BetaFlight参数配置解读
- 📌相关篇《Betaflight固件编译和烧录说明》
- 🥕各型号已编译好的配置文件资源(
.config):https://github.com/betaflight/unified-targets/tree/master/configs/default - 🌿各型号配置头文件(
.h):https://github.com/betaflight/config/tree/master
已编译好的配置文件资源(
.config)可以直接在地面站配置软件Betaflight Configurator中被加载,可对飞控板进行一次性配置操作。
- 🔧地面站配置软件
Betaflight Configurator:https://github.com/betaflight/betaflight-configurator/releases - 🌿其他网友的说明《BetaFlight统一硬件配置文件研读》
- 如何为Betaflight创建飞行控制器配置文件:
https://betaflight.com/docs/development/manufacturer/creating-configuration - 📍BF wiki 中文站:
https://pitronic.gitbook.io/betaflight/configuration/resource-remapping
型号参数配置文件在上面资源的文件夹下:
unified-targets\configs\default中,配置文件(.config)可以直接被飞控地面站软件Betaflight Configurator加载进去。
📗timer定时器配置参数说明
- timer参数配置的是硬件timer定时器通道引脚以及对应的复用功能号。该通道引脚主要功能是给WS2812以及电机提供驱动信号。以上外设驱动引脚只能切换到相关定时器通道引脚上,如果切换到其它引脚上则无效。
- 🌟 timer定时器通道和引脚配置的作用是为了输出
PWM信号,这个PWM信号是给支持此信号控制的ESC电调和WS2812(LED_STRIP)。
# timer
timer C06 AF3
# pin C06: TIM8 CH1 (AF3)
timer C07 AF3
# pin C07: TIM8 CH2 (AF3)
timer C08 AF3
# pin C08: TIM8 CH3 (AF3)
timer C09 AF3
# pin C09: TIM8 CH4 (AF3)
timer B06 AF2
# pin B06: TIM4 CH1 (AF2)
timer B08 AF2
# pin B08: TIM4 CH3 (AF2)
timer B07 AF2
# pin B07: TIM4 CH2 (AF2)
timer B01 AF2
# pin B01: TIM3 CH4 (AF2)
timer B09 AF3
# pin B09: TIM11 CH1 (AF3)
timer A15 AF1
# pin A15: TIM2 CH1 (AF1)
timer B14 AF9
# pin B14: TIM12 CH1 (AF9)
# dma
dma ADC 1 0
# ADC 1: DMA2 Stream 0 Channel 0
dma pin C06 1
# pin C06: DMA2 Stream 2 Channel 7
dma pin C07 1
# pin C07: DMA2 Stream 3 Channel 7
dma pin C08 1
# pin C08: DMA2 Stream 4 Channel 7
dma pin C09 0
# pin C09: DMA2 Stream 7 Channel 7
dma pin B06 0
# pin B06: DMA1 Stream 0 Channel 2
dma pin B08 0
# pin B08: DMA1 Stream 7 Channel 2
dma pin B07 0
# pin B07: DMA1 Stream 3 Channel 2
dma pin B01 0
# pin B01: DMA1 Stream 2 Channel 5
dma pin A15 0
# pin A15: DMA1 Stream 5 Channel 3
在上面的配置中,
-
timer C06 AF3:代表配置 定时器8 通道1 C06引脚 对应的复用功能号:AF3 -
# pin C06: TIM8 CH1 (AF3):前面#代表是注释内容,TIM8:代表配置的是定时器8,CH1代表通道,引脚对应的复用功能号是AF3. -
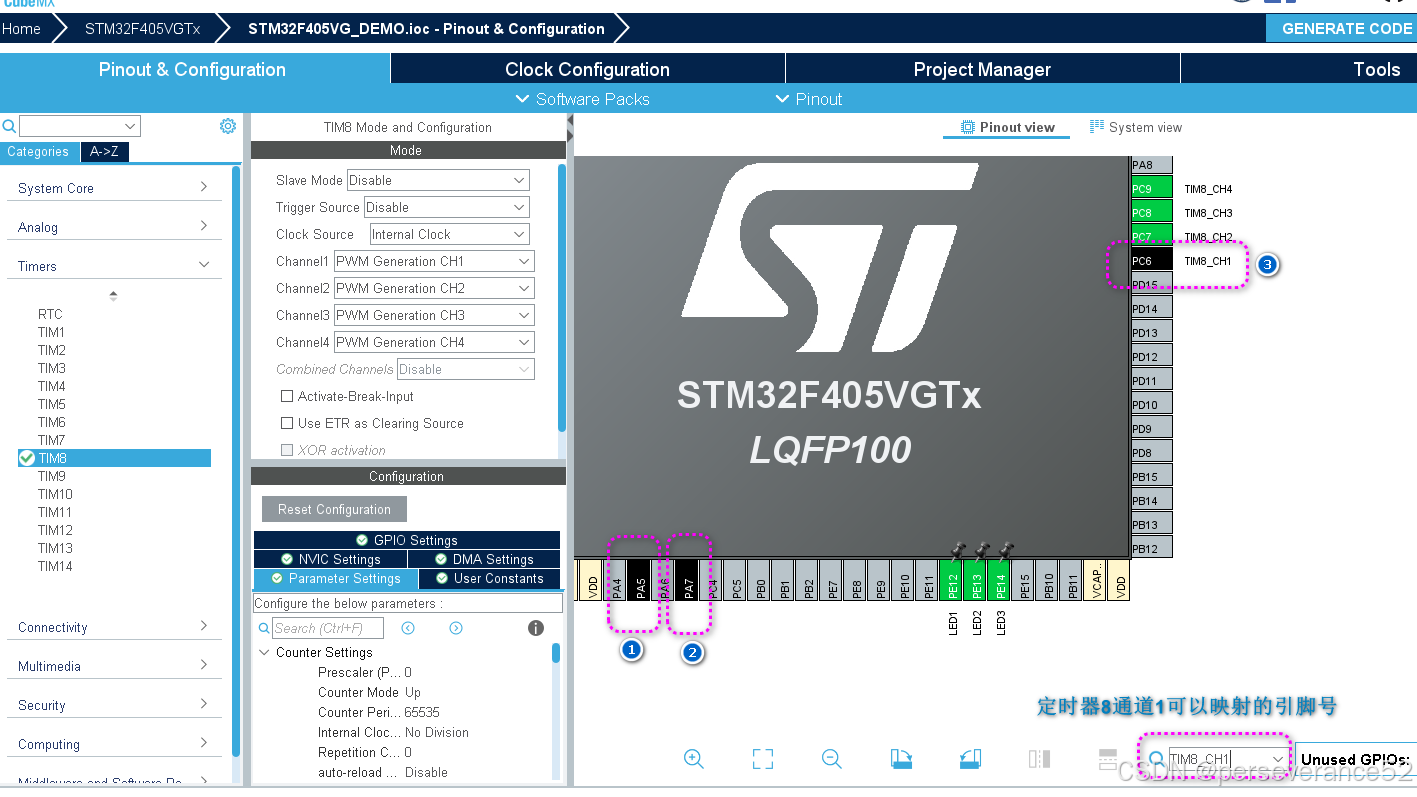
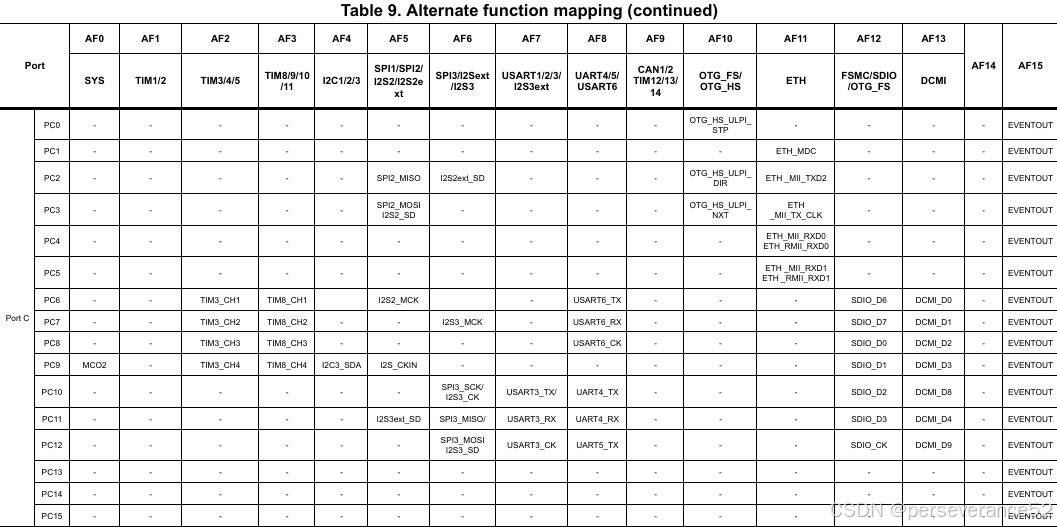
不明白的话,再看一张timer定时器功能配置图:

-
- TIM8定时器8通道1可以映射的引脚有3个:(复用的
AFx中的x不是随便填写的,一定要与对应的mcu硬件相符才行)
- TIM8定时器8通道1可以映射的引脚有3个:(复用的
-
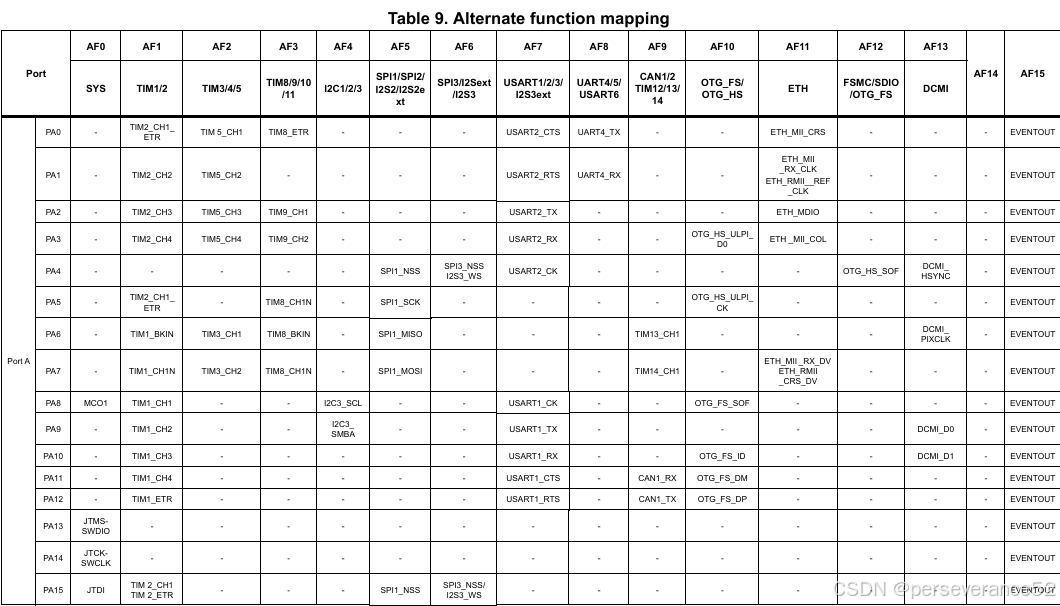
🔖如果没有对应配置软件查询,可以在对应数据手册的"
Pinouts and pin description"部分,找到具体的映射关系:
I2C外设参数
对于STM32F405可以连接SSD1306 I2C OLED屏幕,可以在调参时显示。
- 配置命令和参数::
resource I2C_SCL 1 B08
resource I2C_SDA 1 B09
WS2812灯带参数
用于连接ws2812灯带。
- 配置命令和参数::
resource LED_STRIP 1 B06
📘电机配置
这里的电机引脚配置,只能是前面的timer定时器pwm中的通道。
resource MOTOR 1 C06
resource MOTOR 2 C07
resource MOTOR 3 C08
resource MOTOR 4 C09
resource MOTOR 5 B00
resource MOTOR 6 B01
蜂鸣器
resource BEEPER 1 B05
电池电压采集
只能配置到ADC采集通道引脚上
resource ADC_BATT 1 C02
电流采集
只能配置到ADC采集通道引脚
resource ADC_CURR 1 C01
接收机引脚
- ppm信号
resource PPM 1 B06
摄像头控制
resource CAMERA_CONTROL 1 B03
连接信号强度
只能配置到ADC采集通道引脚
resource ADC_RSSI 1 A00
SPI外设和片选(CS)引脚
SPI外设是给SPI接口的陀螺仪、黑匣子(SPI FLASH)、
resource FLASH_CS 1 B12
resource OSD_CS 1 A15
# 陀螺仪中断信号引脚
resource GYRO_EXTI 1 C04
# 陀螺仪片选引脚
resource GYRO_CS 1 A04
串口
可以连接串口设备,例如GPS模块
esource SERIAL_TX 1 A09
resource SERIAL_TX 2 A02
resource SERIAL_TX 3 B10
resource SERIAL_TX 4 A00
resource SERIAL_TX 5 C12
resource SERIAL_RX 1 B07
resource SERIAL_RX 2 A03
resource SERIAL_RX 3 B11
resource SERIAL_RX 4 A01
resource SERIAL_RX 5 D02
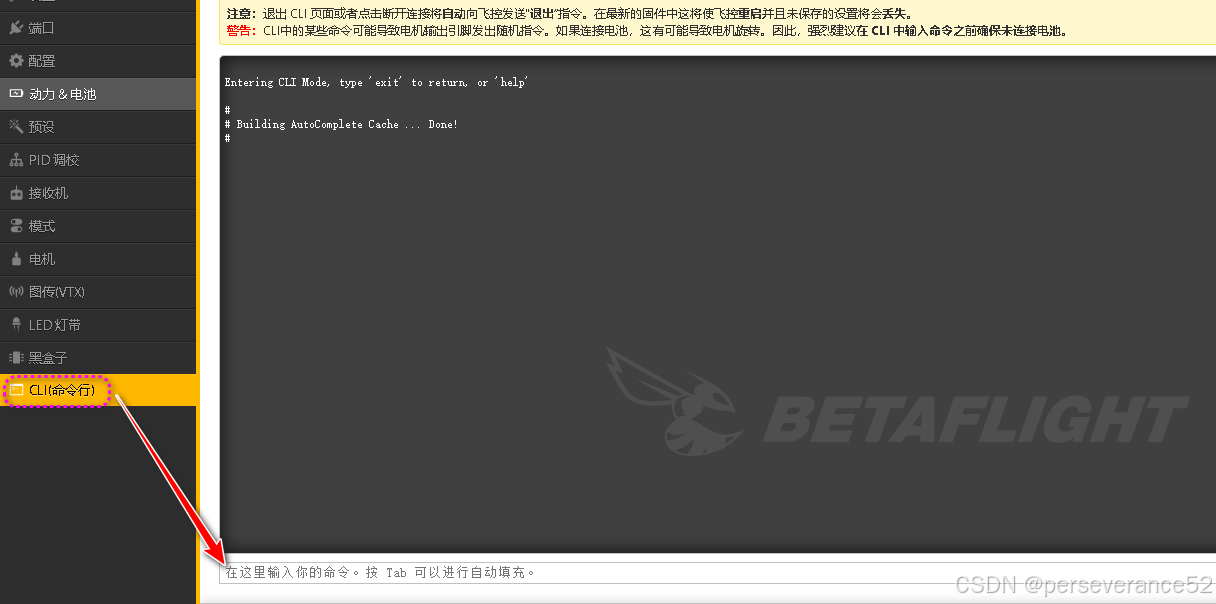
📗配置方法
- 🌿配置软件:
Betaflight Configurator:https://github.com/betaflight/betaflight-configurator/releases
- 通过飞控的USB Type-C连接电脑。
- 在左侧菜单栏找到CLI命令行。
- 在输入框输入指令,按
ENTER回车键。
- 支持单条指令配置,也支持加载对应的飞控型号的.config文件进行配置。
- 发送
save按回车,进行保存。(这一步一定要记得做,不然前面发送的指令不会保存的。) - 发送完成
save命令后,飞控会自动重启。
- 各飞控厂商型号的配置文本:
https://github.com/betaflight/config
🛠resource资源配置细节
- resource命令配置
resource - show/set resources
<> | <resource name> <index> [<pin>|none] | show [all
- 查看资源分配 :
resource show
- 显示当前所有已分配的资源。
resource show all
- 设置资源 :
resource <resource_name> <index> <pin>
- 配置电机引脚
resource MOTOR 5 B00
- 取消资源分配 :
resource MOTOR 5 none


![C++Cherno 学习笔记day17 [66]-[70] 类型双关、联合体、虚析构函数、类型转换、条件与操作断点](https://i-blog.csdnimg.cn/direct/8c6724e47ffa4978affd9ff500a1507c.png)