这个项目介绍了如何制作和控制一只仿生手。作者最初受到Instagram上一个视频的启发,该视频展示了使用MPU6050传感器追踪手部动作并在屏幕上显示3D模型。作者决定将这个想法进一步发展,使用OpenCV来控制一只真实的仿生手。
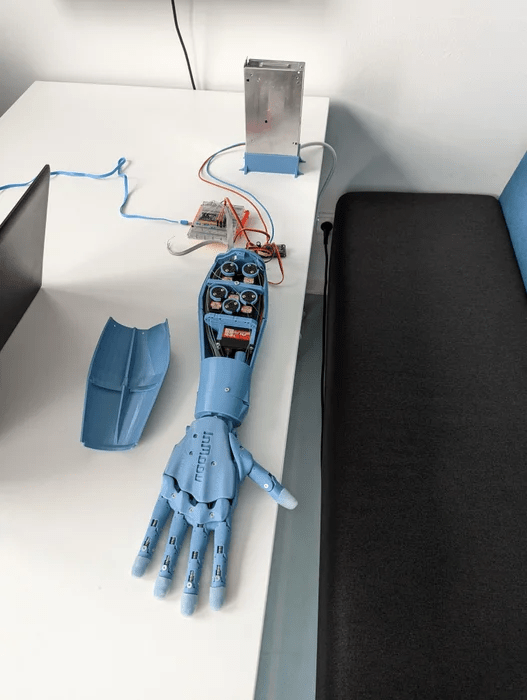
大家好,在这篇教程中,我想和大家分享一下如何制作并控制一只自己的仿生手。这个想法源于我在无意中刷Instagram时,看到一段短视频:一个人通过MPU6050传感器来跟踪手部运动,并在屏幕上显示手的3D模型。因为我之前也使用过这个传感器,所以觉得这个我也能完成。我一直喜欢将编程与现实世界结合起来,于是我想,为什么不将这些测量数据传输到一个真实的仿生手上呢?后来我决定,使用OpenCV代替MPU6050会更加高效,部分原因也是我想借此机会学习另一种技能。
特别感谢Gaël Langevin,他在InMoov项目中设计了这个手的模型,并慷慨地分享了出来。
所需材料
InMoov手及前臂
- 3D打印机
- 焊接工具
- 约1公斤的耗材(PETG 或 ABS 或 PLA)
- 3米钓鱼线(能承重约20公斤)
- 5根扩展弹簧(3/16″ x 1-3/4)
- RTV硅胶 Ecoflex™ 00-10
螺丝、螺母和螺栓
- 10个M2x4平头木螺丝
- 10个M3x4mm平头螺丝
- 4个M3x12mm平头木螺丝
- 20个M3x12mm平头螺丝
- 25个M3x16mm平头螺丝
- 10个M3x20mm平头螺丝
- 35个M3螺母
电子元件
- 1块ESP32 38-pin 开发模块
- 1根micro USB数据线
- 5个线性霍尔传感器(49E)
- 5个直径2.5mm x 1mm的磁盘磁铁
- 1根16芯彩排线
- 5个1k电阻
- 5个2k电阻
- 6个伺服电机(JX PDI-6225MG-300)
- 1块定制PCB(可选)
- 1个电源(理想情况下为6V或5V,功率约100W,因为每个伺服电机的电流可达3A)
步骤1:3D打印手部
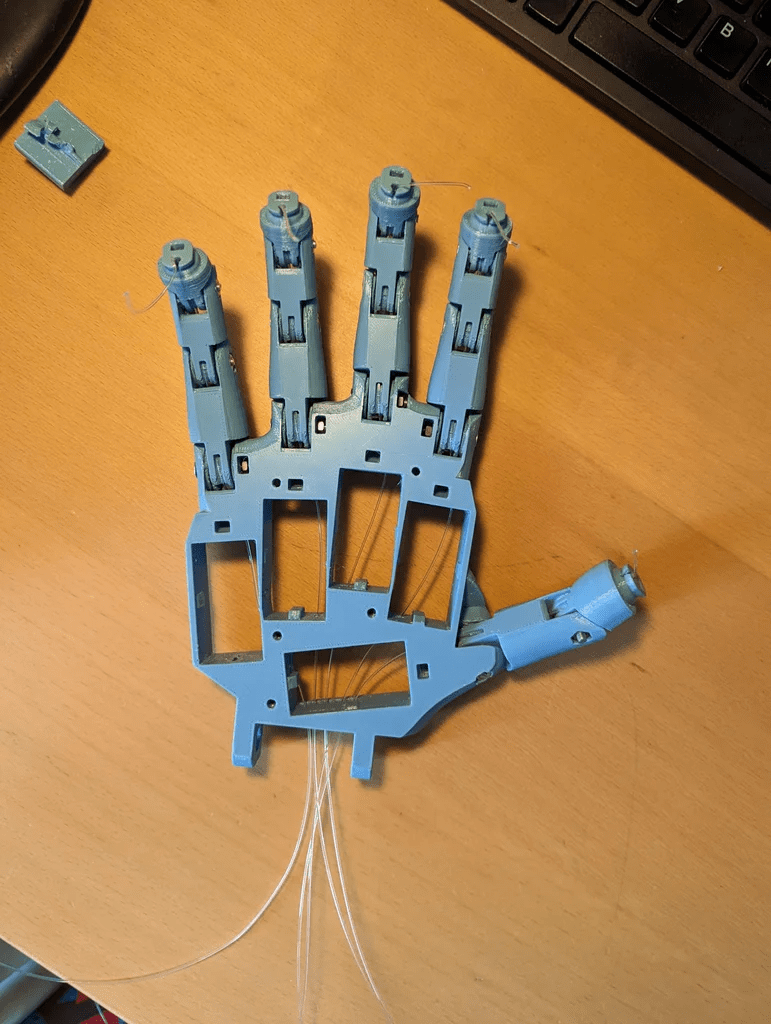

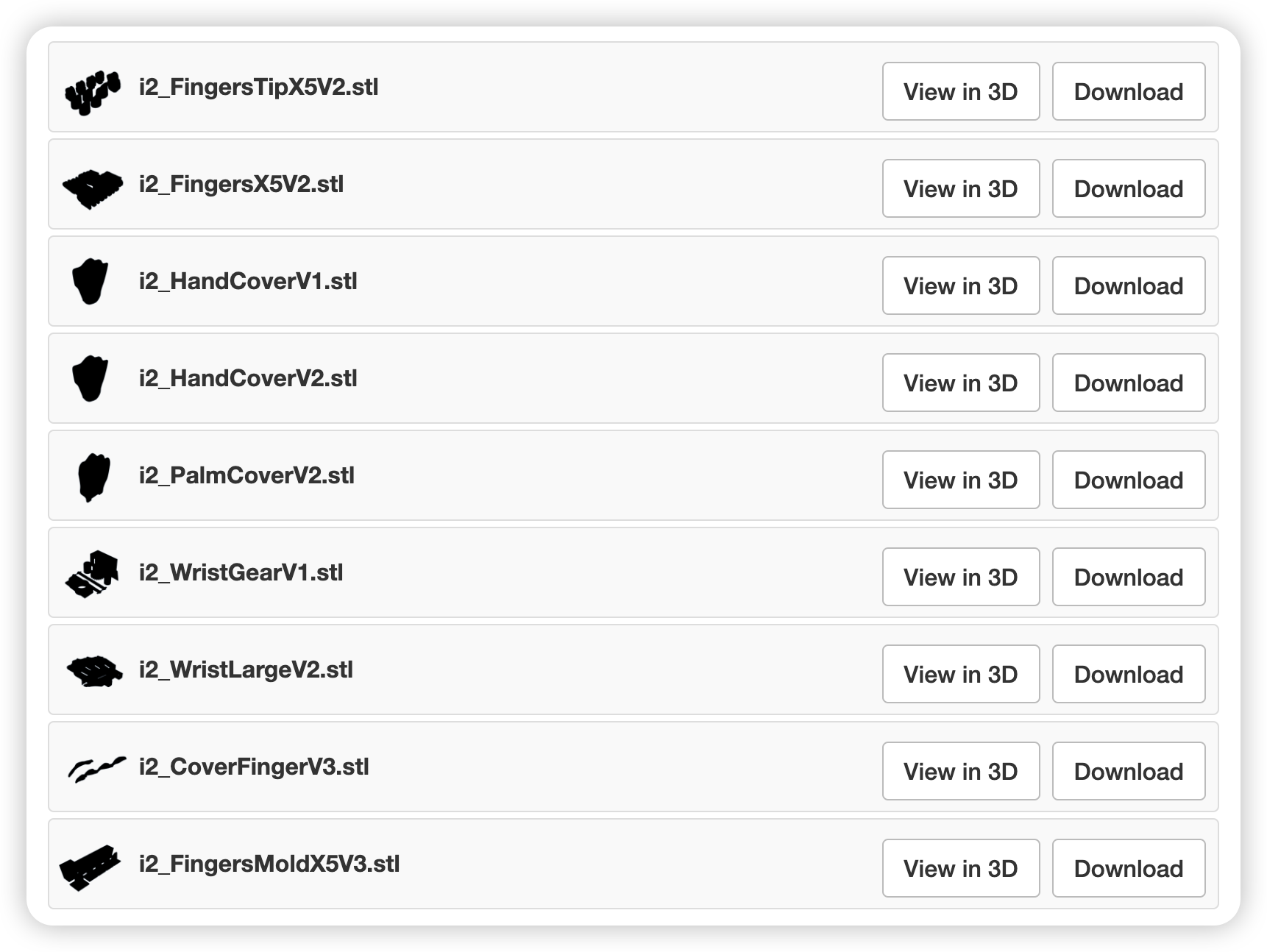
3D打印文件见文末。
打印时,建议使用稍高的填充率(约30%),以提高部件的耐用性。关于材料,InMoov使用的是ABS,不过如果你没有稳定打印ABS的设备,PETG或PLA同样可以使用。
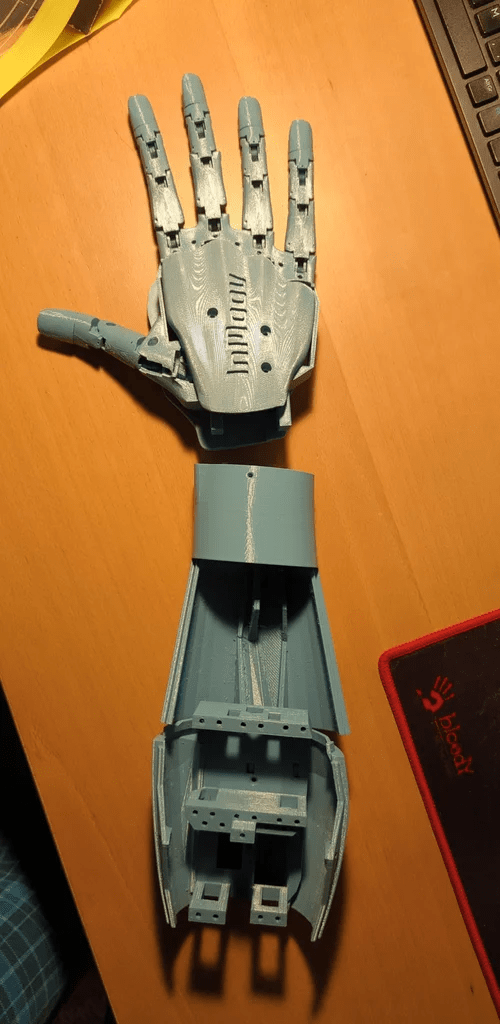
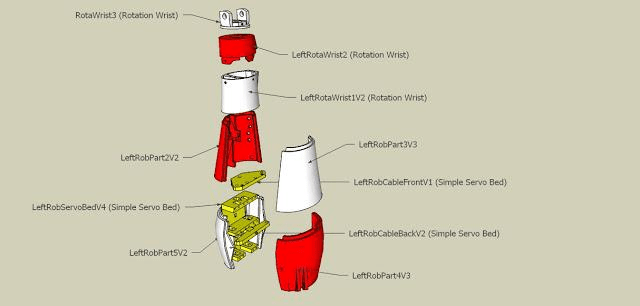
步骤2:3D打印前臂
同样地,手部所需的文件如下,并且也在inmoov STL零件库中。请注意,在inmoov零件库中有原版inmoov机器人的文件。这个手是i2版本,因此你只需要前臂部分的一些零件。另外一个需要注意的是,当打印Bolt_entretoise7时,你只需要中间的螺栓和夹子(其他部分是为旧版手设计的)。
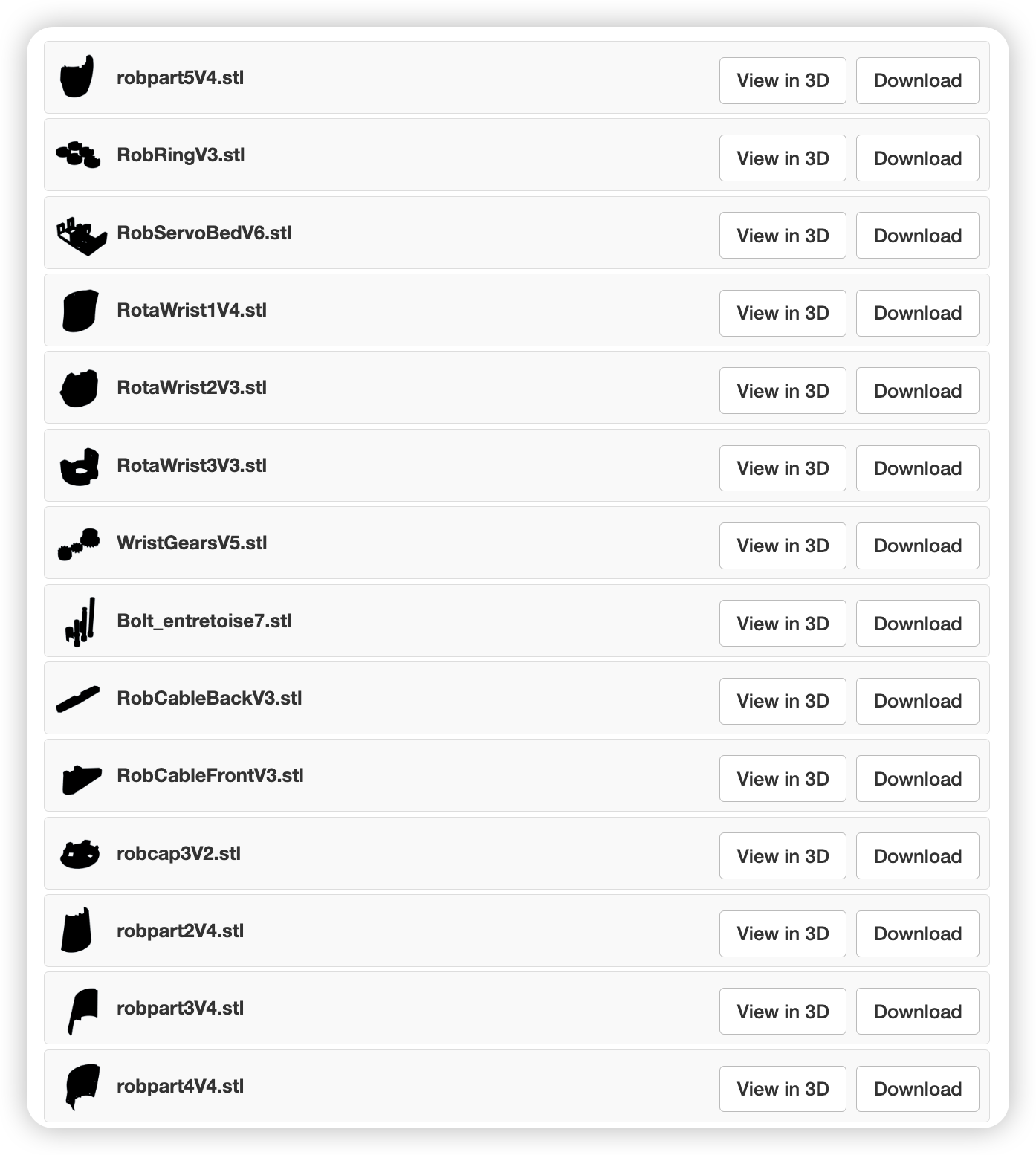
3D打印文件文末下载。
你还可以打印一个我自己在Fusion 360中设计的小展示支架。
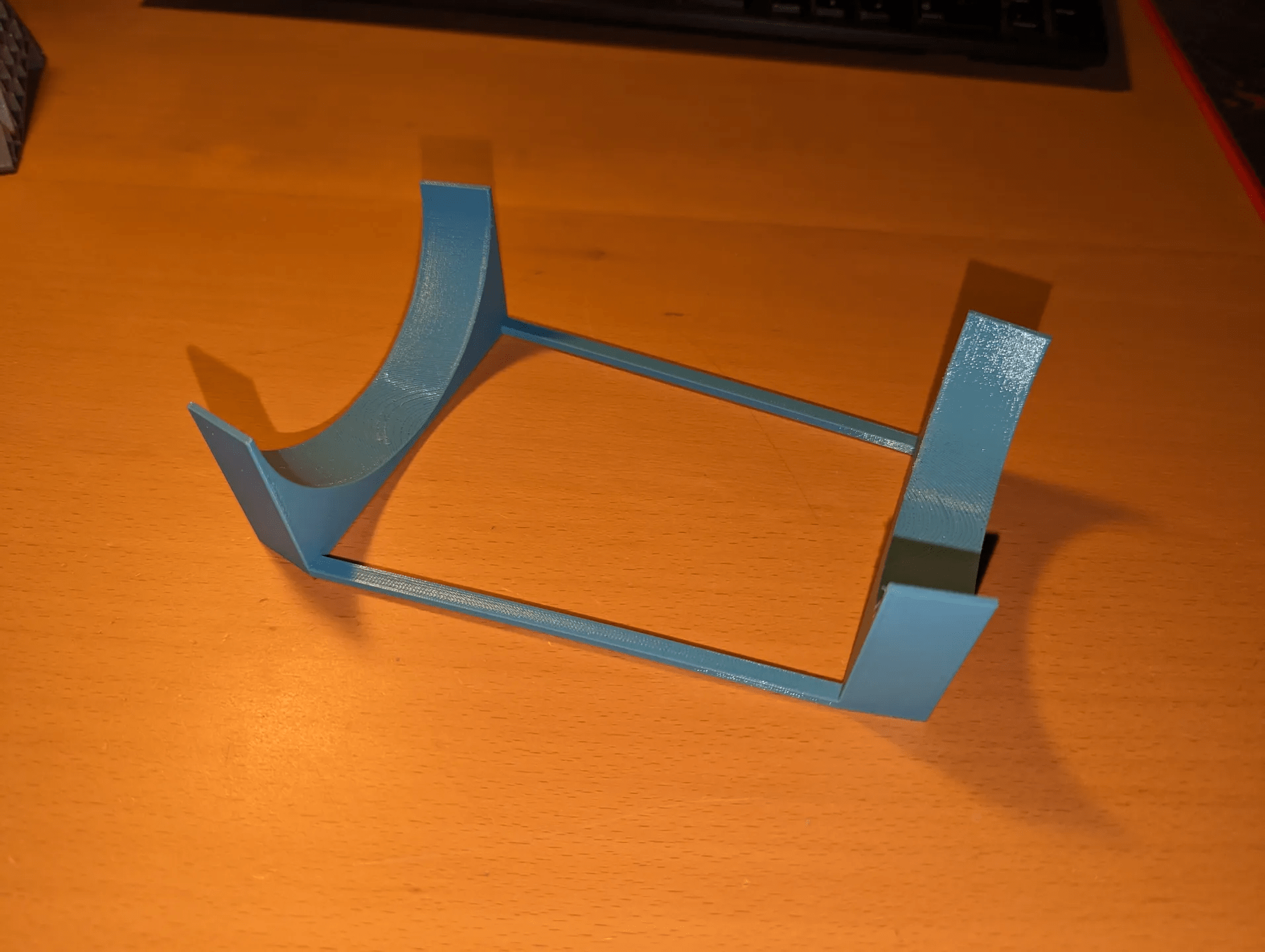
链接:https://www.printables.com/model/593999-inmoov-hand-stand?lang=cs
步骤3:组装
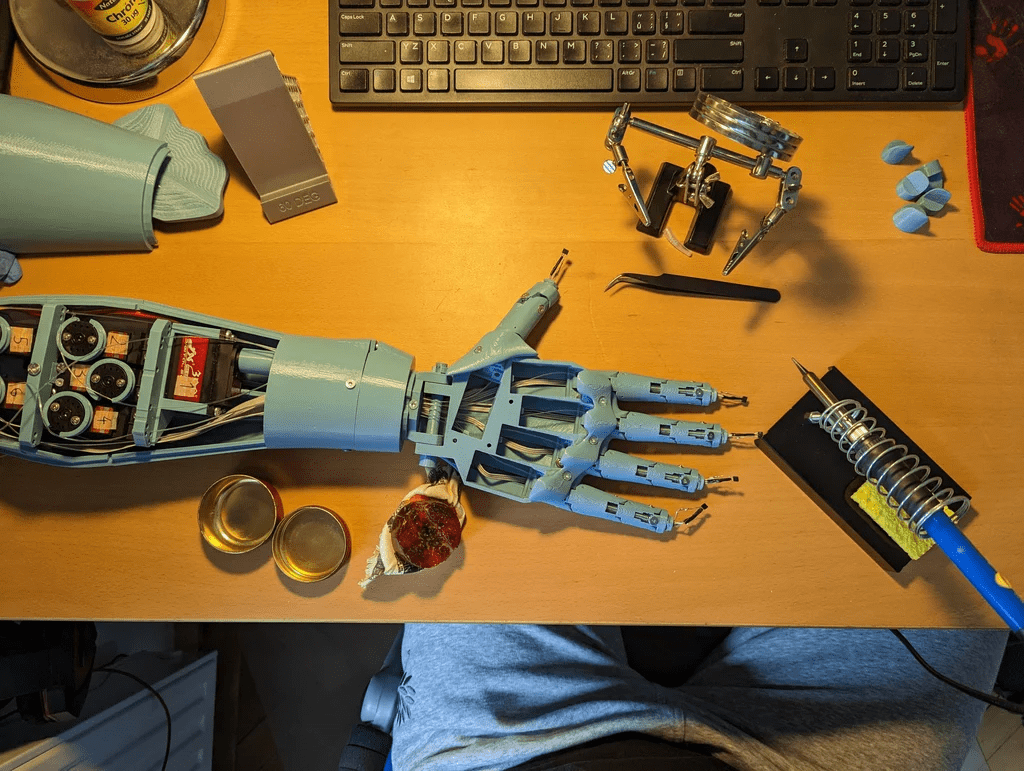
在组装时,可以参考InMoov提供的hand i2与前臂的教程,这些教程非常详细,提供了所有必要的信息。

初始部件的组装相对简单,只需用螺丝将整个设计固定在一起。稍微复杂的部分是确保钓鱼线的布置不打结,以及将霍尔传感器正确安装在指尖。
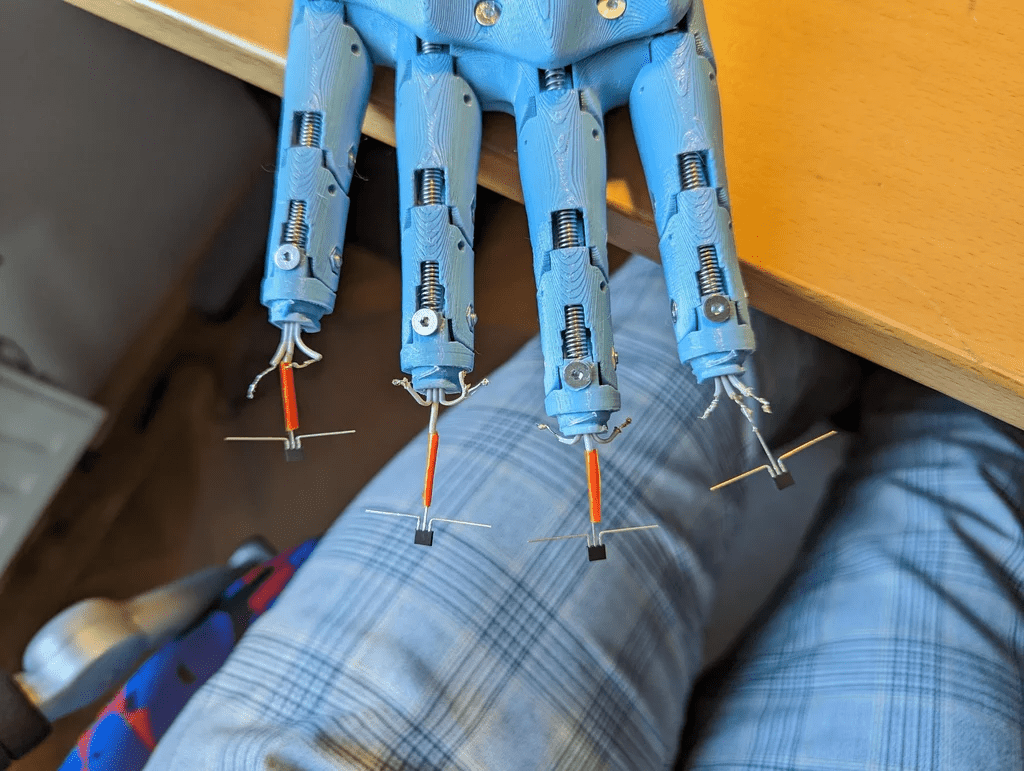
步骤4:硅胶指尖

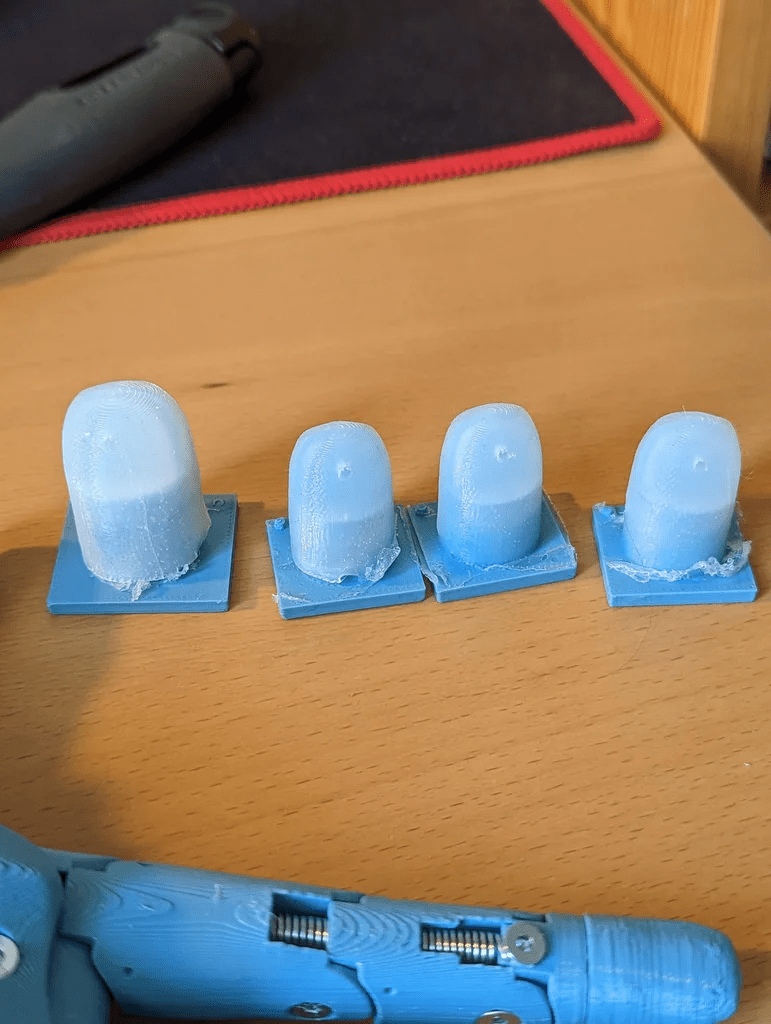
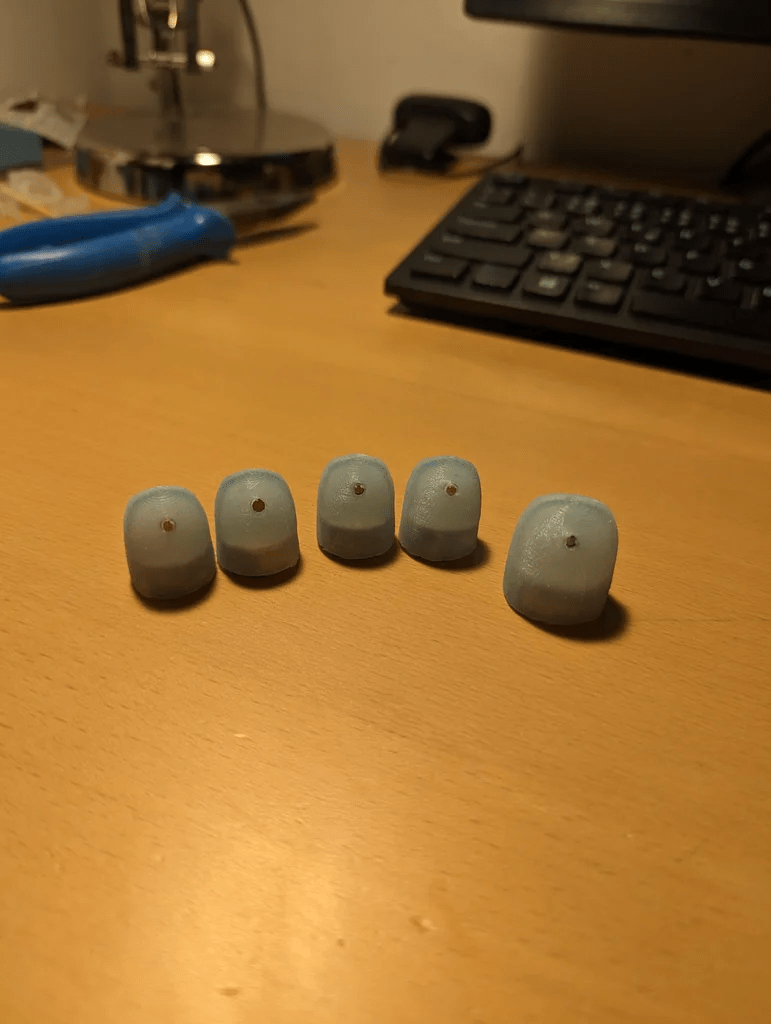
对于指尖来说,使用非常柔软的硅胶是很重要的,因为霍尔传感器的读取有一定的不确定性。硅胶越软,内部的磁铁运动幅度越大,从而更容易从数据中识别。将硅胶部分粘到3D打印出的部件上之后,可以用它来调整霍尔传感器的突出程度。

在这一切设置好之后,强烈建议将霍尔传感器固定在手指的末端,否则在手指运动过程中,霍尔传感器可能会稍微移动,从而影响测量结果。
步骤5:电路
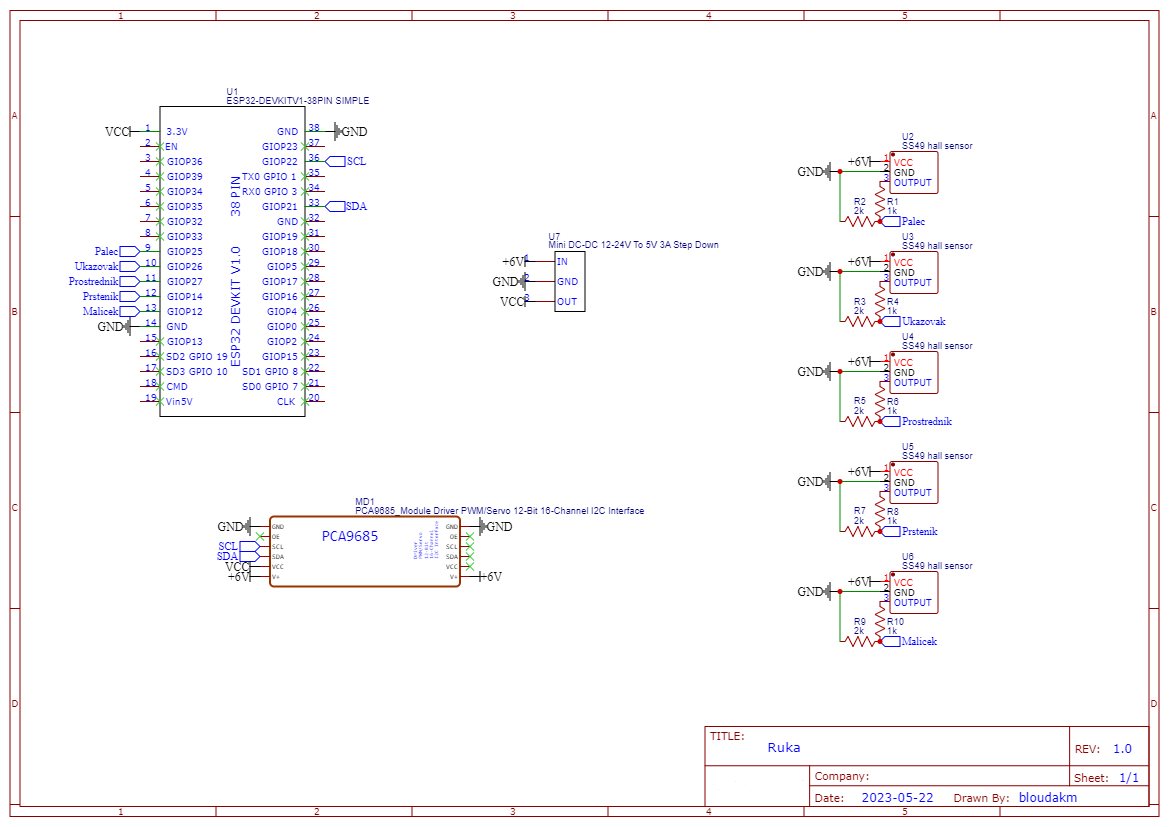
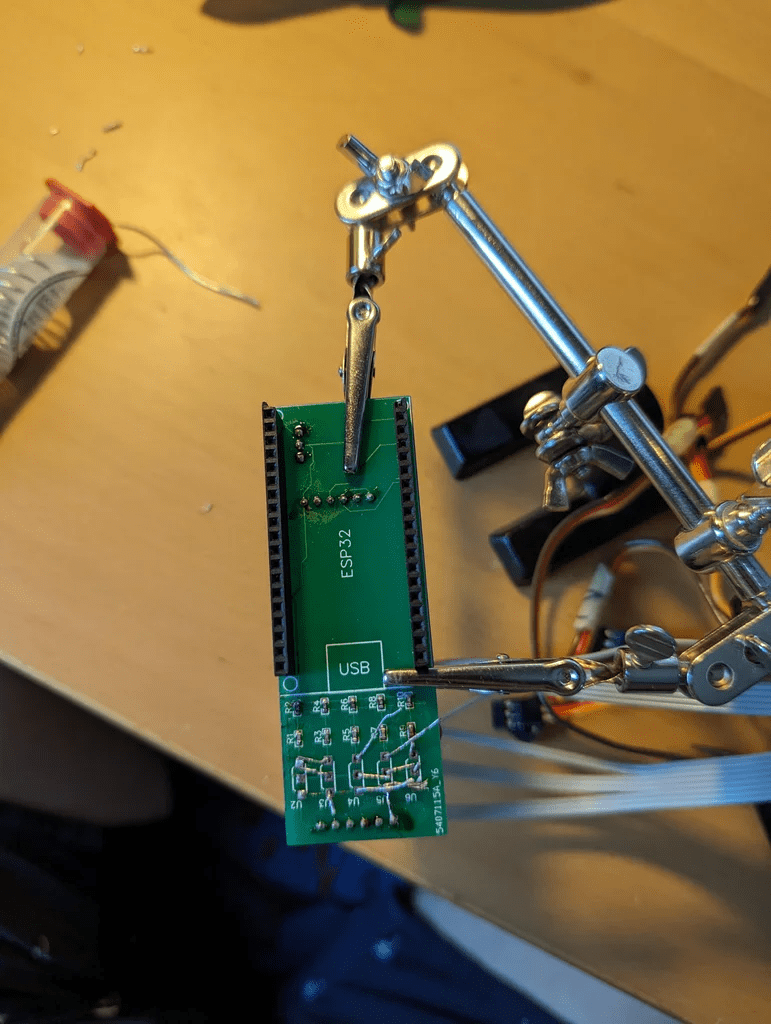
电路方面,使用16路舵机驱动模块会带来显著的效果,但也存在一些缺点。该驱动模块有两种不同的版本,虽然它们几乎相同,但在反极性保护电路(用于电容)所使用的晶体管上有区别,一个版本可承受约8A电流,而另一个版本仅可承受约0.5A,这远低于舵机实际需要的电流。因此,最好不要让伺服电机通过驱动模块供电,或者按照视频中所述进行小改动,并在使用电容时要格外小心。
关于霍尔传感器,我们需要使用一个电压分压器,因为它输出的电压范围在0V到5V之间,而ESP32只能正确读取0V到3.3V的ADC值。
对于整个电路,可以选择使用面包板,或者更好的是使用定制PCB(作者版本的GitHub链接)。
步骤6:测试
视频1
视频2
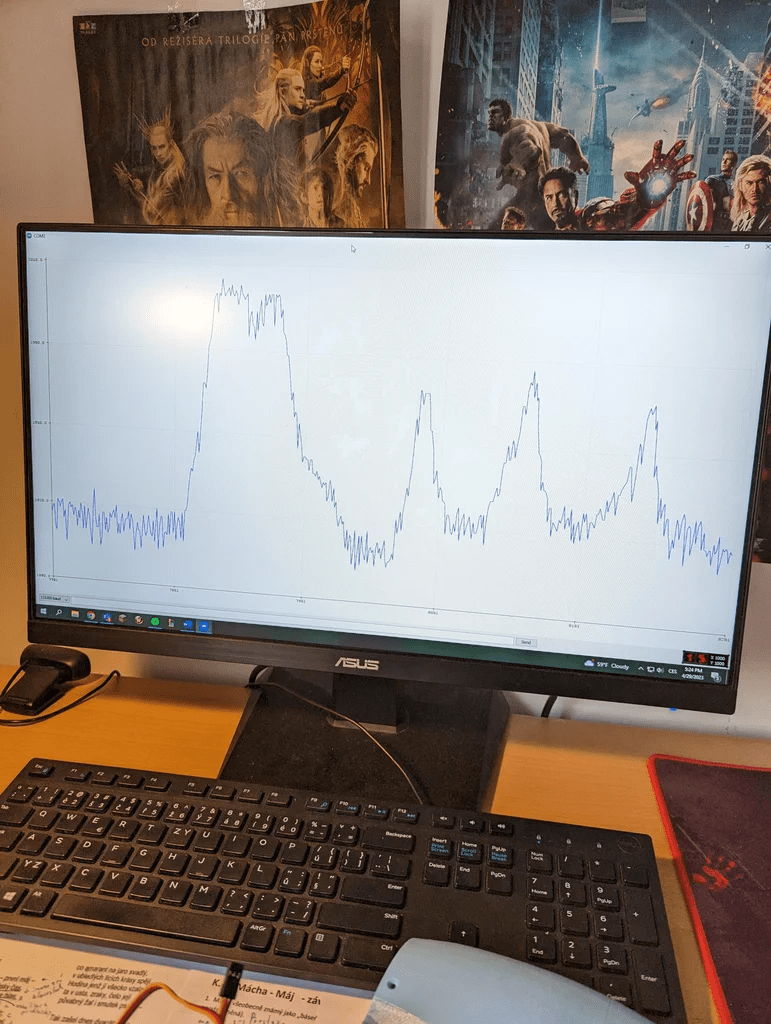
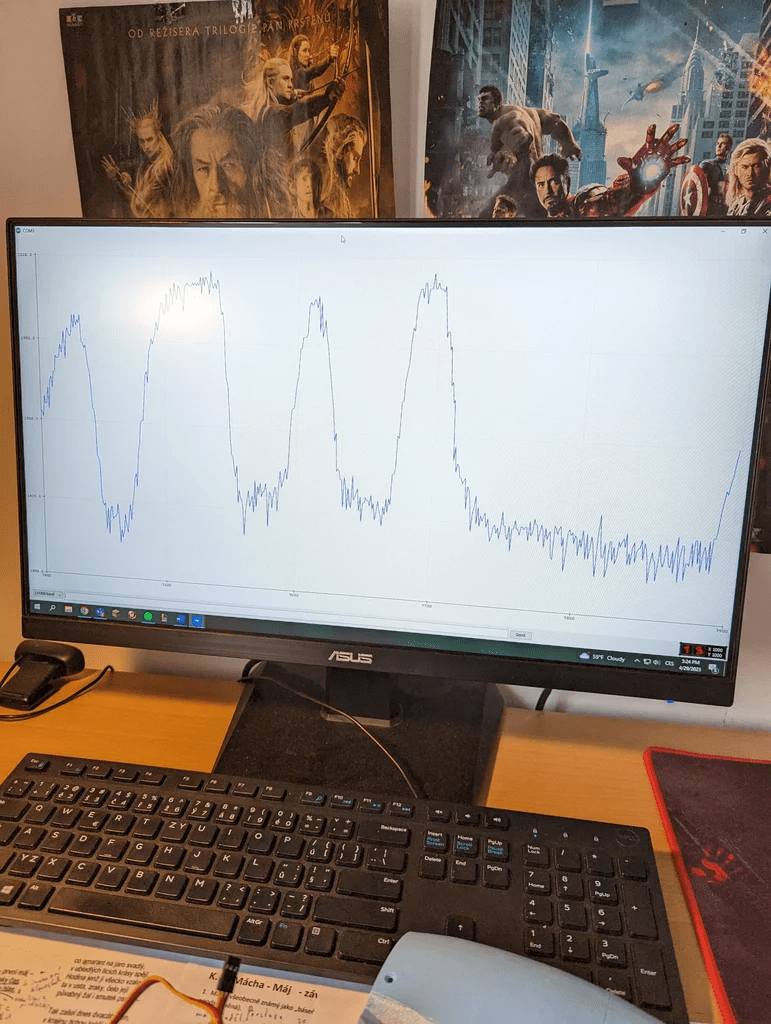
由于每个伺服电机和霍尔传感器都略有不同,所以需要对它们进行测试。
最重要的是测试霍尔传感器,因为它们测量的值将决定仿生手是否施加了足够的压力。我建议使用Arduino IDE的绘图功能来绘制数据,以观察数值何时超过自然不确定性范围。
为此,我们可以使用这个非常简单的代码片段:
int hall = "Pin number your hall sensor is connected to";
void setup() {
Serial.begin(115200);
pinMode(hall, INPUT);
}
void loop() {
Serial.println(analogRead(hall));
delay(10);
}
步骤7:代码
OpenCV(在VSCode中运行的Python代码)
就运行在带有网络摄像头的PC上的代码而言,我们需要完成两个主要任务:
第一个任务是使用OpenCV追踪手部及其元素。基于这些元素我们可以计算每根手指的位置。
第二个任务是通过串口将数据发送到ESP32,以便控制伺服电机。这些数据可以相对简化,因为我们不需要发送精确的角度值,而只需发送每个手指是否弯曲的信息。因此,我们可以发送五个0或1,并在末尾加一个符号以便后续识别每个数字的索引。
这种方法将手部追踪和数据传输简化为一个二进制状态系统,使得数据处理和传输更加高效,同时仍能提供足够的信息来控制仿生手的动作。
首先,我们需要为Python代码导入以下库:
import cv2
import mediapipe as mp
import time
import serial
然后,我们需要创建一个用于处理摄像头数据的类:
class HandDetector():
# Constructor of the class with parameters for the measurement
def __init__(self, mode=False, maxHands=1, detectionCon=0.5, trackCon=0.5):
self.mode = mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpHands = mp.solutions.hands
self.hands = self.mpHands.Hands()
self.mpDraw = mp.solutions.drawing_utils
# Function for finding and drawing the hand
def findHands(self, frame, draw=True):
imgRGB = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imgRGB)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw:
self.mpDraw.draw_landmarks(frame, handLms, self.mpHands.HAND_CONNECTIONS)
return frame
# Function for finding each hand landmark and drawing its position
def findPosition(self, frame, handNo=0, draw=False):
lmList = []
if self.results.multi_hand_landmarks:
myHand = self.results.multi_hand_landmarks[handNo]
for id, lm in enumerate(myHand.landmark):
h, w, c = frame.shape
cx, cy = int(lm.x * w), int(lm.y * h)
lmList.append([id, cx, cy])
if draw and id == 0:
cv2.circle(frame, (cx, cy), 15, (255, 0, 255), -1)
return lmList
接下来定义主函数:
def main():
# The prevTime and currentTime are used to calculate the FPS later
prevTime = 0
currentTime = 0
# Array for storing the info about the hand
hand = [["Wrist", False], ["Index", False], ["Middle", False],
["Ring", False], ["Thumb", False], ["Pinky", False]]
# Initializing the Serial and opencv
ser = serial.Serial(port="The name of the port the ESP32 is connected to")
# I had to include the "cv2.CAP_DSHOW" because I had issues with the webcam loading on my linux machine
cap = cv2.VideoCapture(0, cv2.CAP_DSHOW)
detector = HandDetector()
#MAIN LOOP OF THE CODE#
# Releasing the stuff allocated for opencv
cap.release()
cv2.destroyAllWindows()
main()
以及代码的主循环:
while (True):
# Finding the hands and reading the position of hte landmarks
ret, frame = cap.read()
frame = detector.findHands(frame)
lmList = detector.findPosition(frame)
if len(lmList) > 0:
j = 1
change = False
# Loop which checks if the top of the finger is below the second most top
for i in range(1, 6):
if i == 1 and lmList[4][1] < lmList[3][1] and not hand[4][1]:
# In case that it is true it changes all the needed data
hand[4][1] = True
change = True
print(hand[4][0], hand[4][1])
elif i == 1 and lmList[4][1] > lmList[3][1] and hand[4][1]:
hand[4][1] = False
change = True
print(hand[4][0], hand[4][1])
elif i != 1:
if lmList[i*4][2] > lmList[(i*4)-2][2] and not hand[j][1]:
hand[j][1] = True
change = True
print(hand[j][0], hand[j][0])
elif lmList[i*4][2] < lmList[(i*4)-2][2] and hand[j][1]:
hand[j][1] = False
change = True
print(hand[j][0], hand[j][0])
if j == 3:
j += 2
else:
j += 1
# If there has been any change in the state of the hand this code block will run
if change:
msg = ""
# Converts the boolean values to 0s and 1s
for i in range(6):
if hand[i][1]:
msg += "1"
else:
msg += "0"
# Adds the ending symbol and sends the data over to the ESP32
msg += '\n'
print(msg)
ser.write(msg.encode("Ascii"))
# Calculates the FPS and displays it on the frame
currentTime = time.time()
fps = 1/(currentTime-prevTime)
prevTime = currentTime
cv2.putText(frame, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_SIMPLEX, 3, (255, 0, 255), 3)
# Shows what the webcam sees on a frame
cv2.imshow("frame", frame)
# If we press "q" it quits running the program
if cv2.waitKey(1) & 0xFF == ord("q"):
break
整个代码 OpenCV:
import cv2
import mediapipe as mp
import time
import serial
class HandDetector():
def __init__(self, mode=False, maxHands=2, detectionCon=0.5, trackCon=0.5):
self.mode = mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpHands = mp.solutions.hands
self.hands = self.mpHands.Hands()
self.mpDraw = mp.solutions.drawing_utils
def findHands(self, frame, draw=True):
imgRGB = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imgRGB)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw:
self.mpDraw.draw_landmarks(frame, handLms, self.mpHands.HAND_CONNECTIONS)
return frame
def findPosition(self, frame, handNo=0, draw=False):
lmList = []
if self.results.multi_hand_landmarks:
myHand = self.results.multi_hand_landmarks[handNo]
for id, lm in enumerate(myHand.landmark):
h, w, c = frame.shape
cx, cy = int(lm.x * w), int(lm.y * h)
lmList.append([id, cx, cy])
if draw and id == 0:
cv2.circle(frame, (cx, cy), 15, (255, 0, 255), -1)
return lmList
def main():
prevTime = 0
currentTime = 0
hand = [["Wrist", False], ["Index", False], ["Middle", False],
["Ring", False], ["Thumb", False], ["Pinky", False]]
ser = serial.Serial(port="COM3")
cap = cv2.VideoCapture(0, cv2.CAP_DSHOW)
detector = HandDetector()
while (True):
ret, frame = cap.read()
frame = detector.findHands(frame)
lmList = detector.findPosition(frame)
if len(lmList) > 0:
j = 1
change = False
for i in range(1, 6):
if i == 1 and lmList[4][1] < lmList[3][1] and not hand[4][1]:
hand[4][1] = True
change = True
print(hand[4][0], hand[4][1])
elif i == 1 and lmList[4][1] > lmList[3][1] and hand[4][1]:
hand[4][1] = False
change = True
print(hand[4][0], hand[4][1])
elif i != 1:
if lmList[i*4][2] > lmList[(i*4)-2][2] and not hand[j][1]:
hand[j][1] = True
change = True
print(hand[j][0], hand[j][0])
elif lmList[i*4][2] < lmList[(i*4)-2][2] and hand[j][1]:
hand[j][1] = False
change = True
print(hand[j][0], hand[j][0])
if j == 3:
j += 2
else:
j += 1
if change:
msg = ""
for i in range(6):
if hand[i][1]:
msg += "1"
else:
msg += "0"
msg += '\n'
print(msg)
ser.write(msg.encode("Ascii"))
currentTime = time.time()
fps = 1/(currentTime-prevTime)
prevTime = currentTime
cv2.putText(frame, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_SIMPLEX, 3, (255, 0, 255), 3)
cv2.imshow("frame", frame)
if cv2.waitKey(1) & 0xFF == ord("q"):
break
cap.release()
cv2.destroyAllWindows()
main()
ESP32(Arduino IDE)
我们可以充分利用ESP32是双核这一特点,类似于PC的代码,我们同样需要完成两项主要工作。
首先是接收来自PC的数据。正如前面提到的,数据基本上是一个带有六位二进制数和结束符的字符串。此外,由于只有在状态变化时才会传输数据,我们可以立即将这些值(转换为true或false)分配给相应的变量。将这个任务分配给核心0,而主循环则在核心1上运行。
第二项工作就是控制手部运动。为此,我们需要不停地检查这些变量的状态是否发生变化,一旦有变化,伺服电机就会按小步长进行线性移动。在每一步后,首先需要检查变量是否没有再次变化,并且还要测量霍尔传感器读取的值。如果霍尔传感器的值过高,意味着磁铁距离手指核心太近,此时也要停止伺服电机的运动。
最初,我们需要用于伺服驱动的库,并且还将包含用于I2C通信的Wire库:
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
之后,我们需要定义脉冲长度的值,这些值因伺服类型而异,所以强烈建议查找特定伺服的信息或者像这样测试它们。
// Operating Speed of my Servo (6V): 0.21 sec/60°
#define SERVOMIN "Your value (mine was 70)" // This is the 'minimum' pulse length count (out of 4096)
#define SERVOMAX "Your value (mine was 510)" // This is the 'maximum' pulse length count (out of 4096)
#define SERVO_FREQ 50 // Analog servos run at ~50 Hz updates
现在我们必须定义其余要使用到的变量:
// Initializing servo driver object
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
// Index, Middle, Ring, Thumb, Pinky
// "state0" is the state the hand on the webcam is in and "state"
// is the stuff happening on the actual hand
bool state0[6] = {false, false, false, false, false, false};
bool state[6] = {false, false, false, false, false, false};
// Variable which indicates if there has been any change made to the state
bool change = false;
// Variables needed for reading the data from Serial
char sData;
String state;
// Variable for the hall sensor
// Index, Middle, Ring, Thumb, Pinky
// {pin, measured value, maximum value}
// ALL OF THE MAX VALUES WERE MEASURED BY ME THUS THEY WILL MOST LIKELY NOT BE SAME FOR YOU
int hall[5][3] = {{26, 0, 2200}, {27, 0, 2400}, {14, 0, 2300}, {25, 0, 2200}, {12, 0, 2300}};
// Setting the index numbers of each motor
int wrist = 0;
int thumb = 4;
int index = 1;
int middle = 2;
int ring = 3; // IMPORTANT this motor will rotate in the oposite direction
int pinky = 5; // IMPORTANT this motor will rotate in the oposite direction
// Function for calculating the PWM based on the degree you want
int degToPwm(int degree) {
return map(degree, 0, 320, SERVOMIN, SERVOMAX);
}
// Setting the degree thresholds used
int deg = degToPwm(75);
int deg1 = degToPwm(95);
int deg2 = degToPwm(85);
int startDeg = degToPwm(180);
接下来,需要定义我们将要使用的函数:
// Initialization of the task
TaskHandle_t recieveData;
// Function which reads the data from Serial
void recieveDataCode(void * parameter) {
for(;;) {
// Loop which runs when there is a message sent
while(Serial.available()) {
// Reading by each character
sData = Serial.read();
// If the character is the line ending symbol we know it is the end of the message
if(sData == '\n') {
// Loop for converting the string 0s and 1s to boolean
for(int i = 0; i < 6; i++) {
state0[i] = state.substring(i, i+1).toInt();
}
// Reseting the state temporary variable
state = "";
// Showing a change in state happened
change = true;
break;
} else { // If the character is not the line ending symbol we add it to the temporary state
state += sData;
}
}
delay(10);
}
}
// Function for actually moving the servos
void moveFinger(int fingerId, bool flex, int iteration) {
// Because the ring and pinky motors move in opposite direction
// we have to check which motors we are moving
if(fingerId != ring && fingerId != pinky) {
// We also need to check if we want the finger to flex or straighten
if(flex) {
// Moreover the thumb moves a little less so we also check for that
if(fingerId == thumb) {
// Because we want to be able to control the movement throughout we have to
// divide it into smaller parts
float fPwm = SERVOMIN + (float(103)*float(iteration))/float(130);
// But we also have to make sure to convert back to int because float would
// not be accepted by pwm function
int iPwm = round(fPwm);
pwm.setPWM(fingerId, 0, iPwm);
} else { // If the finger is not the thumb we just move it
pwm.setPWM(fingerId, 0, SERVOMIN + iteration);
}
} else { // For the case that is retracting we have to just do the opposite
if(fingerId == thumb) {
float fPwm = deg - (float(103)*float(iteration))/float(130);
int iPwm = round(fPwm);
pwm.setPWM(fingerId, 0, iPwm);
} else {
pwm.setPWM(fingerId, 0, deg1 - iteration);
}
}
} else if(fingerId == ring || fingerId == pinky) {
// In the case of the ring or pinky finger we do again the same
if(flex) {
pwm.setPWM(fingerId, 0, startDeg - iteration);
} else {
pwm.setPWM(fingerId, 0, deg2 + iteration);
}
}
}
补上设置和循环功能:
void setup() {
// Starting Serial on the same frequency as on the PC
Serial.begin(9600);
// Assigning the pinMode to all pins connected to hall sensor
for(int i = 0; i < 5; i++) {
pinMode(hall[i][0], INPUT);
}
// Setup and starting the servo driver
pwm.begin();
pwm.setOscillatorFrequency(27000000);
pwm.setPWMFreq(SERVO_FREQ);
delay(10);
// Pinning the created task to core 0
xTaskCreatePinnedToCore(
recieveDataCode,
"recieveData",
10000,
NULL,
0,
&recieveData,
0);
delay(500);
}
void loop() {
// Once there has been a change in the state this code block will run
if(change) {
// Looping firstly through the total steps of the servos
for(int i = 5; i < 135; i += 5) {
// Secondly through all of the hall sensors and reading the values
for(int k = 0; k < 5; k++) {
hall[k][1] = analogRead(hall[k][0]);
// If the measured value is greater than maximum value we stop the movement
if(hall[k][1] > hall[k][2]) {
state1[k+1] = state0[k+1];
}
}
// Thirdly through all the servo motors
for(int j = 0; j < 6; j++) {
if(state0[j] != state1[j]) {
// If the state on the PC does not match the one on the esp32 we
// call the function for moving the respective finger
moveFinger(j, state0[j], i);
}
}
// This delay is very important as it sets the speed of the movements
delay(17);
}
// At the and we make the state variables equal again
for(int i = 0; i < 6; i++) {
state1[i] = state0[i];
}
}
delay(100);
}
ESP32的完整代码:
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
#define SERVOMIN "Your value"
#define SERVOMAX "Your value"
#define SERVO_FREQ 50
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
bool state0[6] = {false, false, false, false, false, false};
bool state1[6] = {false, false, false, false, false, false};
bool change = false;
char sData;
String state;
int hall[5][3] = {{26, 0, 2200}, {27, 0, 2400}, {14, 0, 2300}, {25, 0, 2200}, {12, 0, 2300}};
int wrist = 0;
int thumb = 4;
int index = 1;
int middle = 2;
int ring = 3;
int pinky = 5;
int degToPwm(int degree) {
return map(degree, 0, 320, SERVOMIN, SERVOMAX);
}
int deg = degToPwm(75);
int deg1 = degToPwm(95);
int deg2 = degToPwm(85);
int startDeg = degToPwm(180);
TaskHandle_t recieveData;
void recieveDataCode(void * parameter) {
for(;;) {
while(Serial.available()) {
sData = Serial.read();
if(sData == '\n') {
for(int i = 0; i < 6; i++) {
state0[i] = state.substring(i, i+1).toInt();
}
state = "";
change = true;
break;
} else {
state += sData;
}
}
delay(10);
}
}
void moveFinger(int fingerId, bool flex, int iteration) {
if(fingerId != ring && fingerId != pinky) {
if(flex) {
if(fingerId == thumb) {
float fPwm = SERVOMIN + (float(103)*float(iteration))/float(130);
int iPwm = round(fPwm);
pwm.setPWM(fingerId, 0, iPwm);
} else {
pwm.setPWM(fingerId, 0, SERVOMIN + iteration);
}
} else {
if(fingerId == thumb) {
float fPwm = deg - (float(103)*float(iteration))/float(130);
int iPwm = round(fPwm);
pwm.setPWM(fingerId, 0, iPwm);
} else {
pwm.setPWM(fingerId, 0, deg1 - iteration);
}
}
} else /*if(fingerId == ring || fingerId == pinky)*/ {
if(flex) {
pwm.setPWM(fingerId, 0, startDeg - iteration);
} else {
pwm.setPWM(fingerId, 0, deg2 + iteration);
}
}
}
void setup() {
Serial.begin(9600);
for(int i = 0; i < 5; i++) {
pinMode(hall[i][0], INPUT);
}
pwm.begin();
pwm.setOscillatorFrequency(27000000);
pwm.setPWMFreq(SERVO_FREQ);
delay(10);
xTaskCreatePinnedToCore(
recieveDataCode,
"recieveData",
10000,
NULL,
0,
&recieveData,
0);
delay(500);
}
void loop() {
if(change) {
for(int i = 5; i < 135; i += 5) {
for(int k = 0; k < 5; k++) {
hall[k][1] = analogRead(hall[k][0]);
if(hall[k][1] > hall[k][2]) {
state1[k+1] = state0[k+1];
}
}
for(int j = 0; j < 6; j++) {
if(state0[j] != state1[j]) {
moveFinger(j, state0[j], i);
}
}
delay(17);
}
for(int i = 0; i < 6; i++) {
state1[i] = state0[i];
}
}
delay(100);
}
3D打印文件可以移步DF创客社区下载