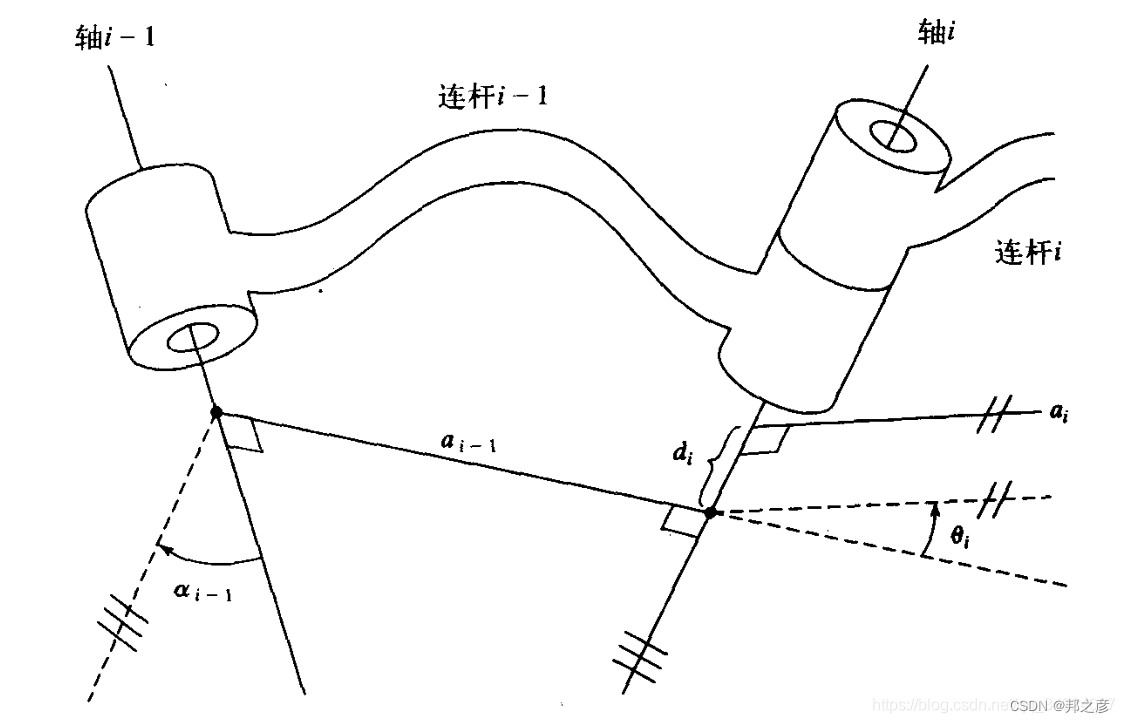
- 连杆原理
| 符号 | 中文名 | 含义 |
|---|---|---|
| a a a | 连杆长度 | 两个相邻关节轴之间的公垂线的长度 |
| α \alpha α | 连杆转角 | 两个相邻关节间轴之间形成的角度,右手定则前一个轴到后一个轴 |
| d d d | 连杆偏距 | 两个相邻连杆之间的距离,高度差 |
| θ \theta θ | 关节角 | 两个相邻杆绕公共关节轴旋转的角度 |
- 机器人本体

| 轴号 | Column 2 |
|---|---|
| 1轴 | 链接底盘的位置,也是承重和核心位置,承载着整个机器人的重量和机器人左右水平的大幅度摆动 |
| 2轴 | 前后摆动、伸缩 |
| 3轴 | 前后摆动,摆动幅度比2轴要小很多,这也是6轴机器人臂展长的根据 |
| 4轴 | 相当于人的小臂,控制上臂部分180度自由旋转 |
| 5轴 | 相当于人的手腕,调好大致位置后,用5轴进行精准定位 |
| 6轴 | 相当于一个可以水平旋转360度的转盘,可以更精确的定位产品 |
小臂部分有连个轴,一个控制前后摆动[3轴],一个控制旋转[4轴]。
| 6轴机器人的特点 | |
|---|---|
| 优点 | 1、有很高的自由度,6轴,适合于几乎任何轨迹或角度的工作。 2、可以自由编程,完成全自动化的工作提高生产效率,可控制的错误率。 3、功能特性,操作非常简便,可实现不同工件之间的灵活快捷更换。 4、具有很高的可达性,可以使其手部进入封闭空间内作业,而直角坐标式机器人不能进行此类作业。 5、代替很多不适合人力完成、有害身体健康的复杂工作。 |
| 缺点 | 1、价格高,导致初期投资的成本高。 2、生产前的大量准备工作,比如,编程和计算机模拟过程的时间耗费长。 3、肘关节和肩关节轴线是平行的,当大、小臂舒展成一直线时,虽能抵达很远的工作点,但机器人的结构刚度比较低。 |