01 查表法
在 our_arm_cos_f32 函数中,查表(Look-Up Table, LUT) 的核心是 预计算的正弦值表 sinTable_f32,通过巧妙利用余弦与正弦的相位关系实现快速余弦计算。以下是详细解析:
1. 查的是什么表?
(1) 表内容
表名:sinTable_f32(通常是一个全局常量数组)
存储内容:对正弦函数一个周期([0, 2π])的离散采样值。
长度:FAST_MATH_TABLE_SIZE(例如256点,即每 2π/256 ≈ 0.0245 弧度一个采样点)。
(2) 表的生成
表通常在编译时预计算,类似以下代码:
#define FAST_MATH_TABLE_SIZE 256
const float32_t sinTable_f32[FAST_MATH_TABLE_SIZE + 1] = {
0.0f, 0.024541f, 0.049068f, ..., 0.000000f //多一项:FAST_MATH_TABLE_SIZE + 1 是为了安全访问 index+1。
};
02 离散采样值
在数学和信号处理中,
离散采样值(Discrete Sampled Values)指的是对连续信号(如正弦波、余弦波)在特定时间或位置间隔上采集的
有限个数据点。这些点是对原始连续信号的数字化近似,用于计算机或嵌入式系统处理。以下是详细解释:
1. 离散采样值的本质
- 连续信号:如理想的余弦函数 cos(x)cos(x) 是无限平滑且连续的(任意 xx 都有对应的值)。
- 离散采样:在连续信号上按固定间隔(如每 ΔθΔθ 弧度)取点,生成有限个数值,形成一张查找表(LUT)。
示例:对 cos(x)cos(
x) 在 [0,2π][0,2
π] 区间内采样256次,得到256个离散值。
2. 在代码中的具体体现
在
our_arm_cos_f32 函数中:
- sinTable_f32就是一个离散采样表,存储了正弦函数在一个周期内的256(或其它数量)个等间隔采样值。

例如:
FAST_MATH_TABLE_SIZE=256 时,
Δ
θ≈0.0245 弧度。
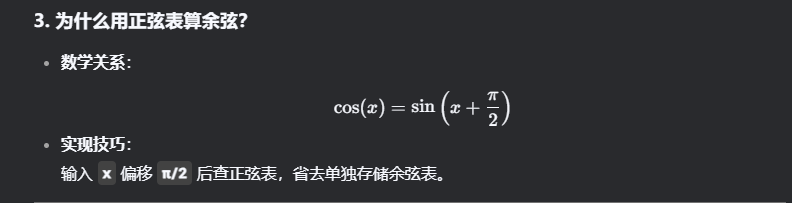
3. 为什么需要离散采样?
|
场景
|
连续函数
|
离散采样
|
|
计算方式
|
实时计算(如泰勒展开)
|
预计算后查表
|
|
速度
|
慢(需多次浮点运算)
|
快(直接内存访问)
|
|
资源占用
|
低(仅需代码)
|
高(需存储表)
|
|
适用场景
|
高精度通用计算
|
实时嵌入式系统(如电机控制)
|
4. 离散采样的工作原理
(1) 采样过程
假设对 sin(x)采样,生成表:
import numpy as np
FAST_MATH_TABLE_SIZE = 8
x_samples = np.linspace(0, 2*np.pi, FAST_MATH_TABLE_SIZE, endpoint=False)
sin_table = np.sin(x_samples) # 得到离散采样值:[0.0, 0.707, 1.0, 0.707, 0.0, -0.707, -1.0, -0.707](2) 查表示例
计算 cos(0.785)cos(0.785)(即 π/4≈0.785
π/4≈0.785 弧度):
- 转换相位:cos(0.785)=sin(0.785+π/2)=sin(2.356)
- 归一化索引:2.356/(2π)×8≈3.0 → 索引 3(第4个点)
- 查表:sin_table[3] = 0.707 → 结果 cos(0.785)≈0.707
5. 插值的作用
离散采样会引入
量化误差,通过插值可提高精度:
- 线性插值:
若索引非整数(如3.5),取相邻两点(索引3和4)的加权平均:
其中 α 是小数部分(如3.5的 α=0.5)。
6. 实际应用中的权衡
- 表越大
:精度越高,但内存占用增加(如512点占2KB内存)。
- 表越小
:速度更快,但误差增大(电机控制中典型用256点,误差±0.1%)。
总结
离散采样值是通过
预先存储连续函数的有限个关键点,用查表代替实时计算的一种优化技术。在嵌入式系统(如ODrive的电机控制)中,它实现了:
- 极速计算:比实时计算快10倍以上
- 可控精度:通过调整采样密度平衡性能
- 资源节省:共享正弦/余弦表,减少重复存储
这种方法的代价是
内存占用和
轻微的精度损失,但在实时性要求高的场景(如FOC算法)中至关重要!
03 代码实现 float32_t our_arm_cos_f32(float32_t x)
这段代码实现了一个优化的浮点余弦函数 (our_arm_cos_f32) ,主要用于实时嵌入式系统中的快速三角函数计算。以下是详细解析:
函数功能
- 输入:弧度值 x(范围无限制,自动处理周期性)
- 输出:cos(x) 的近似值(基于查表和线性插值)
- 特点:
- 比标准库 cosf() 更快(适合实时控制)
- 牺牲少量精度换取速度
- 依赖预计算的 sinTable_f32(正弦表)
float32_t our_arm_cos_f32(float32_t x)
{
float32_t cosVal, fract, in; /* Temporary variables for input, output */
uint16_t index; /* Index variable */
float32_t a, b; /* Two nearest output values */
int32_t n;
float32_t findex;
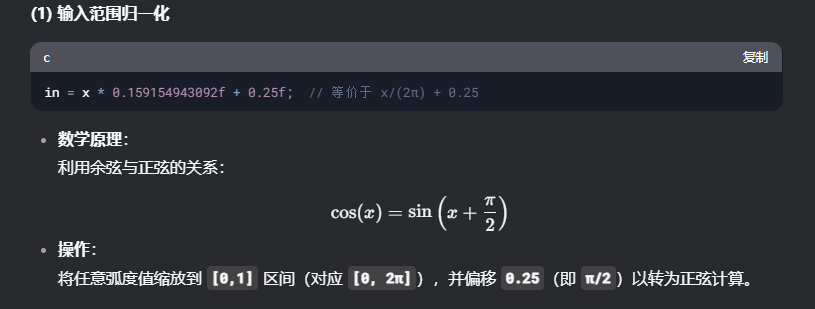
// 转换为正弦计算:cos(x) = sin(x + π/2)
in = x * 0.159154943092f + 0.25f; // 等价于 x/(2π) + 0.25
//周期处理:利用三角函数的周期性,将输入映射到第一个周期 [0,1]。
n = (int32_t) in;// 取整数部分
if (in < 0.0f) //处理负数输入
{
n--;
}
/* Map input value to [0 1] */
in = in - (float32_t) n; // 取小数部分
//查表索引计算:
findex = (float32_t)FAST_MATH_TABLE_SIZE * in; //FAST_MATH_TABLE_SIZE:正弦表长度(如256),决定精度和内存开销。
index = (uint16_t)findex; //fract:插值权重(距离上一个表项的比例)。
if (index >= FAST_MATH_TABLE_SIZE) {
index = 0;
findex -= (float32_t)FAST_MATH_TABLE_SIZE; // 小数部分用于插值
}
/* fractional value calculation */
fract = findex - (float32_t) index;
//线性插值:用相邻两个表项的值线性组合,减少查表误差。
a = sinTable_f32[index]; // 当前表项值
b = sinTable_f32[index+1]; // 下一表项值
/* Linear interpolation process */
cosVal = (1.0f-fract)*a + fract*b; // 加权平均
/* Return the output value */
return (cosVal);
}
/**
* @} end of cos group
*/

![[ctfshow web入门] web38](https://i-blog.csdnimg.cn/direct/4956b6207b4441b8bd63cf1cfcc6181f.png)