No.1 基于可见性的近似追逃方法
-
论文标题:Approximate Methods for Visibility-Based Pursuit–Evasion
-
中文标题:基于可见性的近似追逃方法
-
作者:Emmanuel Antonio; Israel Becerra; Rafael Murrieta-Cid
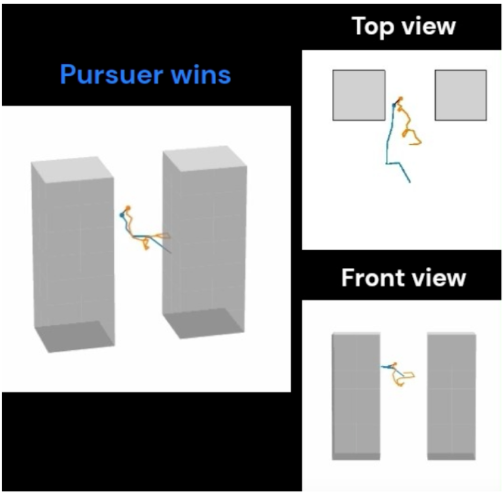
本文提出了一种基于采样的动态规划方法,用于求解复杂多角度障碍环境中的视觉追逃问题,提供了一种有效且近似的解法。创新点在于将最优概率路网(PRM*)与动态规划中的值迭代相结合,使用单一图结构编码追逃双方的状态及动作,从而构建一个高效的最优路径生成算法。理论上证明了该方法的离散解在采样趋近于无穷时可收敛至Hamilton-Jacobi-Isaacs (HJI)方程的连续解,仿真表明在2D和3D环境中的25,000个采样点条件下,仅需82次迭代便可实现收敛。
No.2 一种用于机器人联盟任务分配的分布式拍卖算法
-
论文标题:A Distributed Auction Algorithm for Task Assignment With Robot Coalitions
-
中文标题:一种用于机器人联盟任务分配的分布式拍卖算法
-
作者:Ruiliang Deng; Rui Yan; Peinan Huang; Zongying Shi; Yisheng Zhong
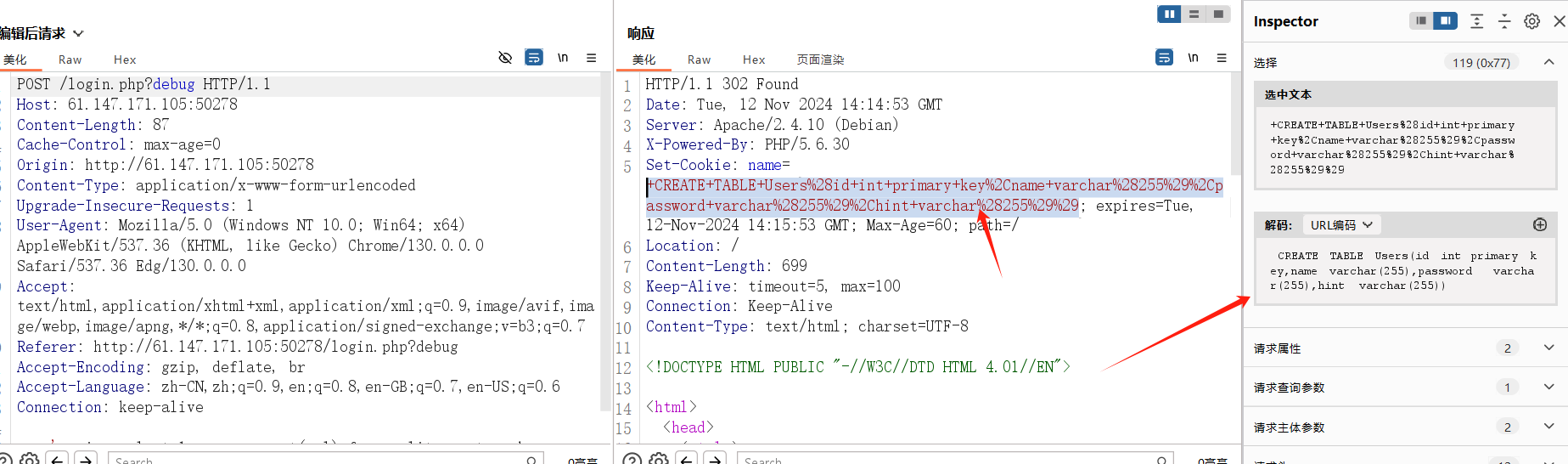
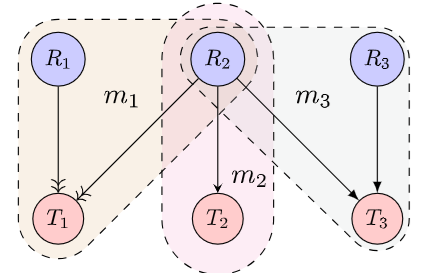
本文提出了一种分布式拍卖算法,用于解决机器人联盟中的任务分配问题,特别是针对多机器人协同完成特定任务的场景。该算法利用-联盟竞争均衡(-CCE)作为近似解,确保在有限轮次内达到性能保证,并且算法能够适应任务的动态变化,适用于具有动态性和分布式需求的多机器人系统。实验结果表明,所提出的算法在完成任务数量和资源分配效率上表现出良好性能,且在机器人数量与任务数量的倍增情况下依然能够保证分配效果的合理性和稳定性。
image
No.3 机器人中矩阵加权状态估计问题的半正定松弛法
-
论文标题:On Semidefinite Relaxations for Matrix-Weighted State-Estimation Problems in Robotics
-
中文标题:机器人中矩阵加权状态估计问题的半正定松弛法
-
作者:Connor Holmes; Frederike Dümbgen; Timothy Barfoot
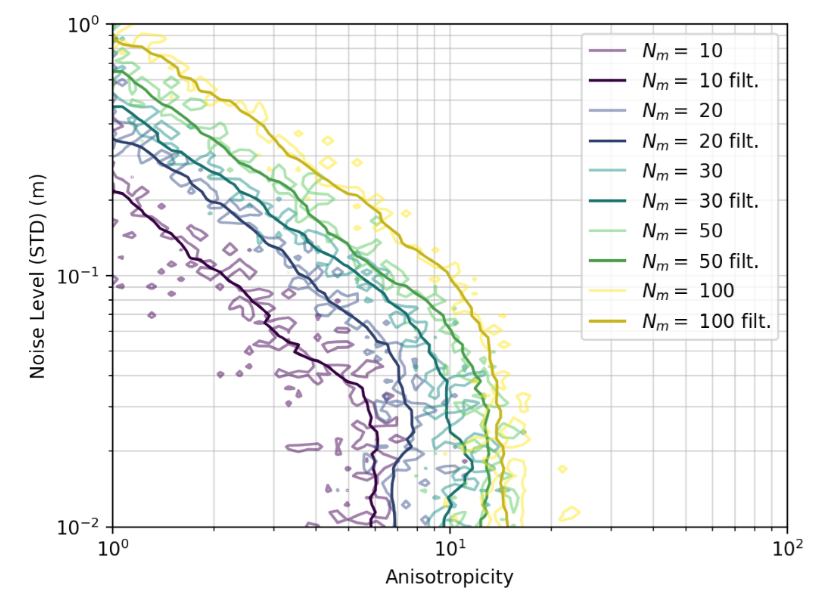
本文研究了在具有各向异性噪声的矩阵加权状态估计问题中,半定松弛方法的紧致性表现。通过理论分析和实验验证,作者发现当引入矩阵加权因子时,半定松弛的紧致性会因噪声水平的提高而显著下降,尤其在各向异性噪声存在的情况下更为明显。为了应对这一挑战,本文提出了利用冗余约束来恢复松弛紧致性的方法,实验证明这些约束在噪声较高的环境中也能保证松弛结果的准确性。研究还揭示了状态估计后验不确定性与松弛的证书矩阵之间的联系,为进一步优化机器人感知和状态估计问题提供了理论支持。
image
No.4 过冲击感知路径规划和串联离合驱动提高高速工业机器人的抗碰撞能力
-
论文标题:Improving the Collision Tolerance of High-Speed Industrial Robots via Impact-Aware Path Planning and Series Clutched Actuation
-
中文标题:过冲击感知路径规划和串联离合驱动提高高速工业机器人的抗碰撞能力
-
作者:Frederik Ostyn; Bram Vanderborght; Guillaume Crevecoeur
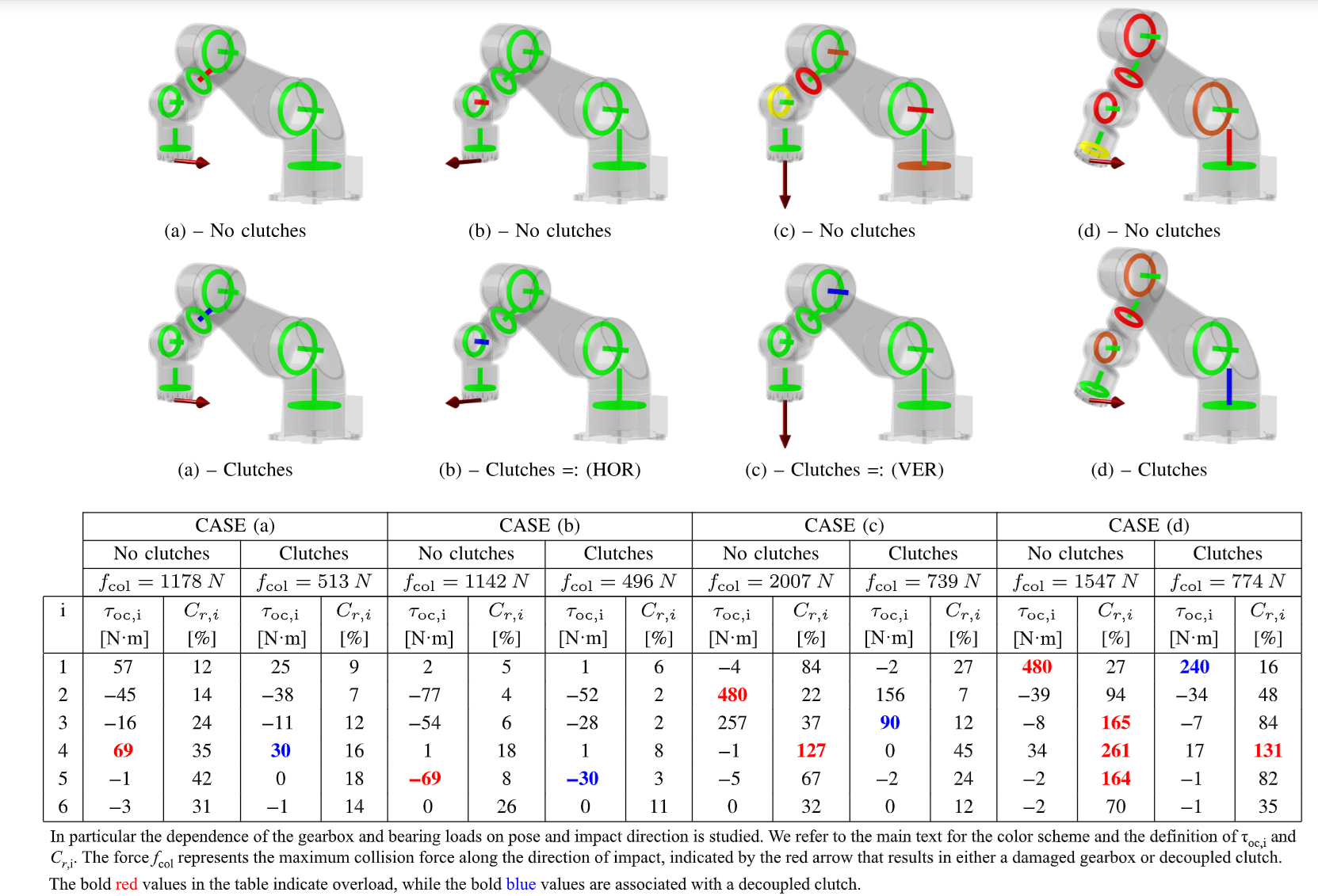
本文提出了一种结合碰撞感知路径规划和串联离合驱动的策略,以提升高速工业机器人的碰撞容忍度。创新点在于通过“碰撞感知”路径规划减少潜在的硬件损害,特别是对关键齿轮箱和轴承的过载保护,并在设计中引入了串联离合器驱动,能在发生碰撞时自动解耦以降低撞击力。在实验中,定制的六轴机器人通过串联离合器保护,在速度达到1.2 m/s的碰撞中仍能有效避免对硬件的损害。验证结果显示,与传统方法相比,该方案能在多方向冲击下实现显著的硬件保护和路径优化效果。
image
No.5 基于高斯过程回归的黑盒物理信息估计器用于机器人逆动力学识别
-
论文标题:A Black-Box Physics-Informed Estimator Based on Gaussian Process Regression for Robot Inverse Dynamics Identification
-
中文标题:基于高斯过程回归的黑盒物理信息估计器用于机器人逆动力学识别
-
作者:Giulio Giacomuzzo; Ruggero Carli; Diego Romeres; Alberto Dalla Libera
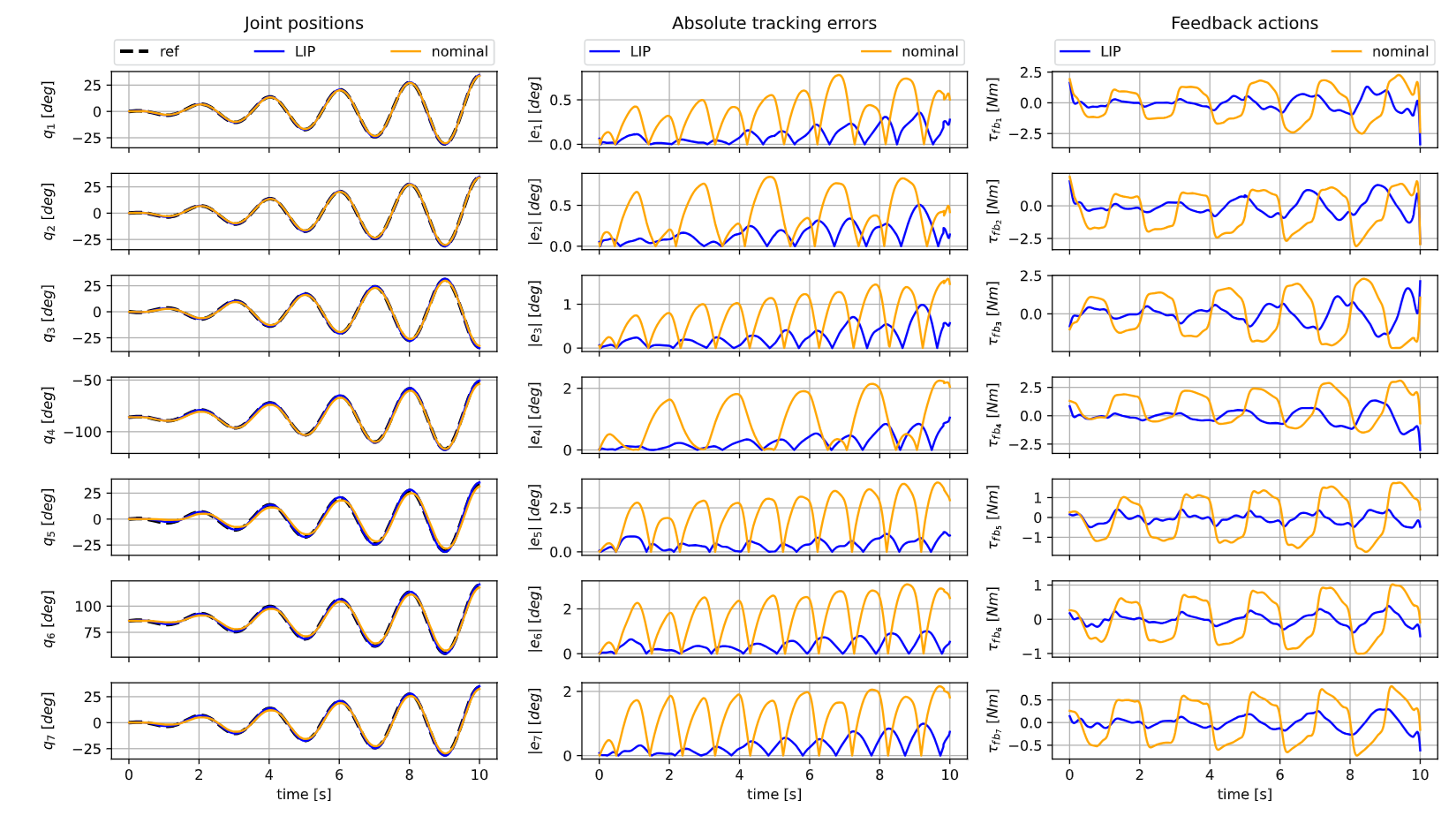
本文提出了一种基于高斯过程回归(GPR)的黑箱物理约束估计器,用于机器人逆动力学的识别,特别是通过多维拉格朗日多项式内核(LIP内核)来提升估计精度。该模型采用物理先验,以系统的动能和势能为GP模型的基础,利用线性算子将其转化为关节力矩的估计。实验表明,该方法在MELFA RV4FL等真实机器人系统上优于现有的黑箱估计器,能够在减少训练样本的情况下实现高效的数据利用和良好的外推性能,与依赖精确物理模型的传统方法相比表现出更强的泛化能力和精度,验证了物理嵌入型学习在数据效率和模型鲁棒性方面的优势。
image
No.6 基于学习的实时音乐伴奏的人机协作钢琴演奏
-
论文标题:Human–Robot Cooperative Piano Playing With Learning-Based Real-Time Music Accompaniment
-
中文标题:基于学习的实时音乐伴奏的人机协作钢琴演奏
-
作者:Huijiang Wang; Xiaoping Zhang; Fumiya Iida
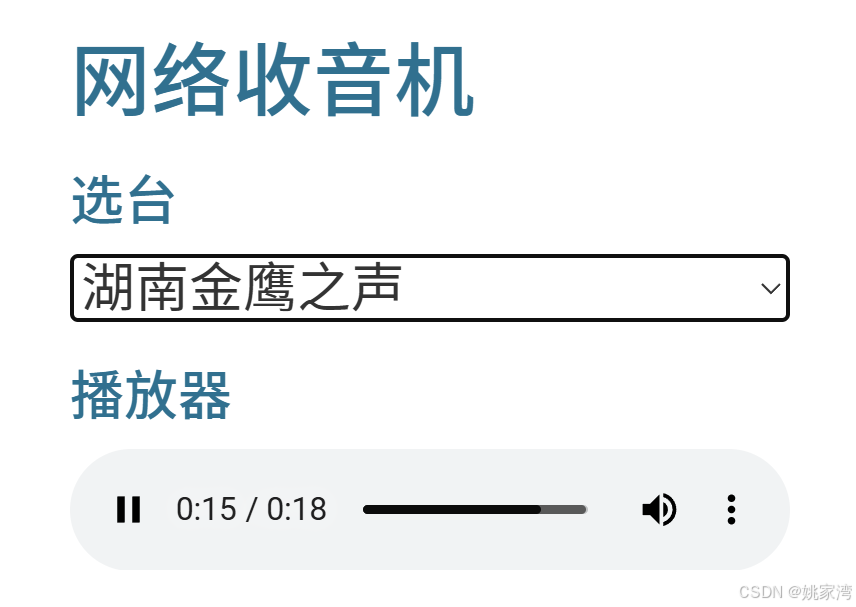
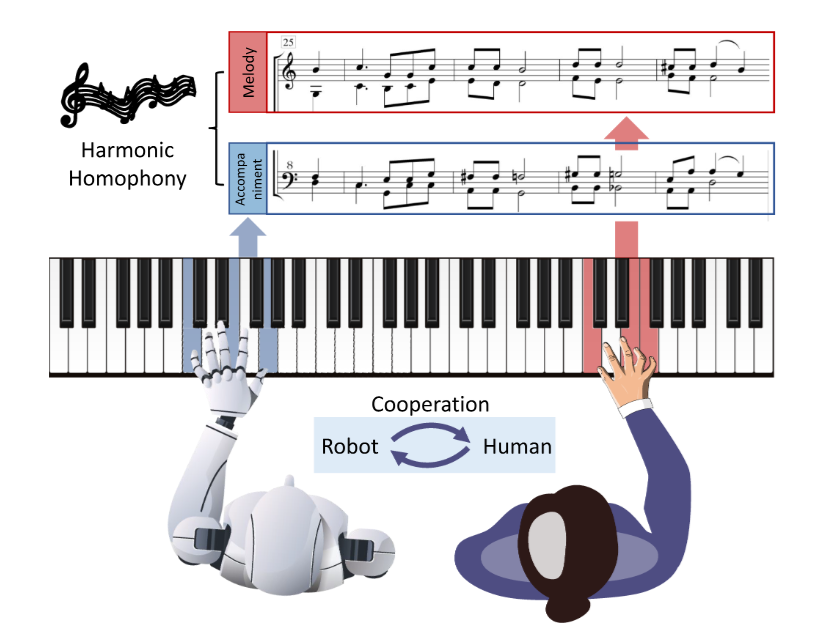
本文提出了一种学习驱动的人机协作钢琴演奏系统,采用递归神经网络(RNN)实现机器人与人类演奏者的实时音乐伴奏。系统通过非言语信号(MIDI信号、视觉和音频反馈)进行交互,实现了和谐的和弦伴奏。实验结果显示,该系统在四种反馈条件下的同步指数达到0.9987,在动态节奏转换和不同人机时间间隙的测试中保持平均时间间隙低于0.06秒。此框架在实时伴奏和和谐匹配上表现出色,为实现人机共创的音乐演奏提供了有效解决方案。
点击下方卡片
第一时间获取最热行业热点资讯,最新智驾机器人行业技术