一功能(如ACC、AEB)。
- 依赖机械式传感器(超声波雷达)。
- 局限性:
- 功能单一,无法协同工作。
- 依赖预设规则,无法处理复杂场景。
现在(2020年至今)
- 技术突破:
- 多传感器融合(摄像头+雷达+激光雷达)。
- 端到端深度学习模型(如特斯拉的纯视觉方案)。
- 高精度地图与V2X技术落地。
- 典型应用:
- L2+级自动驾驶(如小鹏NGP)。
- L4级Robotaxi试点(如Waymo、百度Apollo)。
未来(2030年后)
- 研究方向:
- AI算法优化:
- 更高效的模型(如Transformer架构)。
- 小样本学习与零样本学习。
- 传感器创新:
- 固态激光雷达(成本降低至$100以内)。
- 4D毫米波雷达(提升分辨率)。
- 车路协同(V2X):
- 车与车、车与基础设施实时通信。
- 伦理与安全:
- 自动驾驶的道德决策(如“电车难题”)。
- 系统冗余设计(备份传感器与控制单元)。
- AI算法优化:
四、传感器技术对比
1. 激光雷达(LiDAR)
- 优点:
- 高精度3D点云,可识别障碍物形状与距离。
- 强光/黑暗环境稳定工作。
- 缺点:
- 成本高(传统机械式$数千)。
- 易受雨雪干扰。
- 适用场景:L3及以上自动驾驶(如Waymo、蔚来ET7)。
2. 毫米波雷达
- 优点:
- 穿透雨雪、雾霾能力强。
- 成本低(约$100)。
- 缺点:
- 角分辨率低(无法识别行人细节)。
- 仅提供距离、速度等基础数据。
- 适用场景:L2级ACC/LKA(如特斯拉早期车型)。
3. 摄像头
- 优点:
- 成本低($几十)。
- 可识别颜色、文字(如交通标志)。
- 缺点:
- 依赖光线条件(夜间/强光下失效)。
- 需复杂算法处理图像。
- 适用场景:纯视觉方案(如特斯拉FSD、蔚来ET5)。
4. 超声波雷达
- 优点:
- 低成本,适合短距离检测。
- 缺点:
- 仅用于泊车(检测距离<5米)。
- 适用场景:自动泊车(APA)。
五、纯视觉方案 vs 激光雷达方案对比
| 维度 | 纯视觉方案(如特斯拉FSD) | 激光雷达方案(如Waymo) |
|---|---|---|
| 成本 | 低(依赖摄像头) | 高(激光雷达成本高昂) |
| 环境适应性 | 依赖光线条件(夜间/强光受限) | 强环境鲁棒性(全天候工作) |
| 数据处理 | 需强大算力与算法(如Transformer) | 点云数据处理复杂度高 |
| 感知精度 | 依赖图像识别(易受遮挡影响) | 高精度3D建模(障碍物识别强) |
| 技术成熟度 | 快速迭代(软件OTA升级) | 硬件迭代较慢 |
六、未来技术趋势
- 传感器融合:
- 激光雷达成本下降后,多传感器协同(摄像头+激光雷达+4D雷达)将成为主流。
- AI模型轻量化:
- 小模型(如MobileNet)降低算力需求,提升实时性。
- 边缘计算与云计算结合:
- 车端实时决策(边缘计算)+ 云端大数据训练(如特斯拉Dojo超级计算机)。
- 法规与伦理突破:
- 国际统一标准制定(如自动驾驶责任认定)。
- AI道德决策框架研究(如何处理紧急避险场景)。
总结
- 当前主流:L2+级辅助驾驶(依赖摄像头+雷达)。
- 技术竞争点:纯视觉(特斯拉) vs 多传感器融合(Waymo、小鹏)。
- 未来方向:L4级落地(限定区域)→ L5级全场景(需突破技术与法规瓶颈)。
通过传感器技术升级、AI算法优化及车路协同,辅助驾驶将逐步向完全自动驾驶演进,最终实现更安全、高效的出行方式。






![[连载]Transformer架构详解](https://i-blog.csdnimg.cn/direct/5c0929e48f7f41a498455d295488e37a.png)